

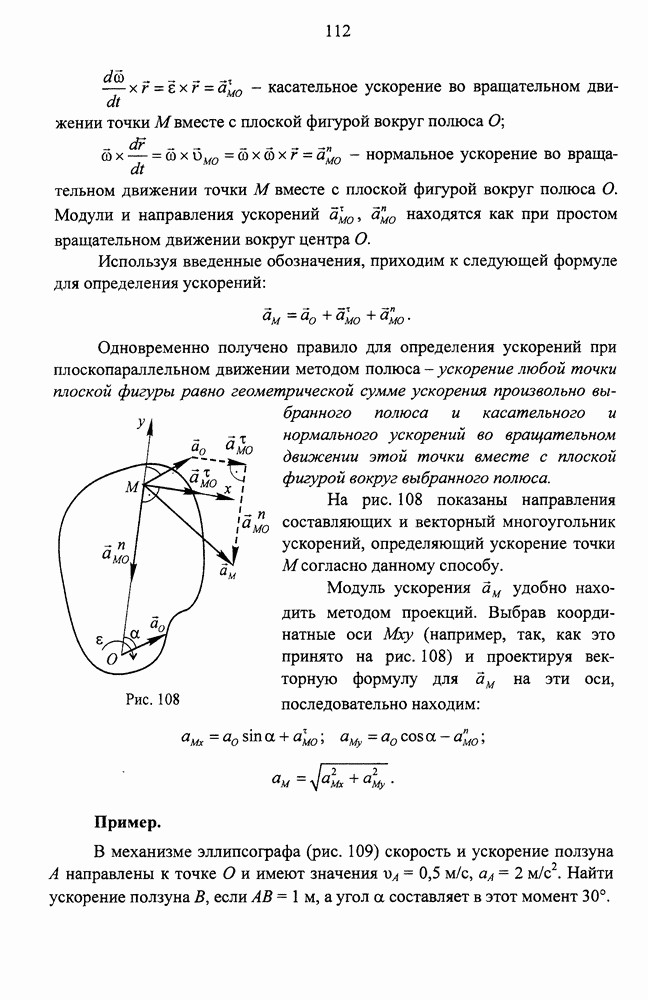
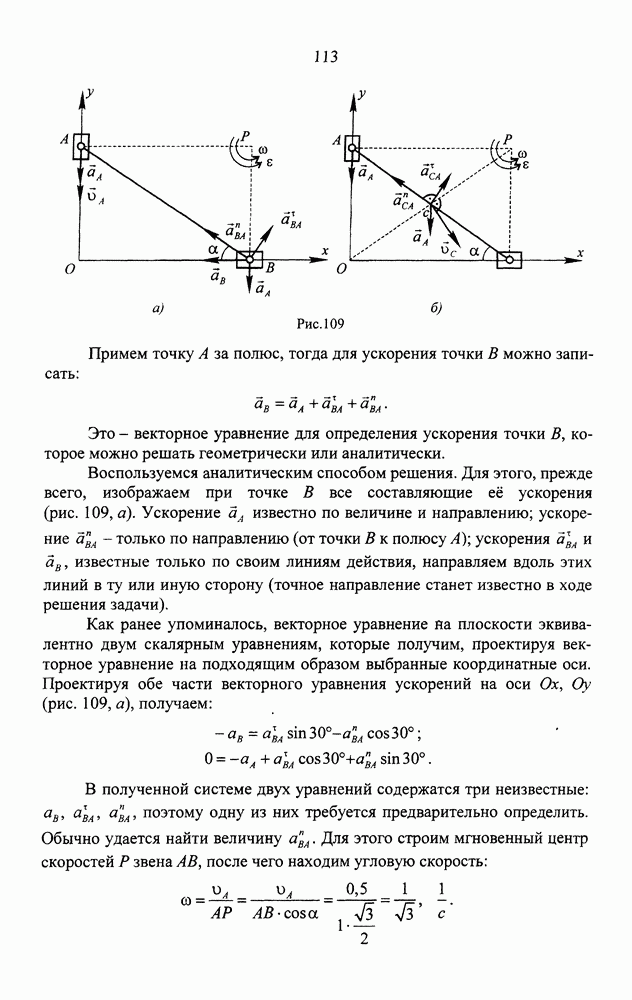
Определение ускорений точек тела.
Мгновенный центр ускорений (МЦУ). Способы нахождения.
При определении скоростей точек плоской фигуры было установлено, что в каждый момент времени существует такая точка Р фигуры (МЦС), скорость которой равна нулю. Покажем, что в каждый момент времени существует точка фигуры, ускорение которой равно нулю. Такая точка называется мгновенным центром ускорений (МЦУ). Обозначим ее через Q.
Рассмотрим
плоскую фигуру, совершающую движение
в плоскости рисунка (рис.). Примем за
полюс какую-либо точку А, модуль и
направление ускорения аА которой
известны в рассматриваемый момент
времени. Пусть в этот момент времени
известны угловая скорость и угловое
ускорение фигуры. Из формулы ![]() следует,
что точка Q будет МЦУ, если
следует,
что точка Q будет МЦУ, если ![]() ,
т. е. когда
,
т. е. когда ![]() .
Так как вектор aQA составляет с линией
AQ угол "альфа"
.
Так как вектор aQA составляет с линией
AQ угол "альфа" ![]() ,
то параллельный ему вектор аА направлен
к линии, соединяющей полюс А с точкой
Q, также под углом "альфа" (см. рис.).
,
то параллельный ему вектор аА направлен
к линии, соединяющей полюс А с точкой
Q, также под углом "альфа" (см. рис.).
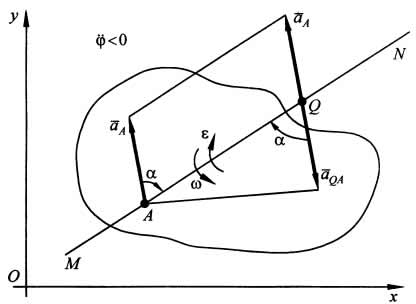
Проведем
через полюс А прямую MN, составляющую с
вектором его ускорения угол "альфа",
откладываемый от вектора аА в направлении
дуговой стрелки углового ускорения.
Тогда на луче AN найдется точка Q, для
которой
.
Поскольку, согласно ![]() ,
, ![]() ,
точка Q (МЦУ) будет отстоять от полюса А
на расстоянии
,
точка Q (МЦУ) будет отстоять от полюса А
на расстоянии  .
.
Таким образом, в каждый момент движения плоской фигуры, если угловая скорость и угловое ускорение не равны нулю одновременно, имеется единственная точка этой фигуры, ускорение которой равно нулю. В каждый последующий момент времени МЦУ плоской фигуры будет находиться в различных ее точках.
Если
МЦУ — точку Q выбрать за полюс, то
ускорение любой точки А плоской фигуры
![]() ,
так как aQ = 0. Тогда
,
так как aQ = 0. Тогда ![]() .
Ускорение аА составляет с отрезком QA,
соединяющим эту точку с МЦУ, угол "альфа",
откладываемый от QA в сторону, противоположную
направлению дуговой стрелки углового
ускорения. Ускорения точек фигуры при
плоском движении пропорциональны
расстояниям от МЦУ до этих точек.
.
Ускорение аА составляет с отрезком QA,
соединяющим эту точку с МЦУ, угол "альфа",
откладываемый от QA в сторону, противоположную
направлению дуговой стрелки углового
ускорения. Ускорения точек фигуры при
плоском движении пропорциональны
расстояниям от МЦУ до этих точек.
Таким образом, ускорение всякой точки фигуры при ее плоском движении определяется в данный момент времени так же, как и при вращательном движении фигуры вокруг МЦУ.
Рассмотрим случаи, когда положение МЦУ можно определить с помощью геометрических построений.
30. Векторные формулы для линейной скорости, касательного и нормального ускорений точки тела.
Векторное представление угловой скорости и углового ускорения тела позволяют записать линейную скорость, а также касательное и нормальное ускорения произвольной точки тела в виде следующих векторных произведений:

В этих формулах (омега и эбселент) - векторы угловой скорости и углового ускорения тела, приложенные в произвольной точке О оси вращения, г - радиус-вектор рассматриваемой точки, проведенный из точки О (рис. 96). Справедливость формул проверяется непосредственно.
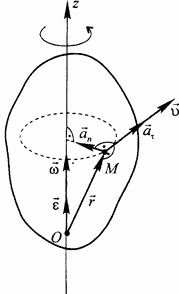
Рис. 96.
Формулы широко используются при изучении кинематики более общих случаев движения твердого тела.
Относительное, переносное и абсолютное движение точки
Сложным движением точки называется такое ее движение, при котором она движется относительно системы отсчета, перемещающейся по отношению к некоторой другой системе отсчета, принятой за неподвижную. Например, можно считать, что пассажир, идущий по вагону движущегося поезда, совершает сложное движение по отношению к полотну дороги, состоящее из движения пассажира по отношению к вагону (подвижная система отсчета) и движения пассажира вместе с вагоном по отношению к полотну дороги (неподвижная система отсчета).
Движение
точки по отношению к подвижной системе
координат называется относительным
движением точки.
Скорость и ускорение этого движения
называют относительной
скоростью иотносительным
ускорением и
обозначают ![]() и
и ![]() .
.
Движение точки, обусловленное движением подвижной системы координат, называется переносным движением точки.
Переносной
скоростью и переносным
ускорением точки называют
скорость и ускорение той, жестко связанной
с подвижной системой координат
точки, с которой совпадает в данный
момент времени движущаяся точка, и
обозначают ![]() и
и ![]() .
.
Движение
точки по отношению к неподвижной системе
координат называется абсолютнымили сложным.
Скорость и ускорение точки в этом
движении
называют абсолютной скоростью иабсолютным ускорением и
обозначают ![]() и
и ![]() .
.
В приведенном выше примере движение пассажира относительно вагона будет относительным, а скорость – относительной скоростью пассажира; движение вагона по отношению к полотну дороги будет для пассажира переносным движением, а скорость вагона, в котором находится пассажир, будет в этот момент его переносной скоростью; наконец, движение пассажира по отношению к полотну будет его абсолютным движением, а скорость – абсолютной скоростью.