

№1. Місце фізики у сучасному житті.
Фізика – це наука, що вивчає найпростіші і разом з тим найбільш загальні закономірності явищ природи, властивості і будову матерії та закони її руху. Фізика має спільні об’єкти і методи дослідження з іншими природничими науками, внаслідок чого виникли цілі галузі знань: фізична хімія, хімічна фізика, хімічна термодинаміка, астрофізика, біофізика, геофізика. Основою сучасної фізики є математика. Математичний апарат широко використовується при обробці й узагальненні експериментальних результатів. Фізика є основою сучасного науково-технічного прогресу: механічний транспорт, електротехніка, радіотехніка, теплотехніка, автоматика і телемеханіка, будівельна техніка, сучасні технології, напівпровідникова і обчислювальна техніка та багато інших прикладних застосувань фізики. Технічний прогрес також сприяє розробці сучасної експериментальної бази фізичних досліджень: вимірювальних приладів, мікроскопів, спектрографів, прискорювачів елементарних частинок та ін.. Фізика має надзвичайно велике загальнонаукове значення як одна із галузей інтелектуальної діяльності людини, що формує сучасне світосприйняття і світорозуміння.На жаль, використання досягнень сучасної фізики дає не тільки позитивні наслідки. На сучасному етапі розвитку науки і техніки виникли такі важливі проблеми людства, як боротьба за попередження ядерних війн, скорочення ядерних озброєнь, розв’язання екологічних проблем, відчуження людини від природи тощо. Також фізика має велике значення у розвитку всіх галузей економіки. Досягнення фізики в значній мірі визначають зміст сучасної науково-технічної і технологічної революції, вони становлять основу науково-технічного прогресу.
№2. Підрозділи фізики та предмети їх досліджень.
Фізика — природнича наука, яка досліджує загальні властивості матерії та явищ у ній, а також виявляє загальні закони, які керують цими явищами. Розділів фізики багато: механіка, термодинаміка, оптика, електродинаміка, електрика, ядерна фізика, теплова та молекулярна фізика, статистична фізика і т.д.Один з фундаментальних розділів фізичної науки є механіка. Механіка – це наука про механічний рух, механічні взаємодії і рівновагу тіл. Механіку поділяють на класичну, релятивістську і квантову. Термодинаміка - розділ теоретичної фізики, що стосується законів явищ поширення та збереження тепла. Розрізняють феноменологічну та статистичну термодинаміки. Остання в свою чергу поділяється на класичну й квантову.Оптика — розділ фізики, в межах якого вивчається природа оптичного випромінювання (світла), досліджуються процеси випромінювання світла, його поширення в різноманітних середовищах і взаємодії з речовиною.Електродинаміка — розділ фізики, який займається вивченням взаємодії наелектризованих, намагнічених тіл та провідників зі струмами. Предмет електродинаміки включає зв'язок електричних і магнітних явищ, електромагнітне випромінювання, електричний струм і його взаємодія з електромагнітним полем. Електрика — розділ фізики, що вивчає електричні явища: взаємодію між зарядженими тілами, явища поляризації та проходження електричного струму.Ядерна фізика — розділ фізики, який вивчає структуру і властивості атомних ядер, та механізми ядерних реакцій (в тому числі радіоактивний розпад).Молекулярна фізика — розділ фізики, який вивчає речовину на рівні молекул. Речовину на рівні атомів вивчає атомна фізика.Статистична фізика — розділ теоретичної фізики, що вивчає поводження систем з дуже великим числом часток у стані локальної рівноваги.
№3 Поняття про матерію та її рух. Матеріальна єдність світу. Простір і час.
Матерія і рух нерозривні і цей нерозривний зв’язок яскраво виділяється у теплових явищах. Оскільки атоми і молекули матеріальні і їм властивий неперервний і вічний рух, звідси випливає, що матерія і рух вічні і нерозривні. Можуть бути різні види рухів, і різні види та форми матерії. Ці рухи можуть змінюватись і переходити з одного виду в інший. Поняття про простір формується у нашій свідомості із спостережень того, що кожне тіло займає певне положення відносно інших тіл, має розміри, форму, об’єм, просторову структуру, тобто відповідний характер розміщення структурних елементів у просторі, який безперервно змінюється внаслідок руху матерії. Під час руху тіл або структурних елементів відбувається відносна зміна їхнього положення, і це відображається як рух у просторі. Уявлення про простір і час сформувалися у свідомості людини у нерозривній єдності з матерією та її рухом. Простір визначає порядок співіснування матеріальних об’єктів і їх відносних розмірів, час- послідовність подій і їх відносну тривалість.
№4 Поняття симетрії. Симетрія простору і часу.
Симетрія простору полягає в тому, що об’єкти розташовані в одній частині простору, можуть бути дзеркальним відображенням матеріальних об’єктів в іншій частині простору, щодо певної лінії.
Симетрія часу означає інваріантність фізичних законів щодо вибору початку відліку часу.
№5 Фізичні закони. Симетрія фізичних законів.
Для характеристики природних явищ і властивостей предметів у фізиці вводять поняття фізичні величини. Рівняння, які описують ті чи інші природні явища або їх сукупність, називають фізичними законами. Фізичні закони симетричні відносно таких найбільш загальних перетворень: відносно просторового перенесення, відносно повороту системи як цілого в просторі, відносно переміщень у часі, відносно рівномірного руху по прямій.
№6 Чотири види фундаментальної взаємодії та роль у будові матерії.
Існують такі види взаємодії властивостей матерії:
Сильна (ядерна) :
Мають своє поле і кванти;
Притаманні не лише макросвіту;
Забезпечує зв’язок нуклонів.
Електромагнітна :
Проявляється на великих відстанях;
Відбуваються між частками, що володіють електричним зарядом.
Слабка :
Притаманні лише мікросвіту;
Проявляються в
 -
розпаді;
-
розпаді;
Гравітаційна:
Проявляється на великих відстанях;
Діє за законом всесвітнього тяжіння Ньютона.
№ 7 Основні означення і поняття механіки матеріальної точки.
Механічним рухом називають зміну положення тіла відносно інших тіл з часом.
Тіло, розмірами якого у даних умовах задачі можна знехтувати, називають матеріальною точкою.
Положення тіла можна задати тільки відносно іншого тіла. Таке тіло називають тілом відліку. Тілом відліку може бути будь-яке тіло. Для визначення положення тіла у просторі користуються системою координат. Якщо тіло рухається, тобто його координати змінюються відносно тіла відліку, необхідним є прилад для вимірювання часу руху тіла.
Поступальний рух |
Обертальний рух |
рівномірний |
|
s=vt v=const a=0 |
|
рівнозмінний |
|
|
|
нерівномірний |
|
|
|





№8 Класифікація механічних рухів. Основна задача механіки (ОЗМ), параметричний опис руху, рівняння руху.
Механічним рухом називають зміну положення тіла відносно інших тіл з часом.
Тіло, розмірами якого у даних умовах задачі можна знехтувати, називають матеріальною точкою.
Положення тіла можна задати тільки відносно іншого тіла. Таке тіло називають тілом відліку. Тілом відліку може бути будь-яке тіло. Для визначення положення тіла у просторі користуються системою координат. Якщо тіло рухається, тобто його координати змінюються відносно тіла відліку, необхідним є прилад для вимірювання часу руху тіла.
У фізиці розглядають різні види руху:
поступальний,коливальний,обертальний.
Рух тіла, при якому всі його точки рухаються однаково, називають поступальним рухом. Поступально рухається автомобіль на прямолінійній ділянці шляху, коливається маятник годинника, а стрілки годинника обертаються навколо нерухомої осі.
Коливаннями називають фізичні процеси, які точно чи майже точно повторюються через однакові проміжки часу.
Рух по будь-якій криволінійній траєкторії називається обертальним.
Основною задачею механіки є встановлення зв’язку між просторовими характеристиками руху і часом без урахування взаємодій між тілами та їх інертності.
№9 Кінематика твердого тіла. Теорема Ейлера.
Основні характеристики руху:
1
 .вектор
переміщення
характеризує
.вектор
переміщення
характеризує

2.швидкість
- Кінематичне рівняння поступального руху
3 .
прискорення
.
прискорення
Криволінійний рух – це рух який виконує тіло по дугам кіл різного радіусу.
кінематичне рівняння обертального руху.
Теорема Ейлера: тверде тіло, що має одну нерухому точку, шляхом повороту на деякий кут навколо осі, яка проходить через цю точку, може бути переведене із одного положення в будь-яке інше.
Поступальний рух |
Обертальний рух |
рівномірний |
|
s=vt v=const a=0 |
|
рівнозмінний |
|
|
|
нерівномірний |
|
|
|
№10 Межі застосування кінематики в технологічних процесах.
Машинобудування, будівництво, інформаційні технології, архітектура, паровий двигун
№11 Гравітаційна взаємодія, закон всесвітнього тяжіння.
У природі спостерігається 4 види взаємодій: гравітаційна, електромагнітна, ядерна (або сильна) і слабка взаємодії. У механіці розглядаються три види сил: силу тертя, силу пружності і силу тяжіння. Перші дві (тертя і пружності) мають електромагнітний характер, третя (тяжіння) - належить до гравітаційних взаємодій. Найслабшими серед усіх сил є гравітаційні. До 17 століття вчені вважали, що лише Земля має особливу властивість притягувати до себе всі тіла, які перебувають поблизу її поверхні. У 1667 році Ньютон висловив припущення, що взагалі між усіма тілами діють сили взаємного притягання.
Сили
тяжіння (гравітаційні сили).
Взаємне притягання тіл називають
всесвітнім
тяжінням,
або гравітацією.
Сили, з якими будь-які два тіла притягуються
одне до одного, називаються силами
всесвітнього
тяжіння,
або гравітаційними
силами.
Вивчаючи рух небесних тіл і падіння
тіл в земних умовах, Ньютон встановив
закон
всесвітнього тяжіння,
згідно
якому матеріальні
точки притягуються одна до одної з
силою F, пропорційної їх масам m1
і m і
обернено пропорційної квадрату відстані
r між ними:
і
обернено пропорційної квадрату відстані
r між ними:

Закон справедливий також для випадків взаємодії куль і взаємодії великої кулі з малим тілом. При цьому під r слід розуміти відстань між центрами кульок.
Коефіцієнт
γ
= 6,67.
10-11 був
визначений експериментально і названий
гравітаційною
сталою.
Згідно формулі, гравітаційна стала
дорівнює вираженою в ньютонах силі
тяжіння між
двома
точковими масами в
1
кг
кожна, що знаходяться на відстані 1
м
один від одного.
був
визначений експериментально і названий
гравітаційною
сталою.
Згідно формулі, гравітаційна стала
дорівнює вираженою в ньютонах силі
тяжіння між
двома
точковими масами в
1
кг
кожна, що знаходяться на відстані 1
м
один від одного.
№12 Джерело гравітаційної взаємодії. Напруженість та потенціал поля точкової маси.
Напруженість та потенціал поля точкової маси. Ніщо у Всесвіті не може уникнути гравітації. Кожна частинка зазнає дії гравітації і сама є джерелом гравітації, спричинює гравітаційне притягання. Гравітація зростає в міру утворення все більших скупчень речовини. І хоч притягання одного атома мізерно мале, але сукупна сила притягання з боку всіх атомів може бути значною. Це виявляється й у повсякденному житті: ми відчуваємо гравітацію тому, що всі атоми Землі спільно притягають нас. Гравітаційна взаємодія між тілами здійснюється за допомогою поля тяжіння чи гравітаційного поля. Напруженість гравітаційного поля – це силова характеристика поля тяжіння. Вона чисельно дорівнює силі, що діє на одиницю маси точкового тіла, внесеного в дану точку поля:
![]()
У
гравітаційному полі Землі
![]() , звідки
, звідки
![]() де RЗ – радіус Землі, М – маса Землі, h
– відстань від центра тяжіння тіла до
поверхні Землі.
де RЗ – радіус Землі, М – маса Землі, h
– відстань від центра тяжіння тіла до
поверхні Землі.
При переміщенні тіла масою m на відстань dR поле тяжіння здійснює роботу:
![]()
При
переміщенні тіла з відстані R1 на відстань
R2:
![]()
Робота не залежить від траєкторії переміщен-ня, а визначається тільки початковим і кінцевим положеннями тіла. Отже, сили тяжіння консервативні, а поле тяжіння є потенціальним. Робота консервативних сил дорівнює зміні потенціальної енергії системи з протилежним знаком:
![]()
![]() Тому
потенціальна
енергія поля сил тяжіння дорівнює:
Тому
потенціальна
енергія поля сил тяжіння дорівнює:
Для будь-якого потенціального поля можна визначити скалярну енергетичну характеристику поля – потенціал:
![]()
Отже, потенціал поля тяжіння – це величина, яка не залежить від маси тіла m, а залежить тільки від маси M і відстані R від цього тіла до точки поля.
І![]() снує
взаємозв'язок між напруженістю поля
та його потенціалом:
снує
взаємозв'язок між напруженістю поля
та його потенціалом:
У загальному випадку для будь-якого потенціального поля між напруженістю і потенціалом існує зв'язок:
![]()
Знак "мінус" вказує на те, що вектор напруженості напрямлений в сторону спадання потенціалу.
№13 Гравітаційна взаємодія поблизу поверхні Землі.
Г равіта́ція
— це властивість масивних тіл
притягуватись одне до одного. Гравітація
є, зокрема, причиною земного тяжіння,
внаслідок якого предмети падають
додолу. Також орбіта Місяця навколо
Землі і Землі та інших планет навколо
Сонця визначається законами гравітації.
Повертаючись до закону всесвітнього
тяжіння і застосовуючи його до випадку
взаємодії земної кулі з тілами,
розташованими поблизу земної поверхні,
одержимо:
равіта́ція
— це властивість масивних тіл
притягуватись одне до одного. Гравітація
є, зокрема, причиною земного тяжіння,
внаслідок якого предмети падають
додолу. Також орбіта Місяця навколо
Землі і Землі та інших планет навколо
Сонця визначається законами гравітації.
Повертаючись до закону всесвітнього
тяжіння і застосовуючи його до випадку
взаємодії земної кулі з тілами,
розташованими поблизу земної поверхні,
одержимо:
де М — маса Землі, R — її радіус, т — маса тіла, h — його висота над земною поверхнею. Оскільки R»h, той вираз сили тяжіння тіл до Землі можна представити у вигляді:


З іншого боку де g — прискорення вільного падіння тіл поблизу земної поверхні. З формул (7) і (8) слідує, що

оскільки γ, М і R — постійні величини. Таким чином, із закону всесвітнього тяжіння виходить, що поблизу Землі всі тіла падають з однаковим прискоренням g ≈ 9,8l м/сек2. Інакше кажучи, завдяки обертанню Землі навкруги своєї осі величина прискорення g не є постійною, а дещо змінюється залежно від широти і висоти місця. Приведене значення g відповідає широті 45° на рівні моря. Прискорення вільного падіння – це прискорення, якого набуває тіло під дією сили тяжіння і яке чисельно дорівнює силі, з якою гравітаційне поле Землі діє на тіло масою 1 кг.
№14 Електрична взаємодія. Закон Кулона.
Закон Кулона — один з основних законів електростатики, який визначає величину та напрямок сили взаємодії між двома нерухомими точковими зарядами. Експериментально з задовільною точністю був вперше доведений Генрі Кавендішем у 1773, який використовував метод сферичного конденсатора, але його роботи не були опубліковані. В 1785 році закон був встановлений Шарлем Кулоном за допомогою спеціальних крутильних терезів.Електростатична сила взаємодії F12 двох точкових нерухомих зарядів q1 та q2 в вакуумі прямо пропорційна добутку абсолютних значень зарядів і обернено пропорційна квадрату відстані r12 між ними.
![]()
у векторній формі:
![]()
Сила
взаємодії направлена вздовж прямої,
що з'єднує заряди, причому однойменні
заряди відштовхуються, а різнойменні
притягуються. Сили, що визначаються
законом Кулона адитивні. Коефіціент
пропорційності
k
має назву електростатичної сталої та
залежить від вибору одиниць виміру.
Так в Міжнародній
системі одиниць СІ
k=1/(4πε0)
≈ 8,987742438
-987742438
·109
Н·м2·Кл-2,
де
![]() -
електрична
стала.
В системі СГСГ
одиниця
вимірювання
заряду обрана таким чином, що k=1.
Наступні умови є необхідними для
виконання сформульованого закону:
-
електрична
стала.
В системі СГСГ
одиниця
вимірювання
заряду обрана таким чином, що k=1.
Наступні умови є необхідними для
виконання сформульованого закону:
1.Точковість зарядів— відстань між зарядженими тілами має бути набагато більшою від розмірів тіл.
2.Нерухомість зарядів. В протилежному випадку потрібно враховувати магнітне поле заряду, що рухається.
В![]() однорідному
ізотропному середовищі сила взаємодії
між зарядами зменшується в ε разів:
однорідному
ізотропному середовищі сила взаємодії
між зарядами зменшується в ε разів:
де ε діелектрична проникність середовища.
Два роди зарядів
Наелектризовані тертям шматочок янтарю і шматочок скла притягаються один до одного, але шматочки янтарю один від одного відштовхуються, шматочки скла — теж. Підкреслюючи відмінність у наелектризованості янтарю і скла, спочатку умовно говорили про «смоляну» і «скляну» електрику, а потім янтар назвали зарядженим негативно, а скло — позитивно. Електризація тіл при терті в основному зумовлена збільшенням під час взаємного руху тіл площі їх поверхні контакту, з якої й відбувається обмін електричними зарядами між тілами. Електричним зарядом q (від англ. quantity — кількість) назвали кількісну міру здатності заряджених тіл до взаємодії. Одиницю заряду назвали кулоном — на честь Шарля Кулона, [q]= Кл. Вираз «заряд» часто вживають для позначення маленького зарядженого тіла чи зарядженої частинки.
№15 Джерело електричної взаємодії. Потенціал і напруженість поля точкового заряду.
Точковий
заряд q створює в точці спостереження
![]() електричне
поле з напруженістю
електричне
поле з напруженістю
![]()
Згідно з означенням електростатичного потенціалу
![]() .
.
В
середовищі потенціал зменшується в
![]() разів,
де
-
діелектрична стала.
разів,
де
-
діелектрична стала.
Напруженістю електричного поля називають фізичну векторну величину , що є силовою характеристикою електричного поля в кожній його точці і чисельно дорівнює відношенню сили, з якою поле діє на точковий заряд, поміщений у цю точку, до значення цього заряду. Напрям напруженості збігається з напрямом електричної сили, що діє на пробний позитивний заряд в цій точці:
![]()
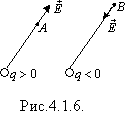
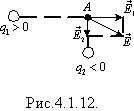
Вектор напруженості в будь-якій точці (А, В) електричного поля напрямлений вздовж прямої, що сполучає цю точку і заряд, від заряду, якщо q > 0, і до заряду, якщо q < 0 (рис. 4.1.6).
Із формул (4.1.5) і (4.1.6) знайдемо, що модуль напруженості електричного поля, створюваного точковим електричним зарядом,
![]()
Силові лінії електричного поля точкових зарядів незамкнені. Вони починаються на позитивних електричних зарядах і закінчуються на негативних (рис. 4.1.8 - 4.1.11). Віддалік від країв пластин силові лінії паралельні: електричне поле однакове у всіх точках.Завдяки принципу суперпозиції для знаходження напруженості поля системи заряджених частинок у будь-якій точці А досить знати вираз для напруженості поля точкового зарядженого тіла і додати вектори за правилом паралелограма:
Принцип суперпозиції (накладання) полів означає, що електричні поля під час накладання не впливають одне на одне.
№16 Принцип суперпозиції для гравітаційного та кулонівського поля.
Принцип суперпозиції – один із найзагальніших законів у багатьох розділах фізики. Найпростіше формулювання принципу суперпозиції звучить так: результат впливу на частинку кількох зовнішніх сил є просто сума резульаттів впливу кожної із сил. Найбільш відомий принцип суперпозиції в електростатиці, в якій він стверджує, що електростатичний потенціал, який створюється в даній точці системою зарядів, є сума потенціалів окремих зарядів. Підкреслимо, що електродинамічний принцип суперпозиції не є непорушним законом природи, а є усього лише наслідком лінійності рівнянь Максвелла, тобто рівнянь класичної електродинаміки. Тому, коли ми виходимо за межі застосовності класичної електродинаміки, цілком варто очікувати порушення принципу суперпозиції.
Якщо E→1(r→) — поле системи зарядів №1, а E→2(r→) — поле системи зарядів №2, то при наявності зарядів обох систем:
E→(r→) = E→1(r→) + E→2(r→).
Найпростіша система складається з одного заряду. Отже, електричне поле системи зарядів дорівнює сумі полів, створюваних кожним зарядом окремо, під час відсутності інших зарядів:
E→(r→) = ∑ j qj ∣r→ −r→j∣2 r→ −r→j ∣r→ −r→j∣ .
Тут
qj,r→j — заряд і радіус-вектор j-го заряду.
Правило додавання називають принципом
суперпозиції, а формула є наслідком
принципу суперпозиції і закону Кулона.
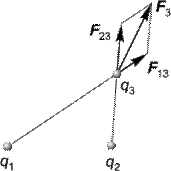
Досліди показують, якщо на електричний
заряд q діють одночасно електричні поля
декількох зарядів, то результуюча сила
дорівнює геометричній сумі сил, що
діють з боку кожного поля окремо. Ця
властивість електричних полів означає,
що ці поля підлягають принципу
суперпозиції: якщо в заданій точці
простору різні заряджені частинки
створюють електричні поля напруженістю
![]() ,
,![]()
![]() і т.д., то результуюча напруженість поля
в цій точці дорівнює геометричній сумі
напруженостей полів частинок, тобто:
і т.д., то результуюча напруженість поля
в цій точці дорівнює геометричній сумі
напруженостей полів частинок, тобто:![]()
Завдяки принципу суперпозиції для знаходження напруженості поля системи заряджених частинок у будь-якій точці А досить знати вираз для напруженості поля точкового зарядженого тіла і додати вектори за правилом паралелограма:
![]()
Принцип суперпозиції (накладання) полів означає, що електричні поля під час накладання не впливають одне на одне. Принцип суперпозиції дозволяє обчислити напруженість поля довільної системи зарядів, а не тільки точкових, зокрема і рівномірно зарядженої площини. За рівномірного розподілу електричного заряду q по поверхні площею S поверхнева густина заряду s є сталою і дорівнює:
![]()
У фізиці доведено, що напруженість електричного поля нескінченої площини з поверхневою густиною заряду s однакова в довільній точці простору і дорівнює:
![]()
№17 Фізичні властивості твердих тіл та рідин.
Під фізичними властивостями твердих тіл розуміється їх специфічна поведінка при впливі певних сил і полів. Існує три основних способи впливу на тверді тіла, відповідні трьом основним видам енергії: механічний, термічний і електромагнітний. Відповідно виділяють три основних групи фізичних властивостей.
Механічні властивості зв’язують механічні напруження і деформації тіла, які відповідно до результатів широких досліджень механічних і реологічних властивостей твердих тіл, виконаних школою академіка П. О. Ребіндера, можна поділити на пружні, міцнісні, реологічні і технологічні. Крім того, при впливі на тверді тіла рідин або газів виявляються їх гідравлічні і газодинамічні властивості.
До термічних відносять властивості, які виявляються під впливом теплових полів. До електромагнітних властивостей умовно можна віднести радіаційні, що проявляються при впливі на тверде тіло потоків мікрочастинок або електромагнітних хвиль значної жорсткості (рентгенівських, гамма-промені).
Рідина – конденсований агрегатний стан речовини, проміжний між твердим та газоподібним. Фізичне тіло, якому притаманна:
• а) плинність на відміну від твердого тіла;
• б) достатньо мала зміна об’єму (при зміні тиску й температури), на відміну від газу.
Збереження об’єму, густина, показник заломлення, теплота плавлення, в’язкість – властивості, які зближують рідини з твердими тілами, а незбереження форми – з газами. Для рідин характерний ближній порядок розташування молекул (відносна впорядкованість у розташуванні молекул найближчого оточення довільної молекули, подібна до порядку в кристалічних тілах, але на відстані кількох атомних діаметрів ця впорядкованість порушується). Взаємодія між молекулами рідини здійснюється Ван дер Ваальсовими і водневими зв’язками. Рідини, крім розсолів та зріджених металів, погані провідники електричного струму.
Плинність рідин пов’язана з періодичним “перестрибуванням” їхніх молекул з одного рівноважного положення в інше. Більшу частину часу окрема молекула рідини перебуває в тимчасовій асоціації з сусідніми молекулами (близька впорядкованість), де вона здійснює теплові коливання. Інколи рідиною в широкому розумінні слова називають і газ, при цьому рідину у вузькому змісті слова, яка задовольняє попереднім двом умовам, називають крапельною рідиною.
Форма, яку приймає рідина, визначається формою ємності, в якій вона перебуває. Частинки рідини (зазвичай молекули або групи молекул) можуть вільно переміщуватися по всьому її об'єму, але сила взаємного притягання не дозволяє частинкам залишати цей об'єм. Об'єм рідини залежить від температури і тиску і є постійним за даних умов.
№18 Маса. Зв'язок маси тіла з його вагою. Одиниці виміру маси і ваги.
Маса – міра інертності тіла. Маса зазвичай позначається латинською літерою m.
Поняття маси було введено у фізику Ньютоном, до цього дослідники оперували поняттям ваги. Ньютон визначив масу тіла як добуток його густини на об'єм. Ньютон ввів поняття маси у закони фізики: спочатку у другий закон Ньютона (через кількість руху), а потім — у закон всесвітнього тяжіння, звідки відразу випливає, що вага пропорційна масі.
Як міра інерційності тіла, маса входить у другий закон Ньотона, записаний у вигляді F= m*a,
де — m прискорення, а F — сила, що діє на тіло.
Одиницею вимірювання маси в системі CI є кілограм.
Вага́ — сила, з якою тіло діє на горизонтальну опору або на вертикальний підвіс внаслідок впливу сили тяжіння цього об'єкта. У гравітаційному полі Землі можна вважати з деяким наближенням, що вага тіла зв'язана з його масою співвідношенням F=mg , де F — вага, g — стала прискорення вільного падіння на Землі, а m— маса тіла.
Як будь-яка сила, вага в системі СІ вимірюється в ньютонах
№19 Терези. Типи терезів та вимірювання ваги.
Терези – прилад призначений для визначення маси тіла за силою тяжіння, що діє на них. Розрізняють терези зразкові, лабораторні (аналітичні, мікроаналітичні), та загального призначення. За принципом дії розрізняють терези важільні, пружинні, гідравлічні.
Головною частиною терез є коромисло. Коромисло терезів закріплюється точно посередині, так, що може гойдатися відносно горизонтальної осі. Шальки для зважуваних тіл підвішено на однаковій відстані від середини коро-мисла. Стрілка, з'єднана з коромислом, дає змогу визначити момент, коли терези зрівноважені.
Коли покласти на одну з шальок терезів якесь тіло, то ця шалька опуститься вниз. Якщо й на другу шальку покласти таке саме тіло, то коромисло займе горизонтальне положення. При цьому коромисло трохи погойдуватиметься так, що стрілка переходитиме через нульову позначку вліво і вправо. Рівновага настане тоді, ко-ли такі відхилення від нуля будуть одна-ковими.
При зважуванні використовується спеціальний набір важків (гир), маси яких точно відомі.
Для визначення ваги тіла можна скористатися динамометром або масу тіла помножити на сталу прискорення вільного падіння.
№20 Маса, як мірило інертності тіла. Другий закон Ньютона.
Будь-яке тіло під дією деякої сили змінює стан свого руху (чи відносного спокою) не миттєво. Немиттєвість зміни стану руху тіла під дією сили є проявом інертності тіла.
Інертність — це властивість тіл зберігати незмінною свою швидкість за умови відсутності зовнішньої дії. Явище збереження тілом при цьому своєї швидкості називається інерцією.
Кількісну міру інертності називають масою m, кг.
Чим більша маса тіла, тим більш воно інертне.
Інертна маса характеризує здатність тіла чинити опір зміні стану його руху під дією сили. За умови, що сила однакова, об'єкт з меншою масою легше змінює стан руху ніж об'єкт з більшою масою. Інертна маса фігурує у другому законі Ньютона.
Другий закон Ньютона: Прискорення матеріальної точки прямо пропорційне силі, яка на неї діє, та направлене в сторону дії цієї сили.
Математично це формулювання може бути записано так:
![]() або
або
![]() ,
де F — сила, яка діє на тіло, m — маса
тіла, a — прискорення, v — швидкість
,
де F — сила, яка діє на тіло, m — маса
тіла, a — прискорення, v — швидкість
mv — імпульс, який також позначається як
![]()
№21 Густина, як фізична характеристика речовини. Методи визначення густини.
Густина́
— маса тіла одиничного об'єму, є фізичною
характеристикою будь-якої речовини, з
якої складається тіло. Для випадку
однорідних тіл густина визначається
як відношення маси тіла до об'єму , який
воно займає. Таким чином, густина для
цього випадку запишеться як:
![]()
У випадку неоднорідних речовин, густина не є сталою в просторі тіла і визначається для його кожної точки окремо.
Густина вимірюється в кг/м³ в системі СІ.
Густину тіла можна визначити за формуою , попередньо зваживши тіло та вимірявши його об’єм(за законом архімеда або за допомогою штангенциркуля чи мікрометра в залежності від розмірів тіла).
№22 Закон Архімеда. Вплив сили Архімеда на результати вимірів ваги тіла.
Зако́н Архіме́да— основний закон гідростатики, згідно з яким на будь-яке тіло, занурене в рідину або газ, діє виштовхувальна сила, яка дорівнює вазі витисненої даним тілом рідини (газу) і за напрямом протилежна їй і прикладена у центрі мас витісненого об'єму рідини.
Якщо сила тяжіння тіла G більша виштовхувальної (Архімедової) сили Р, тобто G > P, то тіло тоне. Якщо G = P, то тіло знаходиться в спокої на тій глибині, на яку воно занурено(плаває). Якщо G< P, то тіло спливає, причому спливання припиниться тоді, коли виштовхувальна сила дорівнюватиме силі тяжіння тіла. Сила тяжіння рідини в об'ємі рівному об’єму зануреної в неї частини тіла називається водовантажністю, а центр ваги цього об'єму – центром водовантажності.

Формула
ваги витісненої рідини![]() ,
де g - прискорення вільного падіння, -
густина рідини, V - витіснений об'єм.
,
де g - прискорення вільного падіння, -
густина рідини, V - витіснений об'єм.
№23 Головна задача механіки. Система відліку. Система координат.
Механіка в загальному розумінні – наука про механічний рух та рівновагу тіл і взаємодію, що виникає при цьому між тілами. Відноситься механіка до природничих наук. Механіку поділяють на загальну механіку, механіку суцільних середовищ і прикладну механіку. В кожному з цих розділів розрізняють статику, кінематику й динаміку. До загальної механіки відносять аналітичну механіку, небесну механіку, балістику, теорію гіроскопів, теорію стійкості руху, а також теорію коливань, біомеханіку, теоретичну механіку тощо. Основу механіки суцільних середовищ становить гідроаеромеханіка, газова динаміка, механіка деформівного твердого тіла. До прикладної механіки відносять механіку ґрунтів і сипких тіл, будівельну механіку, опір матеріалів та ін.Засновником механіки є Ґ.Ґалілей. Основні закони динаміки встановив Ісаак Ньютон. Завданя механіки полягає у вивченні різних рухів та встановленні їх законів. Останні дають можливість наперед передбачати потрібні рухи і конструювати робочі механізми та машини., враховуючи масу тіл, зв’язки між ними та зовнішні діючі сили. Систе́ма ві́дліку — сукупність нерухомих одне відносно іншого тіл, відносно яких розглядається рух, і годинників, що відраховують час. Це одне з найважливіших понять, яке характеризує пізнавальний процес у фізиці. При вивченні фізичних систем і законів їх взаємодії необхідно встановити спосіб визначення положення, яке займає кожна система, і спосіб відліку моменту часу, який відповідає цьому положенню. Оскільки руху окремо взятого предмета не існує, то і його положення в певні моменти часу можна встановити тільки відносно якихось тіл, які в такому разі вважають за вихідні. Система відліку складається з вихідного тіла відліку (яке може довільно рухатися), пов'язаної з ним системи координат (напр., координатних осей х, у, z) з обраним початком для відліку просторового положення і з фіксованим початковим моментом для відліку часу, а також з відповідних вимірювальних засобів, зокрема масштабів і годинників. Всі просторово-часові характеристики набувають у природознавстві певного змісту (визначеності) лише відносно системи відліку. Координати на площині і в просторі можна вводити нескінченним числом різних способів. Вирішуючи ту або іншу математичну або фізичну задачу методом координат, можна використовувати різні координатні системи, вибираючи ту з них, в якій завдання вирішується простіше або зручніше в даному конкретному випадку
№24 Матеріальна точка (МТ). Визначення положення МТ у просторі, радіус-вектор.
Матеріа́льна то́чка — в фізиці, зокрема в механіці, тіло, розмірами якого можна знехтувати в умовах даної задачі. Положення об'єкта (матеріальної точки) визначається відносно фіксованої точки в просторі, яка називається початком координат. Воно може бути задано координатами цієї точки (наприклад, в Декартовій системі координат) або радіус-вектором r, проведеним з початку координат в цю точку. В реальності, матеріальна точка може рухатись з плином часу, тому радіус-вектор в загальному випадку є функцією часу. В класичній механіці, на відміну від релятивістської, вважається, що плин часу є однаковим в усіх системах відліку
№25 Характеристики руху. Середня та миттєва швидкість. Нормальне та тангенціальне прискорення. Одиниці виміру швидкості та прискорення.
Шви́дкість — фізична величина, що відповідає відношенню переміщення тіла до проміжку часу, за який це переміщення відбувалось. Швидкість — величина векторна, тобто вона має абсолютну величину і напрямок.
Швидкість здебільшого позначається літерою V.
У системі СІ швидкість (точніше її абсолютна величина) вимірюється в метрах за секунду — м/с. В системі СГС одиницею вимірювання швидкості є сантиметр за секунду — см/с. В повсякденному житті найпрактичнішою одиницею вимірювання швидкості є кілометр за годину — км/год. В певних областях людської діяльності використовуються специфічні одиниці швидкості, як, наприклад, вузол.
Середня
швидкість довільного руху за інтервал
часу
![]() — це векторна величина
— це векторна величина
![]()
де
![]() - переміщення тіла за час
- переміщення тіла за час
Після застосування граничного переходу вводиться означення миттєвої швидкості.
Миттєва швидкість нерівномірного руху — це вектор в точці, який є границею середніх швидкостей, коли інтервал часу прямує до нуля. Розкриваючи означення, швидкість — це відношення переміщення матеріальної точки за інтервал часу, коли цей інтервал прямує до нуля, тобто похідна:
![]()
Вектор швидкості спрямований по дотичній до траєкторії руху.
В свою чергу, похідна від швидкості дає миттєве прискорення тіла у момент часу t.
![]()
Прискорення векторна величина. Його напрямок не завжди збігається із напрямком швидкості. У випадку обертання вектор прискорення перпендикулярний до вектора швидкості. В загальному випадку вектор прискорення можна розкласти на дві складові. Складова вектора прискорення, яка направлена паралельно до вектора швидкості, а, отже, вздовж дотичної до траєкторії називається тангенціальним прискоренням. Складова вектора прискорення, що направлена перпендикулярно до вектора швидкості, а, отже, вздовж нормалі до траєкторії, називається нормальним прискоренням.
![]()
Перший член у цій формулі задає тангенціальне прискорення, другий - нормальне, або доцентрове. Зміна напрямку одиничного вектора завжди перпендикулярна до цього вектора, тому другий член в цій формулі нормальний до першого.
Тангенціальне прискорення визначає зміну швидкості за модулем. Тангенціальне прискорення напрямлене по дотичній до траєкторії руху в напрямі швидкості або проти, залежно від того збільшується чи зменшується величина швидкості. Нормальне (доцентрове) прискорення визначає зміну швидкості за напрямом.
Прискорення позначається зазвичай латинською літерою a, і його абсолютна величина вимірюється в системі СІ в метрах за квадратну секунду (м/с2). Існує також позасистемна одиниця Ґал (Gal), що використовується у гравіметрії і дорівнює 1 см/с2. Часто прискорення також вимірюють, вибираючи за одиницю прискорення вільного падіння, яке позначають латинською літерою g, тобто говорять, що прискорення складає, наприклад, 2g.
№26 Інерціальні системи. Перший закон Ньютона.
Інерціальними Ньютон назвав такі системи, для яких єдиним джерелом прискорення є сила, тобто взаємодія з іншими тілами. Системи відліку, які рухаються відносно інерціальних систем із прискоренням (поступально чи обертально), він назвав неінерціальними. Ньютон, розглядаючи інерціальну систему відліку (ІСВ), так і не зміг вказати тіло, яке б було для неї тілом відліку. Оточуючі тіла рухаються прискорено: дім обертається навколо осі Землі, а разом з її поверхнею навколо Сонця. Системи відліку, які пов'язані із оточуючими тілами, неінерціальні, але їх прискорення здебільшого є дуже малі. Прискорення автобуса становить близько 1 м/с2, великого корабля - кілька см/с2, Землі - 6 мм/с2, Сонця - близько 10-8 см/с2. Відповідно, чим більша маса тіла відліку, тим менше його прискорення. Тому ІСВ - це абстрактне поняття, якби вона існувала, то мала б нескінченно велику масу. Очевидно, що найбільшу масу з оточуючих нас тіл має Сонце, тому пов'язана з ним система відліку є майже інерціальною. У цій ІСВ початок відліку координат суміщають з центром Сонця, а координати осей проводять у напрямі до реальних зірок, які можна вважати нерухомими.
Визначивши роль системи відліку, сформулюємо перший закон Ньютона так: в інерціальній системі відліку матеріальна точка зберігає стан спокою або рівномірного прямолінійного руху, якщо на неї не діють інші тіла або дія зовнішніх тіл скомпенсована.
№27 Сила. Одиниці виміру сили. Прояви дії сили. Другий закон Ньютона.
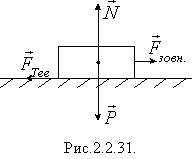
Си́ла — фізична величина, що характеризує ступінь взаємодії тіл. При дії незрівноваженої сили на фізичне тіло його рух змінюється, тобто тіло набуває прискорення.
Сила
є векторною величиною — крім числа, що
позначає більшу чи меншу дію, вона
характеризується ще й напрямком дії.
Силу здебільшого позначають латинською
літерою F,
де жирний шрифт вказує, що це вектор.
Вектор також позначають стрілочкою
![]() .
Абсолютна величина сили позначається
нежирним шрифтом: F.
.
Абсолютна величина сили позначається
нежирним шрифтом: F.
В системі СІ сила має розмірність: Н (Ньютон) = кг · м / с2. В системі СГС сила вимірюється в динах = г · см / с2.
Сила визначаєтья як кількісна характеристика взаємодії між тілами. Серед усіх типів взаємодії, що існують у природі, традиційно виділяють 4 види так званих фундаментальних взаємодій: гравітаційна, електромагнітна, сильна (ядерна) і слабка. Для опису двох із цих взаємодій, гравітаційної та електромагнітної, класична фізика використовує поняття сили.
Другий закон Ньютона:
Тіло, на яке діють сили рухається з прискоренням, величина і напрям якого визначаються відношенням рівнодійної всіх сил до маси тіла.
Математично це формулювання може бути записано так:
Або ,
якщо m — константа.
Де F — сила, яка діє на тіла, m — маса тіла, a — прискорення, v — швидкість, mv — імпульс, який також позначається як p
Це рівняння фактично означає, що чим більша за абсолютним значенням сила буде прикладена до тіла, тим більшим буде його прискорення. Параметр m або маса в цьому рівнянні — це насправді коефіцієнт пропорційності, який характеризує інерційні властивості об'єкта.
У рівнянні F=ma прискорення може бути безпосередньо виміряне, на відміну від сили. Тому цей закон має сенс, якщо ми можемо визначити силу F безпосередньо. Одним з таких законів, який визначає правило обчислення гравітаційної сили, є закон всесвітнього тяжіння.
№28 Центр інерції механічної системи. Особливості руху центра інерції замкненої механічної системи.
Центром мас, або центром інерції системи матеріальних точок називається точка С, радіус вектор якої визначається за формулою:
 ,
,
де
 – радіус-вектор 1-ї матеріальної точки,
– радіус-вектор 1-ї матеріальної точки,
 – радіус-вектор 2-ї і т.і.,
– радіус-вектор 2-ї і т.і.,
 –
загальна маса всієї системи. Якщо
радіус-вектори проведені з центра мас,
тобто з т.С, тоді:
–
загальна маса всієї системи. Якщо
радіус-вектори проведені з центра мас,
тобто з т.С, тоді:
 .
.
Отже, центр мас – це геометрична точка, для якої сума добутків мас усіх матеріальних точок, що утворюють дану механічну систему, на їх радіус-вектори, які проведені з цієї точки, дорівнює нулю.
Швидкість центра мас:
 =
= ,
а отже,
,
а отже,
 .
.
 .
.
Тобто, центр мас механічної системи рухається як матеріальна точка, в якій зосереджена вся маса системи і на яку діє рівнодійна прикладених до системи зовнішніх сил.
Центром мас або центром інерції системи називається геометрична точка С, положення якої характеризує розподіл мас у системі. Положення центра мас визначається радіус вектором , який для системи є дискретним розподілом мас і системи з неперервним розподілом описується формулами

m-маса всієї системи.

Імпульс
центра мас дорівнює повному імпульсу
системи. Рух центра мас тотожний з
поступальним рухом системи. Якщо на
систему діють зовнішні сили, то за
другим законом Ньютона отримуємо
рівняння руху центра масс.

Рух центра мас рухається як матеріальна точка, маса якої дорівнює сумарній масі всієї системи, а діюча сила-геометричній сумі всіх зовнішніх сил, які діють на систему. У замкненій системі імпульс центра мас зберігається:між матеріальними точками системи можуть діяти будь –які сили, система може обертатися,але центр мас системи рухається рівномірно прямолінійно.
Замкнена механічна система - це система тіл, на які не діють зовнішні сили.
Закон збереження імпульсу-імпульс замкненої системи зберігається за величиною й напрямком. Він випливає з третього закону Ньютона, який можна сформулювати ще й так: дія і-ої матеріальної точки на j-ту точку носить характер взаємодії; сили взаємодії чисельно рівні, їх вектори лежать на одній прямій і протилежні за напрямком Замкнена механічна система - це система тіл, на які не діють зовнішні сили.
Закон збереження імпульсу-імпульс замкненої системи зберігається за величиною й напрямком. Він випливає з третього закону Ньютона, який можна сформулювати ще й так: дія і-ої матеріальної точки на j-ту точку носить характер взаємодії; сили взаємодії чисельно рівні, їх вектори лежать на одній прямій і протилежні за напрямком
Замкнена механічна система ¾ це система тіл, на які не діють зовнішні сили.
Закон
збереження імпульсу ¾
імпульс замкненої системи зберігається
за величиною й напрямком. Він випливає
з третього закону Ньютона, який можна
сформулювати ще й так: дія і-ої матеріальної
точки на j-ту
точку носить характер взаємодії; сили
взаємодії чисельно рівні, їх вектори
лежать на одній прямій і протилежні за
напрямком
![]()
№29 Імпульс МТ та повний імпульс механічної системи. Закон збереження імпульсу.
Мірою механічного руху, яка визначає можливість передачі механічного руху від одного тіла до іншого, є кількість руху абоімпульс тіла Р. Імпульс тіла - це векторна фізична величина, напрям якої співпадає з напрямом швидкості v : Р=M*V.Повний імпульс системи тіл Р дорівнює векторний сумі імпульсів окремих тіл:
![]()
Якщо на систему тіл зовнішні сили не діють або вони врівноважені, то така система називається замкнутою,, для неї виконується закон збереження імпульсу: повний імпульс зсщгеиутої системи тіл залишається незмінним за будь-яких взаємодій тіл цієї системи між собою:
![]()
Будь-яких сильних взаємодіях тіл або їх частин, наприклад іостріл з рушниці і тому подібне, можна розглядати (йрчі тіла як замкнуту систему, оскільки сили взаємодії Ь більші за інші зовнішні сили.
Для замкнутої системи сума проекцій імпульсу на будь-який ; (координатну вісь) не змінюється:
![]()
це
застосовується при розв'язанні задач
на закон збере-^імпульсу. На законі
збереження імпульсу заснований ц
реактивного руху, що виникає при
відокремленні від тіла, одиться в стані
спокою, деякої його частини з якоюсь
швидкістю. За законом збереження
імпульсу:![]() або
або![]() тобто
друга частина тіла отримає такий же
самий імпульс, що і відокремлена
частина, тільки спря-гис.і.зи
мований протилежно. Це є прин-ивного
руху. Реактивний рух здійснюють,
наприклад,
тобто
друга частина тіла отримає такий же
самий імпульс, що і відокремлена
частина, тільки спря-гис.і.зи
мований протилежно. Це є прин-ивного
руху. Реактивний рух здійснюють,
наприклад,
№30 Третій закон Ньютона.
Взаємодія між матеріальними точками (тілами) визначається третім законом Ньютона: два тіла взаємодіють із силами рівними за величиною і напрямленими у протилежні боки вздовж прямої, яка з’єднує ці тіла. Тобто
 ,
,
де
 – сила, яка діє на перше тіло з боку
другого,
– сила, яка діє на перше тіло з боку
другого,
 – сила, яка діє на друге тіло з боку
першого.
– сила, яка діє на друге тіло з боку
першого.
Наприклад,
з якою силою тіло притягається д![]() о
Землі, з такою ж силою воно діє на Землю
(рис.1.9). Але, оскільки маси тіла та Землі
розрізняються у багато разів, то й
прискорення ці сили викликають різні
згідно із другим законом Ньютона. Тіло
падає з прискоренням в
о
Землі, з такою ж силою воно діє на Землю
(рис.1.9). Але, оскільки маси тіла та Землі
розрізняються у багато разів, то й
прискорення ці сили викликають різні
згідно із другим законом Ньютона. Тіло
падає з прискоренням в ільного
падіння
ільного
падіння
 ,
а Земля не рухається.
,
а Земля не рухається.
Треба пам’ятати, що сила дії та сила протидії хоч і однакові за величиною, але прикладені до різних тіл.
№31 Пружна деформація. Закон Гука. Модуль Юнга. Енергія деформованої пружини.
Пружна деформація - деформація, що не викликає незворотних змін у структурі тіла. При пружній деформації тіло повертає собі попередні розміри й форму при знятті напруження. Область фізики і розділ механіки суцільних середовищ, що вивчають пружні деформації називаються теорія пружності. Інші види деформації викликають незворотні зміни у структурі тіла. Сюди відносять: пластичну деформацію як миттєву так і в'язку (наприклад, повзучість). З погляду мікроскопічної будови твердого тіла, пружна дефомація виникає тоді, коли змінюються віддалі між атомами, проте кожен із атомів тіла залишається в своїй потенціальній ямі. При малих пружних деформаціях напруження, що виникають в тілі, пропорційні деформації. В цій області справедливий закон Гука. При збільшенні навантаження вище границі пропорційності лінійність може порушуватися, хоча деформація залишатиметься пружною.
Закон Гука
Пружність — це здатність деформованих тіл відновлювати початкові форму і об’єм за умови припинення зовнішньої дії. Сили пружності виникають при деформуванні тіл і напрямлені протилежно до сил, які викликають деформацію.
Закон Гука встановлює лінійну залежність між деформацією й механічними напруженнями.
Закон Гука справедливий для малих пружних деформацій.
Модуль сили Гука:
F упр = k | x |
Модуль Юнга
Модуль Юнга— це характеристика пружніх властивостей ізотропних матеріалів, один із модулів пружності. Позначається модуль Юнга латинською літерою E, вимірюється в паскалях (Па).

Модуль Юнга встановлює зв'язок між деформацією розтягу й механічним напруженням направленим на розтяг.
Енергія деформованої пружини. Енергія — це фізична величина, що показує, яку роботу може виконати тіло. Енергія позначається літерою Е. У Системі Інтернаціональній енергія вимірюється в джоулях (Дж). Чим більшу роботу може виконати тіло, тим більшу енергію воно має. При виконанні роботи енергія тіла змінюється.
Деформована пружина має запас потенціальної енергія пружної деформації. Для того, щоб деформувати пружину, необхідно виконати роботу. Ця робота дорівнює добутку сили на зміщення кінця пружини.
Тоді
робота, яку потрібно виконати для
деформації пружини для зміщення на
![]() ,
буде:
,
буде:
![]() .
.
Потенціальна енергія пружно деформованого тіла вимірюється тією роботою, яку тіло може здійснити. Отже,
![]() .
.
Потенціальна енергія пружно деформованої пружини дорівнює половині добутку коефіцієнта жорсткості пружини на квадрат зміщення точки прикладення сили.
№32 Робота та потенціальна енергія. Зв'язок сили з потенціальною енергією МТ. Розрахунок роботи.
Робо́та - фізична величина, яка визначає енергетичні затрати при переміщенні фізичного тіла, чи його деформації.
Р![]() обота
зазвичай позначається латинською
літерою A), в англомовній літературі -
W (від англ.
Work),
й має розмірність енергії. У системі
СІ
робота вимірюється в Джоулях.
обота
зазвичай позначається латинською
літерою A), в англомовній літературі -
W (від англ.
Work),
й має розмірність енергії. У системі
СІ
робота вимірюється в Джоулях.
![]()
Потенціа́льна ене́ргія — частина енергії фізичної системи, що виникає завдяки взаємодії між тілами, які складають систему, та із зовнішніми щодо цієї системи тілами, й зумовлена розташуванням тіл у просторі. Разом із кінетичною енергією, яка враховує не тільки положення тіл у просторі, а й рух, потенціальна енергія складає механічну енергію фізичної сиcтеми.
Потенціальна енергія матеріальної точки визначається як робота з її переміщення із точки простору, для якої визначається потенціальна енергія у якусь задану точку, потенціальна енергія якої приймається за нуль. Потенціальна енергія визначається лише для поля консервативних сил.
![]()
2.Через те, що механічна елементарна робота дорівнює:
![]() ,
,
та з, іншого боку, робота консервативних сил при елементарній зміні конфігурації системи дорівнює приросту потенціальної енергії, взятому зі знаком мінус, то робота здійснюється за рахунок зменшення потенціальної енергії:
![]() ,
,
тоді:
![]() .
.
Звідси:
![]() ,
,
де
![]() є
сталою інтегрування, тобто потенціальна
енергія визначається завжди з точністю
до деякого значення.
є
сталою інтегрування, тобто потенціальна
енергія визначається завжди з точністю
до деякого значення.
№33 Закон збереження енергії.
Ене́ргія — загальна кількісна міра руху і взаємодії всіх видів матерії. Енергія не виникає ні з чого і нікуди не зникає, вона може тільки переходити з одного вигляду в інший (закон збереження енергії). Поняття енергії зв`язує всі явища природи в одне ціле, є загальною характеристикою стану фізичних тіл і фізичних полів. В системі СІ енергія вимірюється в джоулях( Дж). Поняття енергії зв'язане зі здатністю тіла або системи виконати роботу. При цьому тіло або система частково втрачає енергію, витрачаючи її на зміни в навколишніх тілах.
Закон збереження енергії - закон, який стверджує, що повна енергія в ізольованих системах не змінюється з часом. Проте енергія може перетворюватися з одного виду в інший. У термодинаміці закон збереження енергії відомий також під назвою першого закону термодинаміки.
Закон збереження механічної енергії. У механіці закон збереження енергії стверджує, що в замкненій системі частинок, повна енергія, що є сумою кінетичної і потенціальної енергії не залежить від часу, тобто є інтегралом руху. Закон збереження енергії справедливий тільки для замкнених систем, тобто за умови відсутності зовнішніх полів чи взаємодій.
Сили взаємодії між тілами, для яких виконується закон збереження механічної енергії називаються консервативними силами. Закон збереження механічної енергії не виконується для сил тертя, оскільки за наявності сил тертя відбувається перетворення механічної енергії в теплову.
Закон збереження енергії в термодинаміці. У термодинаміці закон збереження енергії встановлює співвідношення між внутрішньою енергією тіла, кількістю теплоти, переданою тілу і виконаною роботою.
Термодинаміка вивчає здебільшого нерухомі тіла, кінетична і потенціальна енергія яких залишається незмінною. Однак, ці тіла можуть виконувати роботу над іншими тілами, якщо, наприклад, змінювати їхню температуру. Отже, оскільки нагріте тіло може виконувати роботу, воно має певну енергію. Ця енергія отримала назву внутрішньої енергії. З точки зору фізики мікросвіту - фізики атомів і молекул, внутрішня енергія тіла є сумою кінетичних і потенціальних енергії частинок, з яких це тіло складається. Однак, з огляду на велику кількість та малі розміри частинок і загалом невідомі закони їхньої взаємодії, внутрішню енергію тіла визначити важко, виходячи з його будови. Проте очевидно, що вона залежить від температури тіла.
Визначальним моментом для встановлення закону збереження енергії стало встановлення еквівалентності між теплом, кількісною характеристикою якого є кількість теплоти, і механічною роботою. Якщо тілу надати певну кількість теплоти Q, то частина її піде на виконання механічної роботи A, а частина на збільшення внутрішньої енергії тіла:
![]() ,
,
Ця формула складає основу першого закону термодинаміки.
Аналогічним чином при виконанні механічної роботи, частина енергії втрачається у вигляді тепла, тобто йде на підвищення температури тіла й навколишнього середовища.
Загалом сумарний притік енергії в систему мусить дорівнювати сумарному відтоку енергії з системи, плюс зміна енергії тіл, з яких складається сама система. Іншими словами, енергія може бути перетворена з одної форми в іншу, але не може бути створена чи знищена.
Закон збереження енергії виключає можливість створення вічного двигуна першого роду.
Перетворення енергії. Енергія одного виду може перетворюватися в енергію іншого виду, наприклад, хімічна енергія може перетворюватися в теплову, а теплова енергія в механічну тощо.
В молекулі хімічної сполуки атоми зв'язані між собою хімічними зв'язками. Для того, щоб розірвати хімічний зв'язок потрібно затратити певну енергію, значення якої визначається типом зв'язку. В одних молекулах енергія зв'язку більша, в інших менша. Так, енергія зв'язку в молекулі вуглекислого газу СО2 більша, ніж сумарна енергія атома карбону у вугіллі й атомів оксигену в молекулі кисню O2. Тому можлива хімічна реакція горіння, внаслідок якої утворюється вуглекислий газ, а залишки хімічної енергії передаються поступальному, тепловому руху молекул, тобто перетворюються в тепло. Виділене внаслідок горіння тепло можна використати, наприклад, для нагріву пари в паровій турбіні, яка, обертаючись, створює електрорушійну силу в генераторі, продукуючи електроенергію. Електроенергія може, в свою чергу використовуватися для виконання механічної роботи, наприклад, підйому ліфта, або ж для освітлення, де електрична енергія перетворюється в енергію електромагнітних хвиль – світла.
№34 Однорідне силове поле. Рух МТ в однорідному силовому полі.
Силове поле - це векторне поле в просторі, в кожній точці якого на пробну частку діє визначена за величиною і напрямком сила (вектор сили). Розрізняють стаціонарні поля, величина і напрям яких можуть залежати виключно від координат x, у, z точки дії сили, і нестаціонарні силові поля, що залежать також від моменту часу t, в який відбувається дія. Виділяють також однорідне силове поле, для якого сила, що діє на пробну частку, постійна у всіх точках простору.
Однорідне силове поле - силове поле, в будь-якій точці якого сила поля для даної матеріальної точки має одне і те ж значення.
№35 Сили тертя. Сухе та грузле тертя. Рух твердого тіла по похилій площині.
Сила тертя - це сили, що виникають у процесі руху одних тіл або їхніх частин по поверхні інших. Вони напрямлені по дотичній до поверхонь тіл і перешкоджають відносному переміщенню їх. Сила тертя виникає лише в макроскопічних системах, де внаслідок хаотичного руху атомів відбувається незворотній процес розсіяння енергії макроскопічного руху складових системи в енергію мікроскопічного руху атомів та молекул. Сила тертя завжди направлена проти вектора швидкості. Сила тертя не належить до потенціальних сил.
Коли тіло рухається в газі чи рідині, сила тертя пропорційна швидкості, при великих швидкостях — квадрату швидкості.
Коефіцієнт тертя́ — це величина, що характеризує силу тертя і зазвичай позначається μ, k або f. У залежності від виду тертя відрізняють і відповідний коефіцієнт тертя. Залежить від властивостей тертьових поверхонь тіл.
Сухе тертя (зовнішнє) - це тертя, що виникає при відносному перміщенні тіл, які дотикаються. Характерна риса сухого тертя — наявність значної сили тертя спокою. Тертя, що виникає при відносному русі між твердим тілом і рідинним або газовим середовищем, а також між шарами цих середовищ називають внутрішнім або в’язким тертям. Зовнішнє тертя поділяють на тертя спокою – виникає між взаємно нерухомими тілами; та тертя руху – виникає при відносному переміщенні тіл, що дотикаються. Залежно від характеру відносного переміщення тіл, розрізняють тертя кочення і ковзання. Тертя сопкою – сухе тертя між взаємно нерухомими тілами.
Тертя ковзання:
FT=k(Pn+Sp0)
Де k –коефіцієнт тертя; p0- додатковий тиск обумовлений силами молекулярного притягання; S- сумарна площа взаємодіючих поверхонь між тілами; Pn – нормальний тиск.
Тертя кочення:
FT=k Pn/r
Де r – радіус тіла кочення.
Сила внутрішнього тертя є результатом дії сил молекулярного зчеплення на межі двох шарів і переходу молекул з одного шару в інший. За другим законом механіки зміна кількості руху шару рідини за одиницю часу визначає силу, що діє на нього, тобто силу внутрішнього тертя.
Сила тертя в’язкого:
-При невеликих швидкостях F=-kυ,
-при більших швидкостях лінійна залежність переходить у квадратичну, при яких швидкість тертя залежить від розмірів і форми тіла:F=-kυ2,
-Для сферичних тіл, що рухаються у в’язких середовищах, використовують формулу Стокса: F=6πrnυ,
де r – радіус кульки, n - в’язкість середовища.
Сили тертя спокою, а іноді сили тертя ковзання мають значення при передаванні руху від одного тіла до іншого. Внаслідок сили тертя сопкою не зазнають руйнування споруди, машини та механізми, які скл. зі значної кількості елементів та деталей.
Рух твердого тіла по похилій площині
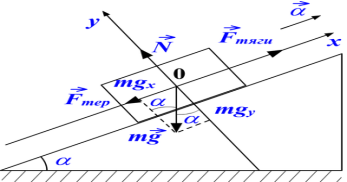
Коли
тіло рухається вздовж похилої площини,
чи знаходиться на ній в стані спокою,
коефіцієнт тертя дорівнює тангенсу
кута нахилу похилої площини:
![]()
№36Поступальний та обертальний рухи твердого тіла (ТТ). Кутова швидкість та кутове прискорення.
Тверде тіло — агрегатний стан речовини, що характеризується стабільністю форми на відміну від інших агрегатних станів рідини та газу.
Поступальний рух — рух, при якому всі точки тіла або системи матеріальних точок переміщуються паралельними траєкторіями. Внаслідок поступального руху тіла усі його точки рухаються з однаковими швидкостями і прискореннями, тому для вивчення такого руху досить вивчити рух однієї точки, що належить даному тілу. Рух ізольованої матеріальної точки поступальний за означенням. Наприклад, рух поїзда по всьому шляху.
Рух абсолютно твердого тіла можна подати у вигляді суми поступального руху й обертання.
В загальному випадку довільної системи матеріальних точок рух можна подати у вигляді поступального руху і відносного руху точок системи одна щодо іншої.
В класичній механіці поступальний рух задовільняє рівнянню:
![]() ,
де
,
де
![]() —
сумарний імпульс
усіх тіл механічної системи,
—
сумарний імпульс
усіх тіл механічної системи,
![]() -
сумарна сила.
-
сумарна сила.
Обертальний рух – це рух,при якому всі частинки твердого тіла переміщуються по колах, центри яких лежать на нерухомій площині, що називається віссю. При обертальному русі всі частини тіла переміщуються з різними лінійними швидкостями, але всі вони мають однакові кутові швидкість та прискорення, які є характеристиками обертального руху.
Кутова́ шви́дкість — відношення зміни кута при обертанні до відрізку часу, за який ця зміна відбулася.
![]()
Вимірюється в радіанах за секунду. Оскільки зростання кута відраховується проти годинникової стрілки, то кутова швидкість додатня при обертанні проти годинникової стрілки і від'ємна при обертанні за годинниковою стрілкою. Якщо зміна кута нерівномірна, то вводиться миттєва кутова швидкість:
![]()
Кутове прискорення - похідна від кутової швидкості по часу.
![]()
де
β-
кутове прискорення,
![]() -
кутова швидкість, t - час. Вимірюється
в рад/c2.
-
кутова швидкість, t - час. Вимірюється
в рад/c2.
Кутове прискорення зване з тангенціальними прискоренням: аt=βr. Може бути ознакою різних видів обертальних рухів точки: 1)β=0 – рівномірний обертальний рух; 2)β=const – рівнозмінний обертальний рух.
№37 Момент інерції твердого тіла. Моменти інерції тіл найпростішої форми.
Моме́нт іне́рції тіла відносно даної осі(одиниця виміру в системі СІ [кг*м2]) – склярна величина, яка дорівнює сумі добутків мас частинок на квадрати їхніх відстаней від осі ообертання.
J=∑miri2, добуток miri2 – момент інерції окремої частинки відносно осі обертання. Тобто момент інерції системи тіл відносно осі обертання дорівнює сумі моментів інерції складових частин системи відносно даної осі. Під моментом інерції розуміють міру інертності тіла при обертальному русі. Кожне тіло має конкретне значення моменту інерції відносно конкретної осі обертання. 1. Порожнистий товстостінний циліндр масою m та радіусами R1 та R2 відносно геометричної осі: J=(m*( R12+ R22))/2; порожнистий тонкостінний циліндр масою m та радіусом оболонки R відносно геометричної осі: J=mR2; суцільний циліндр масою m та радіусом оболонки R відносно геометричної осі: J=mR2/2; куля масою m та радіусом R, відносно осі, що проходить через центр кулі: J=2/5 mR2; стержень масою m і завдовжки l, відносно осі перпендикулярної до середини стержня: J=1/12 ml2; той самий стержень відносно осі перпендикулярної до кінця стержня: J=1/3 ml2.
Теорема Гюйгенса-Штейнера
Якщо
відомий момент інерції тіла відносно
осі, що проходить через центр його мас,
то момент інерції відносно будь-якої
іншої осі, що паралельна до даної
визначається теоремою Штейнера (теоремою
Гюйгенса-Штейнера): момент інерції тіла
J відносно довільної осі дорівнює сумі
моменту інерції цього тіла Jc
відносно осі, що проходить через центр
маси тіла паралельно до осі, що
розглядається, і добутку маси тіла m на
квадрат відстані d між осями:
![]()
№38 Теорема Штейнера.
Теорема Гюйгенса-Штейнера
Якщо відомий момент інерції тіла відносно осі, що проходить через центр його мас, то момент інерції відносно будь-якої іншої осі, що паралельна до даної визначається теоремою Штейнера (теоремою Гюйгенса-Штейнера): момент інерції тіла J відносно довільної осі дорівнює сумі моменту інерції цього тіла Jc відносно осі, що проходить через центр маси тіла паралельно до осі, що розглядається, і добутку маси тіла m на квадрат відстані d між осями:
Моментом інерції механічної системи відносно непорушної вісі а називається фізична величина І, яка дорівнює добутку мас матеріальних точок системи на квадрати їх відстані від вісі.
Іа=∑ri2mi
Момент інерції тіла: Іа=∫r2dm=∫ r2pdV,
де p-плотність тіла,
dV – елементарний обсяг
№39 Основні кінематичні характеристики коливань.
№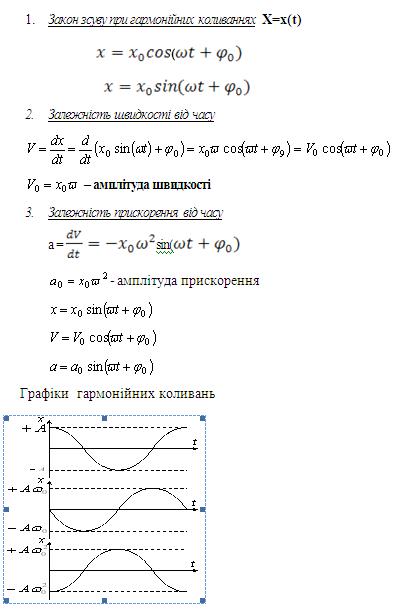 40
Пружинний маятник. Виведення
диференціального рівняння коливань
для пружинного маятника.
40
Пружинний маятник. Виведення
диференціального рівняння коливань
для пружинного маятника.
Пружинний
маятник — це тіло масою m, закріплене
на пружині, жорсткість якої k і яке
коливається під дією сили пружності.















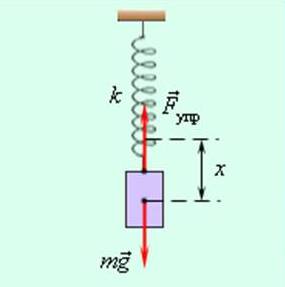
Період коливання пружинного маятника:
![]()
де m — маса; k — коефіцієнт пружності (жорсткість).
№41 Фізичний маятник. Виведення диференціального рівняння коливань для фізичного маятника.
Фізи́чний ма́ятник — тверде тіло довільної форми, яке під дією сили тяжіння здійснює коливання навколо нерухомої горизонтальної осі, що не проходить через центр маси тіла.
Рух фізичного маятника складний. У загальному випадку його можна розділити на коливання і обертання центра маси щодо вісі і власне обертання.
Зведена довжина фізичного маятника - довжина такого математичного маятника, період коливань якого збігається з періодом коливань данного фізичного маятника.
Диф, рівнянням коливань такого тіла називається диф. рівняння другого порядку, що є наслідком основного закону динаміки, застосованого для опису коливального руху.
Вирішенням цього диф. рівняння є залежність зсуву коливальної системи від положення рівноваги для будь-якого моменту часу.
Повернення
тіла в положення рівноваги відбувається
під дією сили тяжіння(mg).
Оскільки центр тяжіння тіла рухається
по дузі кола радіусу 
 ,
запишемо
основний закон динаміки для даного
випадку: M=I
,
запишемо
основний закон динаміки для даного
випадку: M=I
 ,де
M-
момент
сили, I-
момент інерції сили,
,де
M-
момент
сили, I-
момент інерції сили, 
 -
кутове
прискорення
-
кутове
прискорення
За
визначенням: M-mg

 ,
d-
плече
сили.
,
d-
плече
сили.
d=
 sin
sin
 ,
M=-mg
,
M=-mg
 sin
sin
За
визначенням:
 Досліди
показують, що коливання є гармонійними,
якщо кут відхилення а є малим, тобто не
перевищує 10°.
У разі малих кутів можна записати
sin
=
(рад)
Досліди
показують, що коливання є гармонійними,
якщо кут відхилення а є малим, тобто не
перевищує 10°.
У разі малих кутів можна записати
sin
=
(рад)

 -диф.
рівняння гармонічних коливань
-диф.
рівняння гармонічних коливань
Вирішення
цього рівняння має вид гармонійної
функції, тобто записується у вигляді :
:

Представимо одне з цих рішень в диф. рівняння і з тотожності знайдемо циклічну частоту коливань фізичного маятника.




 ®
® циклічна
частота коливання фізичного маятника
циклічна
частота коливання фізичного маятника

№42 Математичний маятник. Виведення диференціального рівняння коливань для математичного маятника.
Математи́чний ма́ятник — теоретична модель маятника, в якій матеріальна точка масою m підвішена на невагомому нерозтяжному стержні довжини l і здійснює рух в вертикальній площині під впливом сил тяжіння з прискорення мвільного падіння g.
Модель нехтує розмірами тіла, деформацією підвісу та тертям в точці підвісу стержня. Звичайно розглядаються коливання маятника в одній площині. В загальному випадку, якщо відхилити маятник від положення рівноваги та штовхнути його вбік, рух маятника буде складатися з коливань в вертикальних площинах та руху в горизонтальних.
I=m
 =
=

 -для
математичного маятника
-для
математичного маятника
№43 Принцип суперпозиції. Резонанс.
При́нцип
суперпози́ції -
одна із фундаментальних засад квантової
механіки.
Згідно з принципом суперпозиції, якщо
квантова система може знаходитися в
станах ![]() і
і ![]() ,
то вона може знаходитися також і в
стані
,
то вона може знаходитися також і в
стані ![]() ,
де
,
де ![]() та
та ![]() -
будь-які комплексні
числа.
-
будь-які комплексні
числа.
Принцип суперпозиції дуже незвичне твердження для людини, вихованої на класичній фізиці, але його потрібно збагнути для того, щоб розуміти квантову механіку.
Розглянемо,
наприклад, частку, яка в одному стані
має імпульс ![]() (позначимо
його кет-вектором
(позначимо
його кет-вектором ![]() ),
а в іншому імпульс
),
а в іншому імпульс ![]() (позначимо
його
(позначимо
його ![]() ).
Згідно із принципом суперпозиції дана
частка може також перебувати, наприклад,
у стані
).
Згідно із принципом суперпозиції дана
частка може також перебувати, наприклад,
у стані ![]() .
Яким у такому випадку буде імпульс
частинки? Висновок квантової механіки
полягає в тому, що імпульс в такому
стані невизначений. Якщо його виміряти,
то можна з одинаковою ймовірністю
отримати або значенння
,
або ж значення
.
.
Яким у такому випадку буде імпульс
частинки? Висновок квантової механіки
полягає в тому, що імпульс в такому
стані невизначений. Якщо його виміряти,
то можна з одинаковою ймовірністю
отримати або значенння
,
або ж значення
.
Таким чином, приходимо до важливого для квантової механіки висновку, що для квантової системи значення фізичної змінної може бути невизначеним.
Резона́нс — явище сильного зростання амплітуди вимушеного коливання у разі, коли частота зовнішньої сили збігається з власною частотою коливань.
Характеристики та опис
Резонанс характеризують інтенсивністю, напівшириною спектральної лінії та добротністю. Здебільшого резонанс наближено описують кривою Лоренца
![]() ,
,
де ω — частота зовнішньої сили, ω0 — частота власного коливання, Γ — стала затухання, яку називають також шириною лінії. Часто приводиться також γ= Γ/2 — півширина лінії.
Застосування
Явище резонансу широко використовується в науці й техніці. На ньому ґрунтується робота багатьох радіотехнічних схем та пристроїв, таких як коливні контури. Використовуючи явище резонансу ми вибираємо із багатого різноманіття електромагнітних хвиль в просторі навколо нас саме ті, які відповідають нашій улюбленій радіостанції, вибираємо телевізійний канал тощо.
П роте
не завжди резонанс корисний. Відомі
випадки, коли навісні мости ламалися
при проходжені по ним солдат "в ногу".
Це відбувалося через те, що частота
власних коливань полотна моста збігалася
з частотою ходи людей
роте
не завжди резонанс корисний. Відомі
випадки, коли навісні мости ламалися
при проходжені по ним солдат "в ногу".
Це відбувалося через те, що частота
власних коливань полотна моста збігалася
з частотою ходи людей
№44Автоколивання. Хвилі в пружному середовищі.
Автоколива́ння — коливання, амплітуда і період яких залежать від властивостей самої системи і не залежать від початкових умов, наприклад від початкового запасу енергії. Цим автоколивання відмінні від власних і вимушених коливань.
Системи, в яких можливі автоколивання, називаються автоколивальними.
Види автоколивних систем
До автоколивальних систем відносяться ламповий генератор незгасаючих коливань, годинник, парова машина та інші. В кожній автоколивальній системі є постійне (не коливальне)джерело енергії (батарея акумуляторів лампового генератора, пружина або гиря годинника та ін.).
Втрати енергії в автоколивальній системі компенсуються лише надходженням енергії від джерела. Важливим є те, що автоколивальна система сама регулює надходження енергії від джерела і підтримує установлений режим коливань.
Якщо коливне тіло (камертон, струна, мембрана і т.д.) перебуває в пружному середовищі, то воно приводить у коливальний рух дотичні з ним частки середовища, внаслідок чого в прилягаючих до цього тіла елементах середовища виникають періодичні
деформації (наприклад, стиску й розтягання). При цих деформаціях у середовищі з'являються пружні сили, що прагнуть повернути елементи середовища до первісних станів рівноваги; завдяки взаємодії сусідніх елементів середовища, пружні деформації будуть передаватися від одних ділянок середовища до інших, більш віддалених від коливного тіла.
Таким чином, періодичні деформації, викликані в якому-небудь місці пружного середовища, будуть поширюватися в середовищі з деякою швидкістю, що залежить від її фізичних властивостей. При цьому частки середовища роблять коливальний рух близько положень рівноваги. Від одних ділянок середовища до інших передається тільки стан деформації.
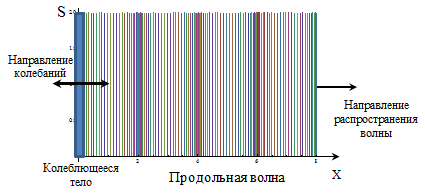 Процес поширення
коливального руху в середовищі
називається хвильовим
процесом або
просто хвилею.
Залежно від характеру виникаючих при
цьому пружних деформацій розрізняють
поздовжні й поперечні хвилі. У
поздовжніх хвилях частки
середовища коливаються уздовж напрямки
поширень коливань. У
поперечних хвилях частки середовища
коливаються перпендикулярно напрямку
поширення хвилі.
Процес поширення
коливального руху в середовищі
називається хвильовим
процесом або
просто хвилею.
Залежно від характеру виникаючих при
цьому пружних деформацій розрізняють
поздовжні й поперечні хвилі. У
поздовжніх хвилях частки
середовища коливаються уздовж напрямки
поширень коливань. У
поперечних хвилях частки середовища
коливаються перпендикулярно напрямку
поширення хвилі.
Рідкі й газоподібні середовища не мають пружності зсуву, тому в них збуджуються тільки поздовжні хвилі, що поширюються у вигляді стисків, що чергуються, і розряджень. Хвилі, порушувані на поверхні води, є поперечними, вони зобов'язані своїм існуванням земному притяганню.
У твердих тілах можуть бути викликані й поздовжні й поперечні хвилі.
Припустимо, що точкове джерело хвилі почало збуджувати в середовищі коливання в момент часу t = 0; по витіканню часу t це коливання пошириться по різних напрямках на відстань r =vit, деvi - швидкість хвилі в даному напрямку. Поверхня, до якої доходить коливання в деякий момент часу, називається фронтом хвилі. Форма фронту хвилі визначається конфігурацією джерела коливань і властивостями середовища. В однорідних середовищах швидкість поширення хвиля скрізь однакова. Середовище називається ізотропним, якщо ця швидкість однакова в усіх напрямках. Фронт хвиля від точкового джерела коливань в однорідному й ізотропному середовищі має вигляд сфери; такі хвилі називаються сферичними.
У неоднорідній і не ізотропному (анізотропному) середовищу, а також від неточкових джерел коливань фронт хвилі має складну форму. Якщо фронт хвилі являє собою площину й ця форма зберігається в міру поширення коливань у середовищі, то хвилю називають плоскою.
Поверхні хвилі, точки яких коливаються в однакових фазах, називаються хвильовими або фазовими поверхнями.
Графік, що показує розподіл у середовищі коливної величини в даний момент часу, називають формою хвилі.
№45Акустика. Звукові хвилі. Природа, характеристика звуку.
Аку́стика - у вузькому значенні слова — вчення про звук, тобто про пружні коливання та хвилі в газах, рідинах і твердих тілах, чутних людським вухом (частоти таких коливань знаходяться в діапазоні від 16 Гц до 20 кГц); у широкому сенсі — область фізики, що досліджує пружні коливання та хвилі від найнижчих частот (умовно від 0 Гц) до гранично високих частот 1012 — 1013 Гц, їхньої взаємодії з речовиною і застосування цих коливань (хвиль).
Звукові хвилі (акустичними хвилями) — це повздовжні хвилі: вони складаються із частинок, що коливаються вздовж напряму поширення хвилі, створюючи області високого і низького тиску (області розрідження і стиску). Вони можуть поширюватися в твердих тілах, рідинах і газах і мають широкий діапазон частот.
Розділ фізики, в якому вивчаються звукові хвилі(збудження, поширення, сприймання та взаємодія їх з речовиною середовища), називається акустикою. Акустика поділяється на загальну і прикладну. У загальній акустиці розглядаються теоретичні та експериментальні аспекти утворення і поширення звукових, ультразвукових та інфразвукових хвиль і взаємодія їх з речовиною. Здебільшого цей розгляд проводиться в припущенні, що амплітуди коливання не значні. Це дає можливість користуватися лінійними диференціальними рівняннями з частинними похідними. Хвилі великих амплітуд, які виникають при вибухах, горінні тощо, описуються нелінійними диференціальними рівняннями. Це призвело до розвитку нелінійної акустики. Прикладна акустика поділяється на фізіологічну, архітектурну, мучну, гідроакустичну.
П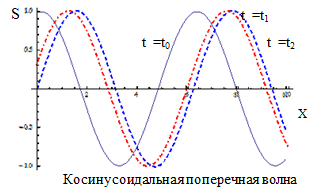 ружні
хвилі, що поширюються у суцільних
середовищах. Називаються звуковими.
До звукових належать хвилі, частоти
яких лежать у межах сприймання органами
слуху. Характеристиками
звуку є частота, довжина
хвилі, амплітуда і швидкість,
а також тембр.
Звичайно
людина чує
коливання,
передані по повітрю, у діапазоні частот
від 16—20 Гц до
15—20 кгц[2].
Звук нижче діапазону чутності людини
називають інфразвуком1;
вище: до 1 ГГц, — ультразвуком,
від 1 ГГц — гіперзвуком.Сприйняття
за допомогою слуху створює акустичний
простір, центр якого в кожен даний
момент перебуває там, де перебуває
джерело звуку, — на відміну від
візуального простору, центром якого є
кожна сприймаюча за допомогою зору
людина.Серед вловимих звуків варто
особливо виділити фонетичні, мовні
звуки й фонеми (з
яких складається усне мовлення)
і музичні
звуки (з
яких складається музика).Розрізняють
поздовжні й поперечні звукові хвилі
залежно від співвідношення напрямку
поширення хвилі й напрямки механічних
коливань часток середовища поширення.
ружні
хвилі, що поширюються у суцільних
середовищах. Називаються звуковими.
До звукових належать хвилі, частоти
яких лежать у межах сприймання органами
слуху. Характеристиками
звуку є частота, довжина
хвилі, амплітуда і швидкість,
а також тембр.
Звичайно
людина чує
коливання,
передані по повітрю, у діапазоні частот
від 16—20 Гц до
15—20 кгц[2].
Звук нижче діапазону чутності людини
називають інфразвуком1;
вище: до 1 ГГц, — ультразвуком,
від 1 ГГц — гіперзвуком.Сприйняття
за допомогою слуху створює акустичний
простір, центр якого в кожен даний
момент перебуває там, де перебуває
джерело звуку, — на відміну від
візуального простору, центром якого є
кожна сприймаюча за допомогою зору
людина.Серед вловимих звуків варто
особливо виділити фонетичні, мовні
звуки й фонеми (з
яких складається усне мовлення)
і музичні
звуки (з
яких складається музика).Розрізняють
поздовжні й поперечні звукові хвилі
залежно від співвідношення напрямку
поширення хвилі й напрямки механічних
коливань часток середовища поширення.
№46 Інфразвук, ультразвук, гіперзвук.
Ультразвук — це звукові хвилі частотою більше 20 000 Гц, вони не сприймаються вухом людини. Ці хвилі сприймають і випромінюють кажани, дельфіни та інші морські тварини.
Ультразвук використовується в медицині для ультразвукового обстеження (сканування) людського тіла, жир і м'язи по-різному відбивають ультразвукові хвилі. Відбиті хвилі перетворюються в електричні імпульси, утворюють зображення на екрані. В техніці ультразвукова дефектоскопія (наприклад, дефекти в рейках, тощо).
Ультразвук широко використовуються в багатьох галузях промисловості Джерелами таких коливань є генератори, які працюють в діапазоні частот від 12 до 22 кГц для обробки рідких розплавів, очищення відливок, в апаратах для очищення газів В гальванічних цехах ультразвук виникає під час роботи очищувальних та знежирювальних ванн . Його вплив спостерігається на віддалі 25-50 м від обладнання
Інфразвук - пружні хвилі, аналогічні звуковим, але з частотами нижче рівня сприйняття людського вуха (від 0,001 Гц до 16 Гц). Цей частотний діапазон використовується в сейсмографах для визначення землетрусів. Інфразвукові хвилі характеризуються можливістю долати великі відстані та оминати об'єкти з малим поглинанням.
Виявлено , що інфразвук негативно впливає на організм людини і оточуюче середовище. Це зумовлене тим, що частота інфразвуку збігається з власною частотою предмета, а це, як відомо — явище резонансу. Хвилі різної частоти негативно впливають на людські органи. Виникає під час землетрусу, бурі, урагану та інших стихійних лих.
Техногенним джерелом інфразвуку може бути потужне обладнання, транспорт, гірничі розробки за допомогою вибухів. Забруднення інфразвуком навколишнього середовища необхідно враховувати при будівництві вітрових електростанцій. Виробничий інфразвук виникає за рахунок тих же процесів що і шум чутних частот. Найбільшу інтенсивність інфразвукових коливань створюють машини і механізми, що мають поверхні великих розмірів, що роблять низькочастотні механічні коливання (інфразвук механічного походження) чи турбулентні потоки газів і рідин (інфразвук аеродинамічного гідродинамічного походження).
Гіперзву́к — звукові коливання дуже високої частоти (ν = 109…1013 Гц). За природою гіперзвук, пов'язаний з тепловими коливаннями кристалічної ґратки (так званий гіперзвук теплового походження), але існує і штучно збуджуваний гіперзвук.
В повітрі при нормальних умовах гіперзвук не поширюється внаслідок сильного поглинання. Найбільш істотні взаємодії гіперзвуку з квазічастинками в середовищі - з електронами провідності, тепловими фононами, магнонамі.
Область частот гіперзвуку відповідає частотам електромагнітних коливань дециметрового, сантиметрового і міліметрового діапазонів (т.зв. надвисоким частотам - СВЧ). Використовуючи техніку генерації і прийому електромагнітних коливань НВЧ, вдалося отримати і почати дослідження частот гіперзвуку ~ 10 11 гц.
У науці гіперзвук застосовують для дослідження явищ розсіювання світла в однорідних прозорих середовищах, дифузного розсіювання рентгенівського випромінювання, що дає змогу вивчати стан речовин, зокрема у фізиці твердого тіла. Використання гіперзвуку лежить в основі створення пристроїв акустоелектроніки та акустооптики. В повітрі за нормальних умов гіперзвук не розповсюджується внаслідок сильного поглинання. Нижня границя частот гіперзвуку умовна.
№47 Ефект Доплера.
Ефект Доплера — явище зміни частоти хвилі, яку реєструє приймач, викликане переміщенням джерела або приймача
Рухоме джерело
![]() ,
,
де
ν
частота хвилі, яку фіксує нерухомий
спостерігач,
 —
частота коливань у рухомому джерелі,
s —
швидкість
розповсюдження хвилі, v —
швидкість джерела. Знак залежить від
напрямку руху джерела відносно
спостерігача.
—
частота коливань у рухомому джерелі,
s —
швидкість
розповсюдження хвилі, v —
швидкість джерела. Знак залежить від
напрямку руху джерела відносно
спостерігача.
Частота хвилі, яку фіксує спостерігач зростає, якщо джерело рухається до нього, й зменшується, якщо джерело рухається від спостерігача.
Рухомий спостерігач
Ситуація, коли рухається спостерігач, загалом не аналогічна руху джерела, бо хвилі розповсюджуються в певному середовищі. В такому випадку існують три системи відліку, пов'язані з середовищем, джерелом і спостерігачем.
При нерухомому відносно середовища джерелі спостерігач, який рухається із швидкістю V фіксуватиме хвилі на частоті
![]() .
.
У випадку, коли рухаються і джерело й спостерігач
![]() .
.
Електромагнітні хвилі
У випадку електромагнітних хвиль у порожнечі ситуація змінюється, оскільки середовища розповсюдження хвилі не існує. Відносна швидкість джерела й спостерігача залишається єдиною характеристикою руху.
![]() ,
,
де c — швидкість світла.
Використання
Ефект Доплера використовується в радіолокації для розпізнавання рухомих об'єктів, наприклад, літаків, на фоні нерухомих (гір, хмар). За червоним зміщенням світла від астрономічних об'єктів, вимірюється їхня швидкість і розраховується відстань до них. Ефект Доплера широко використовується в медицині. На базі ефекту створені комп'ютерні комплекси ультразвукової доплерографії. Зміна характеристик ультразвуку при проходженні через судини дозволяє визначати стан кровообігу, як в поверхневих так і у внутрішніх судинах.
№48 Постулати Ейнштейна в Спеціальній теорії відносності (СТВ).
Спеціальна теорія відносності (СТВ) — фізична теорія, опублікована Альбертом Ейнштейном 1905 року. Теорія стверджує, що всі фізичні закони мають однакове формулювання у всіх інерціальних ситемах відліку. Вона фактично замінює класичну механіку Ньютона, яка на той час була несумісною з рівняннями Максвелла з класичної електродинаміки
Перший постулат (принцип відносності)
Всяка фізична теорія має бути незмінною математично для будь-якого інерціального спостерігача.
Жодна з властивостей Всесвіту не може змінитись, якщо спостерігач змінить стан руху. Закони фізики залишаються однаковими для усіх інерціальних систем відліку.
Другий постулат (інваріантність швидкості світла)
Швидкість світла у вакуумі є однаковою для всіх інерціальних спостерігачів в усіх напрямах і не залежить від швидкості джерела випромінювання. Разом з першим постулатом, цей другий постулат еквівалентний тому твердженню, що світло не потребує жодного середовища (такого як ефір) для розповсюдження.
№49 Наслідки з теорії СТВ та зв'язок їх із земними умовами.
Спеціальна теорія відносності – теорія, що описує рух, закони механіки і просторово-часові відносини при довільних швидкостях руху, менші швидкості світла в вакуумі, в тому числі близьких до швидкості світла
Висновки: