

5. Кинематические связи в мрс
В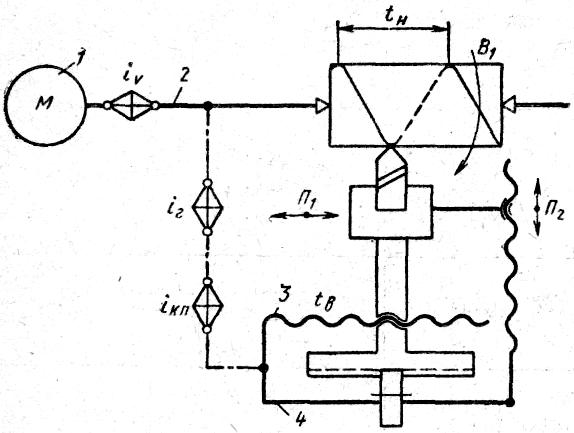 МРС движущиеся элементы связаны между
собой какими либо механизмами и такая
связь называется кинематической. Каждая
кинематическая связь состоит из одной
или нескольких механических, электрических,
гидравлических или других кинематических
цепей, осуществляющих передачу движения
от электродвигателя к исполнительному
звену станка. Кинематические связи
исполнительных звеньев станка между
собой называют внутренними кинематическими
связями, связи между подвижным
исполнительным звеном
МРС движущиеся элементы связаны между
собой какими либо механизмами и такая
связь называется кинематической. Каждая
кинематическая связь состоит из одной
или нескольких механических, электрических,
гидравлических или других кинематических
цепей, осуществляющих передачу движения
от электродвигателя к исполнительному
звену станка. Кинематические связи
исполнительных звеньев станка между
собой называют внутренними кинематическими
связями, связи между подвижным
исполнительным звеном
Рис. 2. Структурная схема токарно-винторезного станка
(шпинделем, ползуном и т.п.) и источником движения (электродвигателем) – внешними. Внутренняя кинематическая связь определяет только характер исполнительного движения. Внешняя кинематическая связь осуществляется несколькими звеньями, и при помощи органа настройки IV определяет заданную скорость исполнительного движения. Органами настройки могут быть электродвигатель, сменные зубчатые колеса и шкивы и т.д. В структурных кинематических схемах станков промежуточные звенья связей изображаются штриховой линией, а органы настройки – ромбом, как показано на рис.2.
На рис.2 показана структурная схема станка с резьбонарезной цепью, воспроизводящая сложное исполнительное движение по винтовой линии, состоящее из трех простых движений – вращательного В1 и прямолинейных П1 и П2, осуществляемых тремя кинематическими связями с органами настройки IV, IS и IКП. Внутренняя кинематическая связь состоит из двух внутренних кинематических цепей. Для образования резьбы с шагом t кинематическая цепь через гитару IS связывает вращение В1 с поступательным движением П1. Для получения конической резьбы перемещения П1 и П2 связываются органом настройки IКП.
Внутренняя связь, состоящая из двух внутренних кинематических цепей, соединена с источником движения одной внешней связью, настраиваемой органом настройки IV. Обе кинематические связи образуют одну кинематичес- кую группу. Кинематические группы бывают простые – содержащие один исполнительный орган, и сложные – несколько органов. При необходимости согласованных перемещений исполнительных органов между собой их связывают функциональными (внутренними) кинематическими цепями.
Количество кинематических групп, из которых состоит кинематическая
структура станка, соответствует количеству относительных движений между заготовкой и инструментом.
В станках с ЧПУ структура кинематических групп проще, т.к. в них используются регулируемые электродвигатели, но принцип характера структурных связей при кинематическом согласовании перемещений не изменяется.
6. Кинематическая настройка станков
Кинематическая настройка
станка – программирование скоростей
его рабочих органов на выполнение
конкретной технологической операции.
Кинематическим параметром любой
кинематической цепи является передаточное
отношение IЦ=![]() ,
определяемое как произведение передаточных
отношений кинематических пар, входящих
в состав этой цепи, и характеризующее
отношение скоростей ее конечных звеньев.
Под отношением i
принимают отношение частот вращения
(угловых скоростей) ведомого вала (вм)
к ведущему (вщ),
т.е. i = nВМ
/nВЩ.
,
определяемое как произведение передаточных
отношений кинематических пар, входящих
в состав этой цепи, и характеризующее
отношение скоростей ее конечных звеньев.
Под отношением i
принимают отношение частот вращения
(угловых скоростей) ведомого вала (вм)
к ведущему (вщ),
т.е. i = nВМ
/nВЩ.
Формулу настройки для расчета перемещений между органами станка определяют из уравнения кинематического баланса цепи, представляющего собой совокупность сомножителей передаточных отношений всех постоянных передач цепи и передаточные отношения органов настройки.
Для настройки станка на заданные движения необходимо:
Составить условия кинематического согласования движений конечных звеньев цепи в соответствии с их функциональным назначением.
Составить уравнения кинематического баланса цепей с учетом условий согласования.
3. Решить уравнение баланса относительно передаточного отношения органа настройки.
Условие нарезания резьбы с шагом Р: один оборот заготовки должен соответствовать перемещению инструмента на расстояние, равное шагу резьбы, т.е.
1 об. заг. Р (мм) перемещ. резца.
Уравнение кинематического баланса цепи : 1об.заг. i1 i2…iВИНТ iП PХВ = P,
где i1 i2… iП – передаточные отношения постоянных передач резьбонарезной цепи станка, PХВ – шаг ходового винта (мм), iВИНТ – передаточное отношение органа настройки станка (винторезной гитары).
Решив уравнение кинематического баланса относительно параметра iВИНТ, получаем iВИНТ = Р/ i1 i2… iПPХВ .
Условие согласования для скоростной цепи станка определяется связью частоты вращения электродвигателя n эд и заданной скорости движения исполнительного звена станка n i, т.е. n эд → n i. Уравнение кинематического баланса скоростной цепи станка: n эд i1 i2…iV… iП=ni, где i1 i2… iП – передаточные отношения всех постоянных передач скоростной цепи, iV – общее передаточное отношение коробки скоростей станка. Решив уравнение кинематического баланса, рассчитывают iV и подбирают числа зубьев передач.
На станках с ЧПУ кинематическая настройка осуществляется путем расчета величин движений звеньев станка и представления их в закодированном виде на программоносителе.