

11.6. Суммирующие механизмы, применяемые в станках
Определение суммарных перемещений
Суммирование движений на одном и том же исполнительном звене применяется в станках для сложения формообразующих движений между собой, дели- тельного движения с формообразующим и т. д. Суммирование часто использу- ется в тех случаях, когда исполнительному звену необходимо сообщить перио- дическое вспомогательное движение, иногда — ручное, не прекращая в то же время движения формообразования. В цепях привода применяют суммирова- ние, если одна и та же кинематическая группа получает движение от двух дви-
гателей
для рабочих и для холостых ходов или по
двум различным
кинемати-

Рис.37 Рис.38 Рис.39
ческим цепям. Суммирование применяется также для получения неравномерного
движения. С помощью суммирования можно обеспечить более точную настройку кинематических цепей. Для суммирования движений с помощью цилиндри-
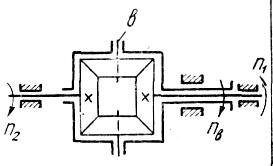
ческих зубчатых колес используется обычная планетарная передача (рис.37), в которой центральному колесу z1 сообщается движение n1, и тогда колесо z2 получает суммарное движение, слагающееся из двух вращений — от колеса z1 и от вращения водила в. Суммарное движение определится из формулы Виллиса:
![]() n2=nв(
1—
n2=nв(
1—![]() )
– n1
)
– n1
Для
примера дана схема дифференциала
зубошлифовального
станка мод. 5831
(рис.38).
Передаточное
отношение между
водилом (корпусом
дифферен-
циала) в
и его центральным
колесом z4
определится по схеме механизма, для
которой можно написать
![]()
Если
взять косозубую передачу (рис.39)
и сообщить колесу 1,
наряду с вращением
n1,
осевое перемещение L1,
то на колесе 2 получится
суммарное вращение п2:
n2 = —
где — угол наклона зуба; ms — торцовый модуль сопряженных зубчатых колес. Этот механизм применяют редко и лишь при малом перемещении L1, выполняемом чаще всего вручную.
В качестве суммирующего механизма используется и реечная передача (рис.40). Здесь и рейка, и реечное колесо получают поступательное переме- щение L1 и L2. Суммарное вращательное движение реечного колеса


Рис.38 Рис.39 Рис.40
Рис.40 Рис.41 Рис.42
Аналогичный механизм
(рис.41),
но другой
конструкции, применен
на зубошлифовальных
станках Мааg
в цепи образования профиля зуба. Реечная
передача по схеме на рис.28
заменена
здесь барабаном с
натянутыми на нем
стальными лентами,
концы которых укреплены в раме.
Когда суппорт с
шли-
фуемым зубчатым
колесом переместятся на величину L2,
то барабан, жестко сидящий на шпинделе
заготовки, будет перекатываться
относительно лент, поворачивая заготовку
на величину
![]() , где D6
— диаметр барабана.
Вместе с тем через
рычаг движение
L2
произведет перемещение рамки
с лентами
на величину Lt
в противоположном направлении, и барабан
получит
дополнитель-
ный поворот
на величину
, где D6
— диаметр барабана.
Вместе с тем через
рычаг движение
L2
произведет перемещение рамки
с лентами
на величину Lt
в противоположном направлении, и барабан
получит
дополнитель-
ный поворот
на величину
![]() . Суммарное число оборотов
барабана
n2=
. Суммарное число оборотов
барабана
n2= .
Благодаря применению
этого суммирующего механизма удалось
уменьшить количество сменных барабанов
2, так как с помощью одного и того же
барабана получается
несколько различных настроек
кинематической цепи
за
счет изменения плеч рычага.
.
Благодаря применению
этого суммирующего механизма удалось
уменьшить количество сменных барабанов
2, так как с помощью одного и того же
барабана получается
несколько различных настроек
кинематической цепи
за
счет изменения плеч рычага.
Червячная
передача c
удлиненным червяком
применяется в
качестве
сумми-
рующего
механизма в зубострогальном станке для
конических колес мод. 528 и в ряде других
станков. Суммарное число
оборотов червячного
колеса опреде-
лится по
формуле:
![]() (см. на рис.42,
где k
— число заходов
червяка; z
— число зубьев
червячного колеса;
т — модуль).
(см. на рис.42,
где k
— число заходов
червяка; z
— число зубьев
червячного колеса;
т — модуль).
 Очень часто для
суммирования движений в станках
применяются
дифференциалы с
коническими колесами
(рис.43).
Корпус дифференциала является водилом.
Если числа зубьев колес 1
и 2
одинаковы, то
передаточное отношение водила к любому
центральному колесу равно 2,
от центрального колеса к
водилу равно 1/2
и между центральными
колесами равно 1.
Таким образом,
п2
= п1
± 2пв
.
Очень часто для
суммирования движений в станках
применяются
дифференциалы с
коническими колесами
(рис.43).
Корпус дифференциала является водилом.
Если числа зубьев колес 1
и 2
одинаковы, то
передаточное отношение водила к любому
центральному колесу равно 2,
от центрального колеса к
водилу равно 1/2
и между центральными
колесами равно 1.
Таким образом,
п2
= п1
± 2пв
.
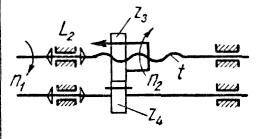
Рис.44 Рис.43
В токарно-винторезных станках широко применяется механизм винт — гайка (рис.44). Если во время вращения винта вращать и его гайку, то получим суммирование движений L2=t(n1± n2).
Ходовые винты с большим шагом резьбы используются иногда для получе- ния вращательного суммарного движения (на зубодолбежных станках для наре- зания косозубых колес), ходовой винт с шагом малой величины используется для осуществления поступательного перемещения (для коррекции шага нарезаемой резьбы на токарно-винторезных станках).
Все приведенные выше механизмы представляют собой примеры незамк - нутых суммирующих механизмов. Каждый из них имеет два ведущих звена с независимыми скоростями. В металлорежущих станках применяются также и замкнутые суммирующие механизмы.
Для замкнутого дифференциального суммирующего механизма (рис.45) уравнение кинематического баланса при ведущем колесе 5 будет
 ;
при ведущем водиле
;
при ведущем водиле
Рис.45
Рис.46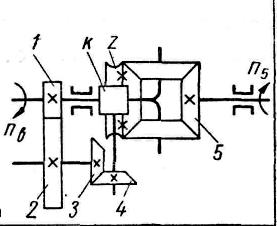
Рис.46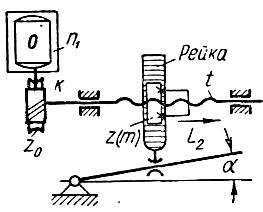
![]() t.
Но это — не суммарное перемещение
L2.
Здесь гайка будет перемещать вдоль
ходового винта
ползушку по линейке, установленной под
углом
к оси винта. Рейка вследствие этого
переместится в поперечном направлении
и повернет гайку, которая относительно
ходового винта переместится на величину
t
t.
Но это — не суммарное перемещение
L2.
Здесь гайка будет перемещать вдоль
ходового винта
ползушку по линейке, установленной под
углом
к оси винта. Рейка вследствие этого
переместится в поперечном направлении
и повернет гайку, которая относительно
ходового винта переместится на величину
t![]() .
Значения всех букв указаны на схеме.
.
Значения всех букв указаны на схеме.
Уравнение кинематического баланса
![]()
 ,
откуда
L2
=
,
откуда
L2
=

При определении суммарного движения в таких механизмах необходимо строго учитывать направления движений каждого звена, так как от этого зависит конечный результат.