

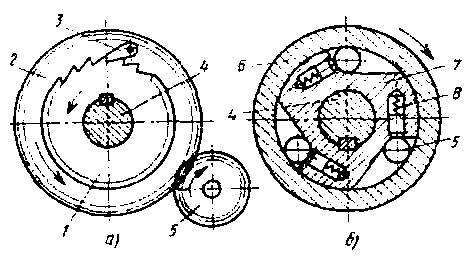
Механизмы обгона
рис.26
 вижение
от зубчатого колеса 5. Если сообщить
вращение диску по стрелке, защелка 3
поведет храповое колесо с валом 4.
вижение
от зубчатого колеса 5. Если сообщить
вращение диску по стрелке, защелка 3
поведет храповое колесо с валом 4.
Если последнему сообщить боль- шую частоту вращения в том же направлении (от другого источника движения), то оно начнет обгонять диск 2. Защелка 3 препятствовать этому обгону не будет. После выключения быстрого вращения вала 4 защелка зацепит храповое колесо и поведет его снова. Таким образом механизм обгона позволит, не выключая привода медленного вращения, включать быстрое вращение вала 4.
На рис.26, б представлен роликовый механизм обгона, получивший наиболь- шее распространение. На валу 4 свободно насажена втулка 6, а на шпонке
- диск 7, имеющий три выреза. Внутри последних находятся ролики 5, поджи- маемые пружинами 8. Медленное вращение по часовой стрелке получает втул- ка 6. Ролики, увлекаемые силами трения и поджимаемые пружинами, попадают в клиновое пространство и заклиниваются между внутренней поверхностью втулки 6 и вырезами диска 7. В результате этого диск начинает медленно вра- щаться вместе с валом 4. Если последнему сообщить от другого источника большую угловую скорость в том же направлении (по часовой стрелке), то вместе с ним получит вращение и диск 7. Ролики вместе с диском начнут обгонять втулку 6 и расклинятся. При выключении быстрого вращения ролики заклиниваются, и вал снова получит малую скорость вращения.
Механизм может работать и по другому варианту. Если ведущим звеном будет диск 7 и вращение его происходит против часовой стрелки, то втулка 6 окажется ведомой. При реверсировании механизм расклинивается.
11.5. Mеханизмы получения прямолинейного поступательного движения
Для преобразования вращательного движения в поступательное в станко- строении используются различные типовые механизмы, показанные далее.
В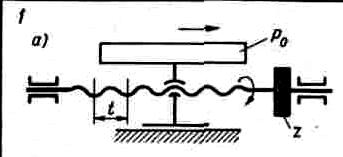
 интовая
передача. Наиболее
распространенным механизмом для
преобразо-
вания
вращательного движения в поступательное
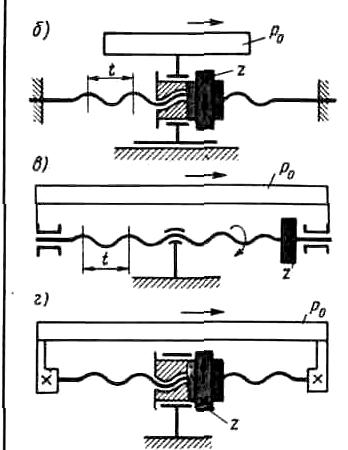
являются винтовые передачи (рис.27).
При этом могут быть различные варианты
преобразования движения:
интовая
передача. Наиболее
распространенным механизмом для
преобразо-
вания
вращательного движения в поступательное
являются винтовые передачи (рис.27).
При этом могут быть различные варианты
преобразования движения:
1) винт вращается, а гайка совместно с рабочим органом Р0 движется поступательно — поз. а (перемещение продольных салазок суппорта токарного станка при нарезании резьб);
2) винт неподвижный, гайка вращается и совместно с рабочим органом Р0 совершает поступательное движение — поз. б (стол продольно-фрезерного станка модели 6А662);
3
Рис.27
4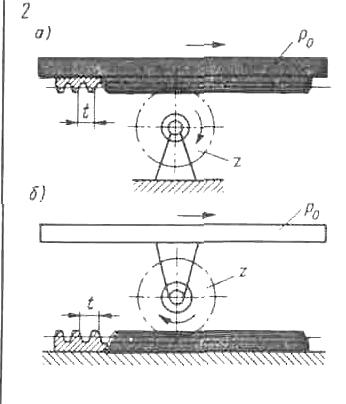 )
гайка вращается, а винт совместно с
рабочим органом Р0
имеет
посту
- пательное
движение —
поз.
г (суппорт строгального
станка).
)
гайка вращается, а винт совместно с
рабочим органом Р0
имеет
посту
- пательное
движение —
поз.
г (суппорт строгального
станка).
Р
Рис.28
Ч
Рис.29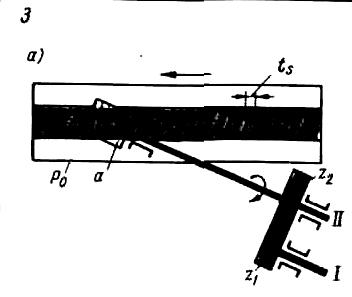
Рис.30
Рис.31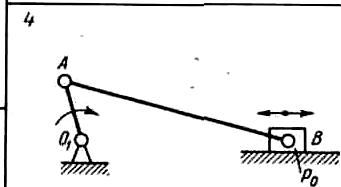
К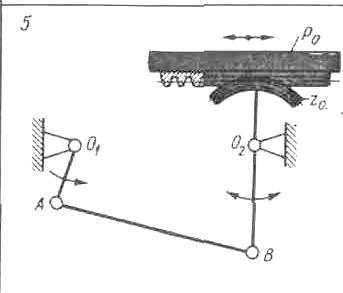 ривошипно-реечный
механизм
ривошипно-реечный
механизм
Этот механизм (рис.31) состоит из четырехзвен- ника с кривошипом 01 А, сектора zc и рейки, закрепленной на рабочем органе Р0 . При непре- рывном вращении кривошипа О1 А рабочий орган Р0 будет совершать прямолинейное возвратно-поступательное движение. В зубодолбежном станке модели 514 для сообщения возвратно-поступательного движения штосселю с долбяком применен двойной криво- шипно-реечный механизм.
К
Рис.32
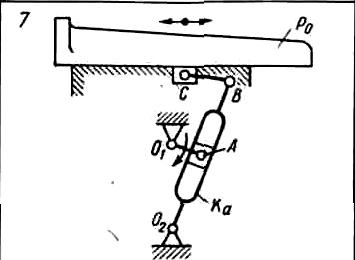 При вращении кривошипа
О1
А (рис.
32)
кулиса Ка
совершает
возвратно-качательное движение и
через шатун ВС
сообщает рабочему органу Р0
прямолинейное
возвратно-поступательное движение.
При вращении кривошипа
О1
А (рис.
32)
кулиса Ка
совершает
возвратно-качательное движение и
через шатун ВС
сообщает рабочему органу Р0
прямолинейное
возвратно-поступательное движение.
К
Рис.32
Механизм с вращающейся кулисой
Рис.34
Рис.33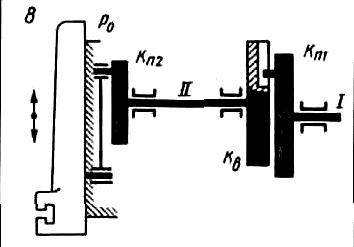
Кулачковые механизмы. Эти механизмы позволяют обеспечить любой закон изменения скорости рабочего органа, получать необходимое соотноше- ние скорости рабочего и обратного ходов и в отличие от других механизмов могут одновременно выполнять функции командно-распределительного устройства. Благодаря этим преимуществам кулачковые механизмы (рис.34) с дисковыми, торцовыми или цилиндрическими кулачками нашли широкое применение в станках-автоматах и полуавтоматах для осуществления автоматического цикла работы.
Рис.34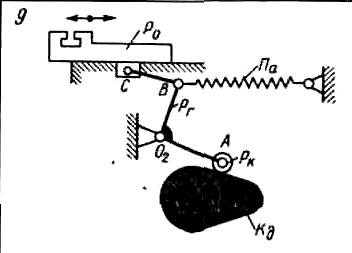
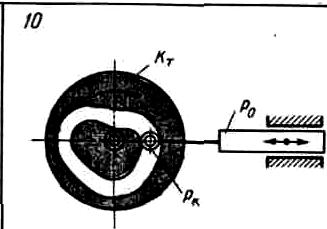
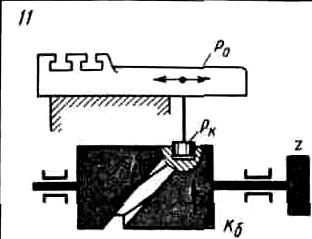
Рис.35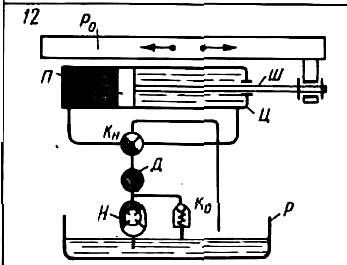
Для преобразования вращательного движения в прямолинейно-поступательное движение в совре- менных станках особенно широко используется гидропривод (рис. 35). Принцип работы гидропри- вода заключается в следующем: масло из резервуара Р подается насосом Н под давлением через дроссель Д к золотниковому крану Кн . В зависимости от положения крана масло подается по правому или левому маслопроводам в соответствующую полость цилиндра и заставляет перемещаться поршень П со штоком Ш и связанный с ними рабочий орган Р 0 .
П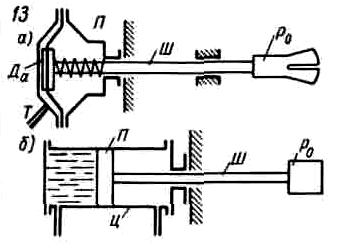 невмопривод
невмопривод
В
Рис.36