

 Министерство
образования и науки Российской Федерации
Министерство
образования и науки Российской Федерации
Национально Исследовательский Иркутский Государственный Технический Университет
Кафедра конструирования и стандартизации в машиностроение
Допускаю к защите __________________
Руководитель ___Кузнецов Н.К.___
Структурный и кинематический анализ передаточного механизма. Динамический анализ передаточного механизма методом кинетостатики
Пояснительная записка
к курсовой работе по дисциплине
«Кинематика и динамика устройств автоматизации производственных процессов»
1.003.02.01.00.ПЗ
Выполнил студент группы МРб-11-1 Помазков.А.И
Проверил Кузнецов Н.К.
Курсовая работа защищена с оценкой__________________________________
Иркутск 2013
 Министерство
образования и науки Российской Федерации
Министерство
образования и науки Российской Федерации
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ЗАДАНИЕ
НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Кинематика и динамика устройств автоматизации производственных процессов
Студенту Помазкову Антону Ивановичу
Тема проекта Структурный и кинематический анализ передаточного механизма. Динамический анализ передаточного механизма методом кинетостатики
Исходные данные:
Лист№1: Структурный и кинематический анализ исполнительного механизма
Лист№2: Динамический анализ механизма.
Проект№3, варинт№2: Vср=2.8м/сек., S=280мм, ʋmax=8град., λ=R/l=0,18.
Рекомендуемая литература:
1.Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. Пособие для вузов по специальности «Мехатроника». – М.: Станкин, 2005. – 366 с.
2.Шандров Б.В., Чудаков А.Д. Технические средства автоматизации : учеб. для вузов по специальности «Автоматизация машиностроит. процессов и пр-в (машиностроение)» направления подгот. «Автоматизир.технологии и пр-ва». – М. : Академия, 2007. – 360 с.
3.Артоболевский И.И.Теория механизмов и машин : учебник для втузов. –6-е изд., стер. – М. : Альянс, 2011. – 640 с.
4.Курсовое проектирование по теории механизмов и машин : учебное пособие / А.С.Кореняко [и др.]. – М : МедиаСтар, 2012. – 330 с.
Графическая часть на 2(двух) листах.
Дата выдачи задания “13” Сентября 2013 г.
Дата представления проекта руководителю “28” декабрь 2013г.
Руководитель курсового проектирования___________________________
МРб-11-1
Кузнецов
Н.К.
Помазков
А. И
Утверд
Н.
Контр.
Реценз
Разраб.
Проверил
3
Листов.
Лист.
Лит.











![]()
1.Введение……………………………………………………………………... 3
2. Структурный анализ механизма ………………………………………….. 4
3. Кинематический анализ механизма…………………………………....….. 5
3.1. Определение недостающих размеров механизма по заданным условиям…………………………………………………………………….….. 5
3.2. Построение планов положений механизма……………………….. 5
3.3. Построение планов скоростей………………………………….….. 6
3.4. Построение планов ускорений…………………………………….. 8
3.5. Определение скоростей и ускорений графическим методом….... 12
3.6. Сравнение скоростей и ускорений, определенных графическим и графоаналитическим методами………………………………………………. 13
4. Динамический анализ механизма………………………………………….. 15
4.1 Определение сил, действующих на механизм……………………. 15
4.2. Определение реакций в кинематических парах и уравновешивающей силы методом кинетостатики……………………….... 16
4.3. Определение уравновешивающей силы методом Жуковского..… 18
4.4. Сравнение результатов расчета уравновешивающей силы……... 19
5.Заключение…………………………………………………………………… 20
Введение
Научной основой создания новых высокоэффективных, надежных машин и технологического оборудования является механика машин – наука об общих методах их исследования и проектирования. Рационально спроектированная машина или механизм должны удовлетворять социальным требованиям –безопасности обслуживания и создания наилучших условий для обслуживающего персонала, а также эксплуатационным, технологическим и производственным требованиям. Эти требования представляют собой сложный комплекс задач, которые должны быть решены в процессе проектирования новой машины или механизма.
Курсовая работа посвящена структурному, кинематическому и динамическому анализу передаточного механизма шиберного загрузочного устройства. Необходимо определить скорости и ускорения шибера графическим и графоаналитическим методами, а также реакции в кинематических парах механизма и уравновешивающую силу, приложенную к начальному звену.
В процессе курсового проектирования требуется решить следующие задачи:
1) Определить недостающие размеры исполнительного механизма и провести его структурный анализ;
2) Выполнить кинематический анализ исполнительного механизма графическим и графоаналитическим методами;
3) Выполнить динамический анализ исполнительного механизма методом кинетостатики.
1. Структурный анализ механизма
1. Вид механизма: плоский рычажный.
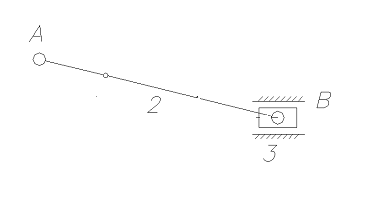
2. Назначение механизма: механизм служит для преобразования вращательного движения кривошипа 1 в поступательное движение шибера 3 (см. схему механизма).
3. Названия звеньев: 1 – кривошип; 2 – шатун; 3 – ползун (шибер);
0 – стойка, неподвижное звено.
4. Класс и вид кинематических пар (КП):
О (1,0) – низшая, вращательная кинематическая пара 5 класса;
А (1,2) – низшая, вращательная кинематическая пара 5 класса;
B (2,3) – низшая, вращательная кинематическая пара 5 класса;
В1 (3,0) – низшая, поступательная кинематическая пара 5 класса.
5. Определяем степень подвижности механизма по формуле П.Л.Чебышева для плоских механизмов:
W=3∙n-2∙p5-p4=3∙3-2∙4-0=1
где n = 3 – количество подвижных звеньев; p5– число КП 5 класса; p4– число КП 4 класс
Отсюда следует, что для данного механизма требуется одно начальное звено.
6. Раскладываем механизм на структурные группы Ассура:
Группа
Ассура
2
класс 2
вида 2
порядка
Начальный
механизм


Данный механизм является механизмом 2 класса, т.к. наивысший класс группы Ассура – второй.
2. Кинематический анализ механизма
2.1. Определение недостающих размеров механизма по заданным условиям
Для построения плана положения механизма необходимо знать длины всех его звеньев.
Длина кривошипа RОА определяем по заданной величине хода ползуна

где S – максимальный ход ползуна.
Длина шатуна LАВ находим по заданной величине отношения

тогда

Расстояние, на котором располагаются центр масс шатуна

2.2. Построение планов положений механизма
Строим 8 совмещенных планов положений механизма. Сначала определяем масштабный коэффициент длин. Приняв на чертеже отрезок OA=50 мм, получим

Находим длинны отрезков:


Построение плана положений механизма проводим методом засечек:
 1)
За начальное положение механизма
выбираем одно из крайних, при котором
кривошип и ползун располагаются на
одной прямой. Для этого на оси хх радиусом
ОВ, длина которого равна сумме длин
кривошипа и шатуна, делаем на засечку
и отмечаем крайнее положение шатуна –
т. В0 и начальное положение кривошипа
– т. А0
1)
За начальное положение механизма
выбираем одно из крайних, при котором
кривошип и ползун располагаются на
одной прямой. Для этого на оси хх радиусом
ОВ, длина которого равна сумме длин
кривошипа и шатуна, делаем на засечку
и отмечаем крайнее положение шатуна –
т. В0 и начальное положение кривошипа
– т. А0
2) Из точки О радиусом OA=50мм проводим окружность – траекторию движения точки А, на которой на одинаковом расстоянии друг от друга отмечаем 8 положений точки А (А0, А1, …, А7);
3) В каждое положение кривошипа устанавливаем ножку циркуля, раствор которого равен отрезку AB и делаем засечки на горизонтальной оси хх, получая соответствующие положения шибера B1, B2, …, B7;
4) Соединив точки А0, А1, …, А7соответственно с точками B0, B1, …, B7, получаем 8 совмещенных планов механизма.