

8: Гк с корректируемым чэ.
Классификация ГК: 1) По положению равновесия главной оси ЧЭ – автономные и корректируемые ГК; 2) по виду управления движением ЧЭ – ГК с непосредственным и ГК с косвенным управлением. 1 Автономным гирокомпасом называется такой компас, у которого положение равновесия главной оси чувствительного элемента в азимуте и по высоте определяется исключительно его внутренними закономерностями.
Корректируемым гирокомпасом называется такой компас, У которого положение равновесия главной оси чувствительного элемента в азимуте и по высоте можно целенаправленно изменять {как правило, добиваясь нулевых значений) с помощью датчиков моментов по командам от вычислительных устройств, вырабатывающих корректируют сигналы на основе внешней информации о скорости объекта, его курсе и географической широте. У корректируемого гирокомпаса появляется принципиально новая и весьма эффективная возможность повышения точности его показаний на маневрировании. Применение в схеме компаса датчиков моментов электромагнитного типа позволяет решить еще одну задачу, которая так и не была решена в гирокомпасах с непосредственным управлением, а именно: компенсировать с помощью соответствующих сигналов влияние вредных моментов, которые действуют по осям чувствительного элемента и являются результатом главным образом технологических недостатков его изготовления.
2 Гирокомпасом с непосредственным управлением называется такой компас, чувствительный элемент которого представляет собой астатический гироскоп, жестко связанный с физическим маятником, управляющим его движением посредством момента силы тяжести, пропорционального углу отклонения главной оси гироскопа от плоскости горизонта.
Гирокомпасом с косвенным управлением называется такой компас, чувствительный элемент которого представляет собой астатический гироскоп, управление движением которого осуществляется с помощью датчиков моментов по командам индикатора горизонта, вырабатывающего сигнал, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта. Сопоставление первого определения со вторым сразу выявляет главное различие двух классов компасов. В гирокомпасах с непосредственным управлением один и тот же элемент устройства — физический маятник — воспринимает отклонение главной оси ЧЭ относительно плоскости горизонта и непосредственно налагает момент, пропорциональный этому отклонению. В гирокомпасах с косвенным управлением указанные функции распределены между пространственно разделенными устройствами: индикатором горизонта и датчиками момента. В случае если применено электромагнитное косвенное управление (в настоящее время другие виды управления пока не используются), индикатор горизонта вырабатывает электрический сигнал, который после усиления поступает на датчики момента, являющиеся электромагнитными устройствами.
9: Вывод формулы для инерционной девиации для гк с корректируемым чэ.
Пусть судно совершает маневр увеличения скорости, получило ускорение 'VN=const, направлено к северу. Под действием соответствующей силы инерции маятник индикатора горизонта отклонится в ту же сторону, в какую он отклонился бы, если бы северный конец главной оси ЧЭ приподнялся над пл-тью истинного горизонта. В результате этого при игнорировании запаздывания Тиг (постоянная времени ИГ (хар-ет быстроту реакции маятника ИГ)), появится сигнал, отвечающий соотношению γ='VN/g (угол отклонения маятника от средней линии камеры ИГ). И на ЧЭ вокруг оси OY будет воздействовать момент LYY=-AY*γ=-AY*'VN/g. Под действием этого момента возникает прецессионное движение, угловая скорость которого Wpz='α=-LY/H=-AY*'VN/(H*g). Угол, на который переместится главная ось ЧЭ за время маневра (от 0 до t1): Δα=-AY*ΔVN/(H*g). ΔVN - разность составляющих скоростей судна вдоль меридиана. Т.к. гирокомпас является корректируемым, и предполагаем что коррекция осуществляется непрерывно, без запаздывания, на основе точной информации (V, широте места, ИК судна с компаса), то положение равновесия главной оси ЧЭ в азимуте до маневра, в процессе маневра и в момент окончания маневра будет пл-ть истинного меридиана. Т.е. инерционное перемещение Δα и есть инерционная девиация δj=Δα=-AY*ΔVN/(H*g). Полностью характеризует погрешность корректируемого ГК на момент окончания маневра.
δjmax=Δα=-AY*ΔVN*Ф1/(H*g). Ф1 – функция времени t1. Получают это ур-е решая сис-му дифф. ур-й.
У ГК с корректируемым ЧЭ отсутствует инерционная девиация 2 рода, т.к. достижение оси OX максимального значения спустя некоторое время после завершения маневра, отсутствует.
10. Электромагнитные лаги. Принцип действия индукционного преобразователя.
Л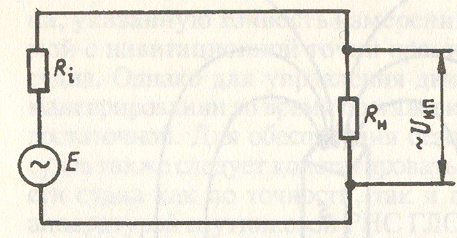 аги
- приборы для измерения скорости судна
и пройденного расстояния. В основу
измерительных схем лагов положены
различные физические принципы. В основу
действия электромагнитных (индукционных)
лагов положено явление электромагнитной
индукции Фарадея, сущность которого
заключается в том, что при пересечении
проводника магнитными силовыми линиями,
в нём наводится ЭДС Е, пропорциональная
скорости изменения магнитного потока
Ф: Е= - dФ/dt.
В современных индукционных лагах
используется датчик (индукционный
преобразователь ИП), с электромагнитом,
обмотка которого питается переменным
током с частотой 50 Гц. Электромагнит
создаёт переменное магнитное поле,
движущееся вместе с судном относительно
воды. В этом поле создаётся магнитная
индукция и наводится ЭДС между электродами
ИП. ЭДС вызывает ток. На схеме показан
ИП, включённый на нагрузку Rн,
такой нагрузкой является входное
сопротивление схемы обработки ИП. Ri
– сопротивление морской воды между
электродами. Падение напряжения на
нагрузке Rн
определяется так: Uип=Rн*Е/(Rн+Ri),
где Rн>>Ri.
Сигнал Uип
снимается с электродов и передаётся в
электрическую схему лага для преобразования
его в отсчёт скорости судна.
аги
- приборы для измерения скорости судна
и пройденного расстояния. В основу
измерительных схем лагов положены
различные физические принципы. В основу
действия электромагнитных (индукционных)
лагов положено явление электромагнитной
индукции Фарадея, сущность которого
заключается в том, что при пересечении
проводника магнитными силовыми линиями,
в нём наводится ЭДС Е, пропорциональная
скорости изменения магнитного потока
Ф: Е= - dФ/dt.
В современных индукционных лагах
используется датчик (индукционный
преобразователь ИП), с электромагнитом,
обмотка которого питается переменным
током с частотой 50 Гц. Электромагнит
создаёт переменное магнитное поле,
движущееся вместе с судном относительно
воды. В этом поле создаётся магнитная
индукция и наводится ЭДС между электродами
ИП. ЭДС вызывает ток. На схеме показан
ИП, включённый на нагрузку Rн,
такой нагрузкой является входное
сопротивление схемы обработки ИП. Ri
– сопротивление морской воды между
электродами. Падение напряжения на
нагрузке Rн
определяется так: Uип=Rн*Е/(Rн+Ri),
где Rн>>Ri.
Сигнал Uип
снимается с электродов и передаётся в
электрическую схему лага для преобразования
его в отсчёт скорости судна.
Точность показаний лага в большой степени зависит от места установки индукционного преобразователя. Это объясняется прежде всего возникновением вблизи поверхности корпуса движущегося судна турбулентного слоя воды, имеющего неодинаковую толщину и случайное поле скоростей частиц жидкости. Кроме того, распределение магнитной индукции В в объеме воды неодинаково по длине судна и носит весьма сложный, не поддающийся аналитическому исследованию характер. Эти и другие случайные факторы приводят к тому, что измеренная лагом скорость не соответствует истинной скорости судна.
Vи= Vл+ΔV=mUc+ ΔV, где m – коэффициент пропорциональности;Uc – полезный сигнал ИП;
ΔV – поправка судна, которая определяется на мерной линии (на полном ходу).