

- •1. Краткий исторический очерк развития судового электрооборудования. Комплексы су стс. Классы автоматизации судов а1, а2, а3
- •2. Международные морские нормативные документы, определяющие уровень подготовки судовых механиков в части эксплуатации сэо
- •3. Международные и национальные морские классификационные общества.
- •4. Условия работы судового электрооборудования. Требования Правил
- •5. Требования морских нормативных документов к конструкции судового
- •6.1. Классификация судового оборудования в зависимости от климатических условий района плавания
- •6.2. Классификация электрооборудования в зависимости от места расположе-
- •6.3. Классификация электрооборудования в зависимости от степени защищен-
- •6.4. Классификация судового оборудования в зависимости от особых условий работы эксплуатации
- •Классификация судового электрооборудования в зависимости от способа
- •6.6. Классификация судового электрооборудования в зависимости от режимов работы
- •7. Условия выбора электродвигателей для судовых электроприводов
- •8. Системы буквенно-цифровых обозначений электрооборудования Промышленность выпускает различные виды электрооборудования сериями.
- •9. Международная система единиц физических величин
- •10. Единицы, часто применяемые в судовой электротехнике
- •11. Рекомендации по изучению дисциплины
- •Раздел 1. Судовые электроэнергетические системы
- •1. Общая характеристика судовых электроэнергетических систем
- •1. Классификация судового электрооборудования
- •2. Расположение основных элементов электрооборудования на судне
- •3. Основные термины и определения в сээс
- •4. Классификация сээс
- •5. Структурные схемы судовых электроэнергетических систем ( сээс )
- •6. Структурные схемы судовых электростанций ( сэс )
- •7. Параметры сээс
- •8. Качество электроэнергии, производимой сээс
- •9. Приемники электроэнергии сээс
- •Контрольные вопросы
- •2. Режимы работы сээс. Генераторные агрегаты
- •1. Режимы работы судна
- •2. Режимы работы приемников электроэнергии
- •3. Методы определения мощности сэс
- •3.1. Основные сведения
- •3.2. Табличный метод определения мощности сэс
- •3.3. Выбор количества и мощности генераторов в режимах работы судна
- •3.4. Экономическая эффективность сэс
- •3.5. Методы повышения экономичности сэс
- •4. Генераторные агрегаты
- •4.1. Основные сведения
- •4.2. Приводные двигатели генераторных агрегатов
- •5. Генераторы переменного тока
- •5.1. Эксплуатационные характеристики
- •5.2. Системы возбуждения синхронных генераторов
- •5.3. Основные типы судовых сг
- •5.4. Техническое обслуживание и ремонт судовых генераторов
- •1.3. Системы регулирования частоты вращения генератор-
- •1. Системы регулирования частоты вращения га
- •1.1. Необходимость использования арч
- •1.2. Основные характеристики арч
- •1.3. Регуляторные характеристики арч
- •1.4. Скоростные характеристики арч
- •1.5. Классификация арч
- •1.6. Применение разных типов арч
- •1.7. Изменение положения регуляторных характеристик арч
- •1.8. Требования Правил Регистра к пд га
- •1.9. Требования Правил Регистра к распределение активной и реактивной нагрузки при параллельной работе генераторов
- •2. Системы возбуждения и автоматического регулирования напряжения синхронных генераторов
- •2.1. Причины, влияющие на напряжение судовых синхронных генераторов
- •2.2. Компенсация действия причин, вызывающих изменение напряжения синхронных генераторов
- •2.3. Требования международных и национального классификационных обществ к судовым арн
- •2.4. Требования Правил Регистра к сохранению работоспособности судовых приемников электроэнергии при колебаниях напряжения и частоты тока сети
- •3. Принципы построения систем автоматического регулирования напряжения
- •Основные сведения
- •3.3. Системы арн , действующие по отклонению
- •3.4. Комбинированные сварн
- •Реактивные компенсаторы
- •Основные сведения
- •5. Контуры коррекции напряжения синхронных генераторов
- •5.1. Основные сведения
- •5.2. Контуры частотной коррекции
- •5.3. Контуры температурной компенсации
- •6. Система возбуждения и автоматического регулирования напряжения синхронных генераторов типа мсс
- •7. Бесщеточные синхронные генераторы
- •8. Характерные неисправности сварн
- •9. Параллельная работа синхронных генераторов
- •9.1. Особенности параллельной работы
- •9.2. Понятия «перевод нагрузки» и «распределение нагрузки»
- •10. Синхронизация синхронных генераторов
- •10.1. Основные сведения
- •10.2. Условия синхронизации синхронных генераторов
- •11. Методы синхронизации синхронных генераторов
- •11.1. Метод точной синхронизации
- •11.2. Синхроноскопы
- •11.3. Метод грубой синхронизации
- •11.4. Метод самосинхронизации
- •Синхронизаторы
- •Основные сведения
- •12.2. Блок синхронизации генераторов типа бсг
- •Распределение активной нагрузки
- •13.1. Основные сведения
- •13.2. Системы распределения активной нагрузки с базовым генератором
- •13.3. Системы распределения активной накгрузки с повышенной точностью регулирования скорости
- •Распределение реактивной нагрузки
- •14.1. Основные сведения
- •14.2. Автоматическое распределение реактивной нагрузки сг
- •15. Параллельная работа генераторов постоянного тока
- •15.1. Условия включения генераторов постоянного тока на параллельную работу
- •15.2. Последствия нарушения условий включения гпт на параллельную работу
- •15.3. Перевод и распределение нагрузки
- •15.4. Уравнительная шина
- •1.4. Судовые распределительные устройства и коммутаци-
- •1. Судовые распределительные устройства
- •1.1. Классификация судовых распределительных устройств
- •1.3. Требования Правил Регистра к схемам гэрщ
- •1.4. Схема главного распределительного щита
- •1.5. Схема генераторной секции гэрщ
- •Требования Правил Регистра к конструкции распределительных
- •2. Коммутационные аппараты распределительных устройств
- •2.1. Основные сведения
- •2.2. Рубильники, выключатели и переключатели
- •2.3. Универсальные переключатели
- •2.4. Универсальные переключатели без разрыва тока
- •2.5. Промышленные типы пакетных выключателей и переключателей
- •3. Коммутационно-защитная аппаратура распределительных устройств
- •3.1. Автоматические выключатели
- •3.2. Классификация ав
- •По типам расцепителей:
- •3.3. Устройство автоматического выключателя
- •Исходное состояние выключателя
- •Включение выключателя
- •4. Расцепители автоматических выключателей
- •4.1. Основные сведения
- •4.2. Электромагнитный расцепитель ав
- •4.3. Комбинированный расцепитель ав
- •4.4. Минимальный расцепитель ав ( по напряжению )
- •4.5. Независимый расцепитель
- •5. Характеристики автоматических выключателей
- •6. Промышленные типы автоматических выключателей
- •6.1. Основные сведения
- •6.2. Автоматические выключатели генераторов
- •Автоматические выключатели приемников электроэнергии
- •6.5. Выключатели приемников электроэнергии серии а3300
- •6.6. Выключатели приемников электроэнергии серии ак50
- •7. Предохранители
- •Устройство и принцип действия предохранителей
- •8. Реле защиты
- •8.1. Основные сведения
- •8.2. Реле тока
- •8.3. Реле обратного тока
- •Примечание
- •Обмотка напряжения реле рассчитана на 48 в, поэтому при использовании реле с напряжением 110 и 220 в последовательно с катушкой включается добавочный резистор
- •8.4. Реле обратной мощности типа им-149
- •8.5. Реле перегрузки типа им-145
- •8.6. Бесконтактное реле обратного активного тока типа рот-51/401
- •9. Требования Правил Регистра к уставкам реле защиты от обратного тока или обратной мощности
- •10. Техническая эксплуатация распределительных устройств и аппаратов
- •10.1. Техническое обслуживание распределительных устройств
- •10.2. Техническое обслуживание автоматических выключателей
- •10.3. Техническое обслуживание выключателей и предохранителей
- •1.5. Аварийное электроснабжение
- •1. Аварийные электростанции
- •1.1. Состав приемников электроэнергии аварийных электростанций
- •1. 2. Размещение аварийной сэс
- •1.3. Особенности электроснабжения грузовых и пассажирских судов
- •1.4. Принципиальная схема аэрщ
- •1.5. Источники питания аварийных сэс
- •1. 6. Схема программного управления пуском адг
- •2. Обеспечение непрерывности электроснабжения
- •2.1. Основные сведения
- •2.2. Обеспечение непрерывности электроснабжения при помощи аварийной сэс
- •2.3. Обеспечение непрерывности электроснабжения переключением питания
- •3. Судовые аккумуляторы и гальванические элементы
- •3.1. Основные сведения
- •3.2. Кислотные аккумуляторы
- •3.3. Щелочные аккумуляторы
- •3.4. Выбор и размещение аккумуляторов
- •3.5. Зарядно-питающие устройства аккумуляторов
- •3.6. Правила техники безопасности при эксплуатации аккумуляторов
- •1.6. Распределение электроэнергии по судну
- •1. Судовые электрические сети
- •1.1. Классификация электрических сетей
- •1.2. Сравнение свойств судовых электрических сетей
- •Судовые кабели и провода
- •2.1. Основные сведения
- •2.2. Расчет кабелей по току нагрузки, их выбор и проверка
- •2.4. Выбор площади поперечного сечения жил кабелей
- •2.5. Проверка кабелей на потерю напряжения
- •2.6. Требования Правил Регистра к значениям падения напряжения в линиях электропередач
- •2.7. Методы прокладки кабелей
- •Защита приемников электроэнергии и электрических сетей
- •3.1. Основные сведения
- •3.2. Защитные устройства электрических сетей и приемников электроэнергии
- •3.3. Избирательность ( селективность ) защиты электрических сетей
- •Сопротивление изоляции кабелей и проводов
- •Основные понятия
- •5. Измерение сопротивления изоляции
- •5.1. Измерение сопротивления изоляции сэс, не находящегося под напряже-
- •5.2. Индукторный мегаомметр типа м1101
- •5.3. Безындукторный мегаомметр типа бм-1
- •5.4. Правила измерения сопротивления изоляции
- •5.5. Измерение сопротивления изоляции кабелей и проводов
- •5.6. Типы переносных мегаомметров
- •5.7. Измерение сопротивления изоляции сэо, находящегося под напряжением
- •5.8. Автоматизированные методы контроля сопротивления изоляции
- •5.9. Автоматическая система диагностирования изоляции
- •Сушка электрических машин
- •6.1. Основные сведения
- •6.2. Способы сушки электрических машин
- •6.3. Сушка синхронных генераторов методом короткого замыкания
- •6.4. Сушка методом индукционного нагрева
- •6.5. Сушка обмоток электрических машин постоянным или однофазным пере-менным током
- •6.6. Сушка электрических машин внешним нагреванием
- •6.7. Сушка электрических машин на основе электрокинетического эффекта
- •7. Защита от помех радиоприему
- •7.1. Источники помех
- •7.2. Методы защиты от помех радиоприему
- •8. Техническая эксплуатация судовых электрических сетей
- •8.1. Особенности технической эксплуатации судовых электрических сетей
- •8.2. Электробезопасность при обслуживании электрических сетей
- •8.3. Пожарная безопасность при обслуживании электрических сетей
- •1.7. Автоматизация управления судовыми электроэнерге-
- •1. Системы управления сээс
- •1.1. Классификация систем управления сээс
- •1.2. Структурная схема системы управления сээс
- •1.3. Система управления сээс типа "Ижора-м"
- •1.4. Структура микропроцессорных систем управления сээс
- •1.5. Микропроцессорная су сээс типа аsа-s
- •2. Надежность, диагностирование и прогнозирование технического состояния су сээс
- •2.1. Основные сведения о надежности
- •2.2. Факторы, влияющие на надежность аппаратуры су сээс
- •2.3. Связь надежности и условий работы сээс. Способы повышения надеж-
- •2.4. Диагностирование и прогнозирование технического состояния су сээс
- •2.5. Характерные неисправности су сээс
- •2.6. Техническая эксплуатация автоматизированных устройств
- •Раздел 2. Судовые электрические приводы
- •2.1. Основы теории электропривода
- •1. Основные понятия
- •1.1. Понятие „электрический привод”
- •1. 2. Классификация электроприводов
- •1.3. Силы и моменты, действующие в системе электропривода
- •1.4. Виды статических моментов
- •1. 5. Приведение статических моментов к валу электродвигателя
- •1. 6. Режимы работы электроприводов
- •1. 7. Механические характеристики электродвигателей
- •1.8. Механические характеристики исполнительных механизмов
- •1.9. Изменение скорости электродвигателей
- •1. 10. Саморегулирование электродвигателей
- •1.11. Устойчивость работы электропривода
- •1.12. Влияние на устойчивость работы электродвигателя его эксплуатацион-
- •Влияние на устойчивость электропривода напряжения сети.
- •1.14. Способы повышения динамической устойчивости саэп
- •1.3. Реостатный пуск
- •2. Способы регулирования частоты вращения электродвигателей постоян-
- •2.1. Основные сведения
- •2.2. Регулирование скорости в системе «генератор – двигатель» ( г – д )
- •2.3. Регулирование скорости в системе двойного рода тока ( увп – д )
- •3. Электрическое торможение двигателей постоянного тока
- •3.1. Основные сведения
- •3.2. Динамическое торможение двигателя параллельного возбуждения
- •3.3. Рекуперативное торможение двигателя постоянного тока
- •Реверс двигателей постоянного тока
- •4.1. Основные сведения
- •4.2. Реверс изменением направления тока в обмотке якоря
- •Реверс изменением направления тока в параллельной обмотке возбужде-
- •1.3. Прямой пуск короткозамкнутых асинхронных двигателей специального исполнения
- •1.4. Реостатный пуск двигателей с фазным ротором
- •1.5. Пуск при пониженном напряжении на обмотке статора
- •2. Способы регулирования частоты вращения 3-фазных асинхронных двига-
- •2.1. Основные сведения
- •Регулирование скорости изменением числа пар полюсов обмотки статора.
- •2.3. Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора со «звезды» на «двойную звезду»
- •2.4. Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора с «треугольника» на «двойную звезду»
- •3. Электрическое торможение асинхронных двигателей
- •3.1. Основные сведения
- •3.2. Рекуперативное торможение асинхронных двигателей
- •Рекуперативное торможение при переходе с большей скорости на мень-
- •4. Реверс 3-фазных асинхронных электродвигателей
- •3. Коммутационно-защитная аппаратура судовых электропроиводов
- •1. Электрические аппараты
- •1.1. Основные сведения
- •1.2. Классификация электрических аппаратов
- •2. Командоаппараты
- •2.1. Основные сведения
- •2.2. Кнопочные посты управления
- •2.3. Командоконтроллеры
- •2.4. Конечные и путевые выключатели
- •Рычажные выключатели
- •Контроллеры
- •3.1. Основные сведения
- •3.2. Силовые контроллеры
- •Контакторы
- •Основные сведения
- •4.2. Классификация контакторов
- •4.3. Основные системы контакторов
- •4.4. Устройство и принцип действия контактора
- •4.5. Назначение контактов Контакты предназначены для непосредственной коммутации электрических цепей.
- •4.6. Изображение контактов При изображении контактов применяют следующие правила:
- •4.7. Электромагнитная система контакторов
- •4.8. Катушки контакторов
- •4.9. Короткозамкнутые витки
- •4.10. Дугогасительная система контакторов
- •4.11. Гашение дуги в дугогасительных камерах
- •4.12. Гашение дуги в контакторах постоянного тока
- •4.13. Гашение дуги в контакторах переменного тока
- •5. Реле тока и напряжения
- •5.1. Основные сведения
- •5.2. Реле напряжения
- •Устройство и принцип действия реле напряжения
- •6. Промежуточные реле
- •Основные сведения
- •6.2. Промежуточное реле типа мку-48
- •Реле времени
- •7.1. Основные сведения
- •7.2. Электродвигательные реле времени
- •Поэтому на судах электродвигательные реле времени не применяются.
- •7.3. Электромеханические реле времени
- •7.4. Электромагнитные реле времени
- •7.5. Электронные реле времени
- •7.6. Пневматические реле времени
- •7.7. Графическое изображение контактов реле времени
- •8. Реле с герметизированными магнитоуправляемыми контактами
- •9. Электротепловые реле
- •9.1. Основные сведения
- •9.2. Токовые тепловые реле
- •9.3. Температурные тепловые реле
- •9.4. Промышленные типы токовых электротепловых реле
- •Регулирование уставки ( тока срабатывания реле )
- •10. Реле контроля неэлектрических величин
- •10.1. Основные сведения
- •10.2. Реле давления
- •10.3. Реле скорости
- •10.4. Реле уровня
- •Тормозные устройства
- •11.1. Основные сведения
- •11.2. Ленточные тормозные устройства
- •11.3. Дисковые тормозные устройства Дисковые тормозные устройства широко применяются в электроприводах судовых
- •11.4. Колодочные тормозные устройства
- •11.5. Колодочный тормоз с электромагнитным приводом
- •11.6. Колодочный тормоз с электрогидравлическим приводом
- •4. Системы управления саэп. Система ескд. Типовые узлы, схемы и устройства управления электроприводами
- •1. Системы управления саэп
- •1.1. Основные сведения
- •1. 2. Элементная основа систем управления
- •1.3. Микропроцессорные системы управления. Основные сведения
- •1.4. Структурная схема микропроцессорной системы управления электропри-
- •1.5. Архитектура микропроцессора
- •2. Единая система конструкторсой документации. Классификация, построение и правила чтения электрических схем
- •2.1. Основные сведения
- •2.2. Классификационные группы ескд
- •2.3. Система обозначений стандартов
- •2.4. Классификация и обозначение схем
- •2.5. Краткая характеристика типов схем
- •2.6. Условные графические изображения элементов электрических схем
- •2.7. Условные буквенно-цифровые обозначения элементов электрических схем
- •5.8. Прочтение буквенно-цифровых обозначений элементов электрических схем
- •5.9. Условные функциональные обозначения на аппаратуре всех видов
- •3. Типовые узлы и схемы автоматического управления электродвигателей
- •3.1. Стандартные защиты судовых электроприводов
- •Причины и последствия снижения напряжения
- •Схемы защит по снижению напряжения
- •Нулевая защита Вариант №1
- •Управление 3-фазным асинхронным двигателем с одного и двух постов
- •Остановка
- •3.3. Схема автоматического пуска асинхронного двигателя переключением обмотки статора со звезды на треугольник
- •3.4. Схема автоматического пуска асинхронного электродвигателя через пусковые резисторы в цепи обмотки статора
- •Подготовка схемы к работе
- •3.5. Схема автоматического пуска асинхронного двигателя с фазным
- •4. Типовые комплектные устройства судовых электроприводов
- •4.1. Основные сведения
- •4.2. Реостаты
- •4.3. Магнитные пускатели
- •Подготовка схемы к работе
- •Работа схемы Пуск
- •Остановка
- •4.4. Станции управления и магнитные контроллеры
- •2.3. Электроприводы рулевых устройств
- •1. Рулевые электроприводы
- •1.1. Общая характеристика рулевых электроприводов
- •1.2. Принцип действия руля
- •1.3. Состав рулевого электропривода
- •1.4. Классификация рулевых электроприводов
- •2. Электромеханические передачи
- •3. Электрогидравлические передачи
- •3.1. Основные сведения
- •3.2. Насосы гидравлических рулевых машин
- •3.3. Насосы постоянной подачи
- •3.4. Насосы переменной подачи
- •Радиально-поршневые насосы
- •Рулевые машины с насосом постоянной подачи
- •3.6. Рулевые машины с насосами переменной подачи
- •3.7. Плунжерные рулевые машины
- •3.8. Лопастные рулевые машины
- •3.9. Поршневые машины с качающимися цилиндрами
- •4. Механизмы управления насосами постоянной подачи
- •4.1. Дроссельный механизм с управляющими электромагнитами
- •4.2. Дроссельный механизм с электромашинным приводом
- •5. Механизмы управления насосами переменной подачи
- •5.1. Основные сведения
- •5.2. Механизм управления нпп типа им-1
- •5.3. Механизм управления нпп с рычажным дифференциалом
- •5.4. Механизм управления нпп с кулачковым дифференциалом
- •5.5. Гидравлические и комбинированные механизмы управления нпп
- •6. Исполнительные устройства систем управления гидравлических рулевых машин
- •6.1. Основные сведения
- •6.2. Серводвигатели
- •6.3. Электромагнитные муфты
- •6.4. Нулевые установители
- •7. Приводные электродвигатели насосов постоянной и переменной подачи
- •8. Нагрузочные диаграммы рулеых электроприводов
- •9. Структурные схемы управления судов с использованием электромеха
- •9.1. Основные сведения
- •9.2. Структурная схема простого управления рулевым электроприводом
- •9.3. Структурная схема следящего управления рулевым электроприводом
- •10. Виды управления рулевыми электроприводами
- •11. Требования Конвенции solas-74 и Правил Регистра к рэп
- •11.1. Основные определения
- •11.3. Основные требования к авторулевым
- •12. Системы управления рулевыми электроприводами
- •12.1. Основные сведения
- •12.2. Система простого управления секторным рулевым электроприводом
- •Ется на транспортных судах типов «Волго-балт» и «Волго-Дон» ( рис. 10.23 ).
- •Основные элементы схемы
- •Работа схемы
- •12.3. Система следящего управления гидравлическим рулевым приводом Бесконтактная схема управления гидравлическим рулевым приводом применяется на пассажирских судах типа «Александр Пушкин».
- •12.4. Система автоматического управления рулевым электроприводом
- •13.Электроприводы специального назначения
- •13.1. Основные сведения
- •Подруливающие устройства
- •Успокоители качки
- •14. Техническая эксплуатация рулевых электроприводов
- •14.1. Подготовка рулевого и подруливающего устройств и авторулевого перед выходом в рейс
- •14.2. Техническое использование рулевого устройства
- •14.3. Техническое использование авторулевого
- •14.4. Техническое обслуживание рулевого привода
- •2.4. Электроприводы судовых нагнетателей
- •1. Cудовые нагнетатели
- •1.1. Общая характеристика судовых нагнетателей
- •1.2. Классификация нагнетателей
- •1.3. Основные параметры
- •2. Центробежные нагнетатели
- •2.1. Общая характеристика
- •2.2. Рабочие характеристики центробежных нагнетателей
- •2.3. Характеристика сопротивления нагнетательной системы
- •2.4. Совместная работа нагнетателей
- •Влияние скорости на мощность электродвигателя центробежного нагне-
- •3. Устройство, принцип действия, эксплуатация судовых нагнетателей
- •3.1. Центробежные насосы
- •3.2. Поршневые насосы
- •3.3. Осевые ( пропеллерные ) насосы
- •3.4. Ротационные насосы
- •3.5. Выбор электродвигателей для насосов
- •3.6. Судовые вентиляторы
- •3.7.Компрессоры
- •3.8. Практические формулы для расчет мощности электродвигателей насосов, вентиляторов и компрессоров
- •Решение
- •Решение
- •3.9. Требования Правил Регистра к электроприводам насосов и ветиляторов
- •4. Системы управления электроприводами нагнетателей
- •4.1. Основные сведения
- •4.2. Схема автоматического управления электроприводом центробежного насоса
- •4.3. Принципиальная схема управления электроприводом осушительного насоса
- •4.4. Схема автоматического управления и резервирования электроприводами насосов машинного отделения
- •4.5. Схема автоматического управления компрессором пускового воздуха Основные сведения
- •Подготовка схемы к работе
- •Ходовой режим
- •Режим манёвров
- •Бесконтактные схемы управления электроприводами нагнетателей
- •Логический элемент «да»
- •Логический элемент «не»
- •Логический элемент «и»
- •Логический элемент «или»
- •Логический элемент «и-не»
- •Исходное состояние схемы
- •Работа схемы
- •Остановка двигателя
- •5. Техническая эксплуатация судовых нагнетателей
- •Электроприводы якорно-швартовных устройстве
- •1. Назначение якорно-швартовных устройств
- •2. Классификация якорно-швартовных устройств
- •3. Рабочий механизм якорно-швартовных устройств
- •4. Устройство яшу
- •4.1. Брашпили
- •4.2. Якорно-швартовные лебедки
- •4.3. Шпили
- •4.4. Швартовные лебедки
- •5. Количественные характеристики яшу
- •6. Виды управления яшу
- •7. Особенности работы электроприводов яшу
- •8. Нагрузочные диаграммы электропривода якорно-швартовных устройств Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени.
- •8.1. Режим подъёма одного якоря.
- •8.2. Режим подъёма 2-х якорей
- •8.3. Швартовный режим
- •9. Характеристики якорного и швартовного снабжения судов
- •9.2. Характеристика швартовного снабжения судов
- •10. Требования Правил Регистра к якорным и швартовным электроприводам
- •11. Системы управления яшу
- •11.1. Рекомендации по выбору систем электроприводов якорно-швартовных устройств
- •11.2. Система управления яшу с 3-скоростным асинхронным двигателем
- •Подготовка схемы к работе
- •Работа схемы
- •11.3. Система управления электроприводом брашпиля по системе генератор-двигатель
- •Описание принципиальной схемы
- •11.4. Система управления яшу на переменном токе Основные сведения
- •2 Скорость
- •3 Скорость
- •11.5. Система управления электроприводом шпиля фирмы «Сименс» Основные сведения
- •Основные элементы схемы.
- •Подготовка схемы к работе
- •Работа схемы
- •1 Скорость
- •2 Скорость
- •3 Скорость
- •11.6. Система дистанционной отдачи якоря
- •На современных транспортных судах применяют 2 вида управления отдачей якоря:
- •Подготовка схемы к работе
- •Работа схемы Предварительный этап
- •12. Техническая эксплуатация электроприводов яшу
- •2.6. Электроприводы судовых грузоподъемных механизмов
- •1. Основные сведения
- •2. Устройство гпм
- •2.1. Грузовая стрела
- •2.2. Грузовая лебедка
- •2.3. Грузовые краны
- •3. Нагрузочные диаграммы электроприводов гпм
- •3.1. Нагрузочная диаграмма при работе одной лебедки
- •3.2. Нагрузочная диаграмма при работе двух лебедок
- •3.3. Нагрузочные диаграммы механизмов грузового крана
- •4. Условия работы гпм
- •5. Режимы работы гпм
- •6. Требования Правил Регистра к электроприводам грузоподъемных механизмов
- •7. Технико-экономические характеристики электроприводов гпм переменного тока
- •8. Пуско-регулирующая аппаратура электроприводов гпм
- •9. Защитные устройства электроприводов гпм
- •9.1. Основные сведения
- •9.2. Защитные устройства от токов короткого замыкания
- •9.3. Защитные устройства от токов перегрузки
- •10.4. Защита по снижению напряжения
- •10. Тормозные устройства гпм
- •10.1. Основные сведения
- •10.2. Ленточные тормозные устройства
- •10.3. Дисковые тормозные устройства Дисковые тормозные устройства широко применяются в электроприводах судовых
- •10.4. Колодочные тормозные устройства
- •11. Системы управления электрическими палубными кранами
- •11.1. Система управления электроприводом механизма подъема грузового крана фирмы «Сименс»
- •Подготовка схемы к работе
- •Работа схемы Алгоритм работы схемы Алгоритм работы схемы крайне прост:
- •1 Скорость
- •2 Скорость
- •3 Скорость
- •Рекуперативное торможение электродвигателя
- •Защита от обрыва фазы
- •Блокировка по положению воздушной заслонки
- •Блокировка по длине троса на грузовом барабане
- •11.2. Система управления электроприводом поворота грузового крана фирмы «Сименс»
- •Подготовка схемы к работе
- •Работа схемы
- •Остановка
- •Защита от токов короткого замыкания
- •Защита от токов перегрузки
- •Защита от токов перегрузки при динамическом торможении
- •Защита по снижению напряжения
- •Защита от обрыва фазы
- •11.3. Система управления электроприводом изменения вылета стрелы грузового крана фирмы «Сименс»
- •Алгоритм работы схемы Алгоритм работы схемы крайне прост:
- •2 Скорость
- •Защита от обрыва фазы
- •Блокировка по положению гака относительно нока стрелы
- •12. Системы управления электрогидравлическими палубными кранами
- •12.1. Основные сведения
- •12.2. Характеристики и устройство кранов
- •12.3. Управление приводами гидравлических кранов. Станции управления
- •12.4. Гидросхемы электрогидравлических кранов
- •12.5. Гидросхема грейферного судового крана Либхер
- •12.6. Основные машины электрогидравлических кранов
- •12.7. Механизм поворота
- •12.8. Подвеска каната
- •12.9. Поворотная опора крана
- •12.10. Привод насосов крана
- •12.11. Дисковый гидравлический тормоз
- •12.12. Лебедка крана Либхер
- •12.13. Редуктор привода насосов крана Либхер
- •12.14. Системы управления электрогидравлическими кранами
- •12.15. Механическая система управления краном
- •12.16. Электрическая система управления кранов кэг
- •13. Техническая эксплуатация электрогидравлических кранов
- •13.1. Обеспечение надежности и безотказности электрогидравлических кранов
- •13.2. Мероприятия по поддержанию качества масла гидравлических кранов
- •13.3. Техническое обслуживание электрогидравлических кранов
- •15. Бесконтактные системы управления электроприводами гпм
- •15.1. Основные сведения
- •15.2. Тиристорные коммутаторы
- •15.3. Блок контроля исправности тиристоров
- •15.4. Особенности построения схем на тиристорных коммутаторах
- •15.5. Бесконтактная система управления электроприводом грузовой лебедки
- •16. Техническое обслуживание электроприводов гпм
- •Раздел 3. Гребные электрические установки
- •1. Классификация гэу
- •2. Гэу постоянного тока
- •2.1. Основные сведения
- •2.2. Схемы включения генераторов и гребных двигателей гэу постоянного тока
- •2.3. Принципиальная схема дизельной электрической установки (дгэу) на постоянном токе
- •3. Гэу переменного тока
- •3.1. Типы гребных электродвигателей
- •3.3. Способы регулирования скорости гребных электродвигателей
- •3.4. Реверс гэд
- •3.5. Структурные схемы гэу переменного тока
- •3.6. Принципиальная схема одновальной тэгу на переменном токе
- •4. Гэу двойного рода тока
- •4.1. Основные сведения
- •4.2. Структурная схема гэу двойного рода тока с неуправляемым выпрямителем
- •4.3. Гэу двойного рода тока с врш
- •4.4. Сравнение эксплуатационных свойств гэу двойного рода тока и гэу постоянного и переменного тока
- •Техническая эксплуатация гэу
- •5.1. Основные сведения
- •5.3. Подготовка гэу к работе
- •5.4. Опробование гэу в работе
- •5.5. Наблюдение за работой гэу при несении вахты
- •Раздел 4. Системы централизованного контроля судовых технических средств
- •1. Системы централизованного контроля стс
- •1.1. Основные сведения
- •1.2. Функции измерительных систем
- •1.3. Обобщенная структурная схема иис
- •1.4. Классификация судовых иис по назначению
- •1.5. Классификация судовых иис по построению ( структуре )
- •1.6. Принцип действия судовых иис
- •2. Интегрированная система управления и контроля geamar100 isl
- •2.2. Структура системы
- •2.3. Главная станция
- •2.3. Локальные станции и интерфейсы
- •2.5. Управление главной станцией, размещение информации на мониторе
- •2.6. Рабочая панель ват-415 локальной станции системы geamar
- •Дежурная система сигнализации ваа-40
- •2.8. Панель ват-425 в цпу ( на мостике )
- •2.9. Панель ват-426 в каютах механиков и в служебных помещениях
- •3. Судовая измерительная информационная система
- •3.1. Общая характеристика
- •3.2. Структурная схема иис «Шипка-м»
- •4. Системы автоматического измерения, регистрации и управления сбросом нефтепродуктов
- •4.1. Основные сведения
- •4.2. Система сепарации и контроля трюмно-балластных вод типа ск-10
- •4.3. Система измерения и контроля чистоты трюмно-балластных вод типа бвам
- •Раздел 5. Судовые электрические устройства связи, управления и сигнализации
- •1. Внутрисудовая связь
- •1.1. Основные сведения
- •1.2. Судовая телефонная связь
- •1.3. Виды систем служебной телефонной связи
- •1.6. Системы автоматической телефонной связи
- •2. Системы синхронной связи
- •2.1. Основные сведения
- •2.2. Устройство и принцип действия сельсинов
- •2.3. Принцип действия сисемы синхронной связи
- •2.4. Машинные телеграфы
- •2.5. Котельный и рулевой телеграфы
- •2.6. Указатели положения пера руля
- •3. Электрические сигнальные устройства и приборы
- •4. Общесудовые системы сигнализации
- •5. Судовая пожарная сигнализация
- •5.1. Основные сведения
- •5.3. Биметаллические пожарные извещатели
- •5.4. Ртутные термометры с электрическими контактами
- •5.5. Дымовые ( ионизационные) извещатели
- •5.6. Извещатель пламени
- •5.7. Схема пожарной сигнализации
- •6. Трюмная сигнализация
- •7. Тахометры
- •7.1. Основные сведения
- •7.2. Тахометры вольтметрового типа
- •7.3. Индукционные тахометры
- •8. Техническая эксплуатация судовых систем связи, управления и сигнализации
- •8. 1. Требования Правил Регистра к машинным электрическим телеграфам
- •8.2. Правила технической эксплуатация машинных телеграфов
- •8.3. Требования Правил Регистра к служебной телефонной связи
- •8.4. Требования Правил Регистра к авральной сигнализации
- •8.5. Правила технической эксплуатация систем служебной внутренней связи и авральной сигнализации
- •8.6. Требования Правил Регистра к сигнализации обнаружения пожара
- •8.7. Требования Правил Регистра к сигнализации предупреждения о пуске систем пожаротушения
- •8.8. Требования Правил Регистра к ручным извещателям пожарной сигнализации
- •8.9. Требования Правил Регистра к системам дымной сигнализации
- •8.10. Визуальные сигналы обнаружения пожара
- •8.11. Правила технической эксплуатации систем сигнализации обнаружения пожара и систем сигнализации о пуске системы объемного пожаротушения
- •Раздел 6. Судовое электрическое освещение и электронагревательные приборы
- •1. Основные понятия светотехники и характеристики
- •Источники света
- •2.1. Классификация источников
- •2.2. Лампы накаливания
- •2.3. Люминесцентные лампы низкого давления.
- •2.4. Люминесцентные лампы высокого давления.
- •2.5. Схемы включения люминесцентных ламп
- •2.6. Светильники и прожекторы
- •2.7. Судовые светильники
- •2.8. Судовые прожекторы
- •3. Расчет электрического освещения
- •3.1. Методы расчета электрического освещения
- •4. Световая сигнализация
- •4.1. Основные сведения
- •4.2. Коммутаторы сигнально-отличительных фонерей
- •4.3. Контактный коммутатор сигнально-отличительных фонерей
- •4.4. Бесконтактный коммутатор сигнально-отличительных фонерей
- •5. Электронагревательные приборы
- •5.1. Основные сведения
- •5.3. Индукционные нагревательные устройства
- •6. Техническая эксплуатация осветительных и электронагревательных приборов
- •6.1. Общие требования Правил Регистра к электрическому освещению
- •6.2. Требования Правил Регистра к питанию цепей основного освещения
- •6.3. Требования Правил Регистра к аварийному освещению
- •6.4. Требования Правил Регистра к сигнально-отличительным фонарям
- •6.5. Правила технической эксплуатации судового электрического освещения
- •6.6. Общие требования Правил Регистра к электрическим нагревательным и отопительным приборам
- •6.7. Требования Правил Регистра к отопительным приборам
- •6.8. Требования Правил Регистра к нагревательным устройствам для топлива и масла
- •6.9. Техническое обслуживание электронагревательных приборов
- •Раздел 7. Правила технической эксплуатации и техники безопасности при эксплуатации судово-
- •1. Правила технической эксплуатации судового электрооборудования
- •1.1. Общие положения Правил
- •1.2. Содержание электрооборудования в постоянной готовности к действию
- •1.3. Обслуживание электрооборудования в действии
- •2. Меры электробезопасности при эксплуатации судового электрообрудования
- •2.1. Основные положения
- •2.2. Причины и факторы поражения электрическим током
- •2.3. Электрические травмы
- •2.4. Оказание первой помощи пострадавшему от поражения электрическим током
- •2.5. Способы искусственного дыхания
- •Непрямой массаж сердца
- •3. Мероприятия по защите персонала от поражения электрическим током
- •3.1. Организационно-профилактические мероприятия по предупреждению поражения электрическим током
- •3.2. Конструктивные мероприятия по защите от поражения электрическим током
- •4. Пожарная безопасность при эксплуатации судового электрооборудования
- •Раздел 1. Судовые электроэнергетические системы__________32
- •Раздел 2. Судовые электрические приводы_____________________241
- •Раздел 1. Судовые электроэнергетические систе-
- •3. Системы регулирования частоты вращения генератор-
- •.3. Универсальные переключатели ______________________________________ 124
- •7. Предохранители____________________________________________________149
- •8. Реле защиты _______________________________________________________151
- •.3. Реле обратного тока_________________________________________ 153
- •.3. Техническое обслуживание выключателей и предохранителей____________ 163
- •Раздел 2. Судовые электрические приводы_______ 241
- •Способы пуска, регулирования частоты вращения и
- •Способы пуска, регулирования частоты вращения и торможения
- •3. Коммутационно-защитная аппаратура судовых
- •.3. Дисковые тормозные устройства______________________________________324
- •Раздел 3. Гребные электрические установки_____628
- •Раздел 4. Системы централизованного контроля судовых технических средств _____________________639
- •Раздел 5. Судовые электрические устройства связи, управления и сигнализации________________660
- •Раздел 6. Судовое электрическое освещение и электронагревательные приборы__________________692
- •Раздел 7. Правила технической эксплуатации и техники безопасности при эксплуатации судово-
4. Механизмы управления насосами постоянной подачи
4.1. Дроссельный механизм с управляющими электромагнитами
В качестве примера рассмотрим один из возможных вариантов механизма управ-ления - дроссельную систему с управляющими электромагнитами ( рис. 10.20).
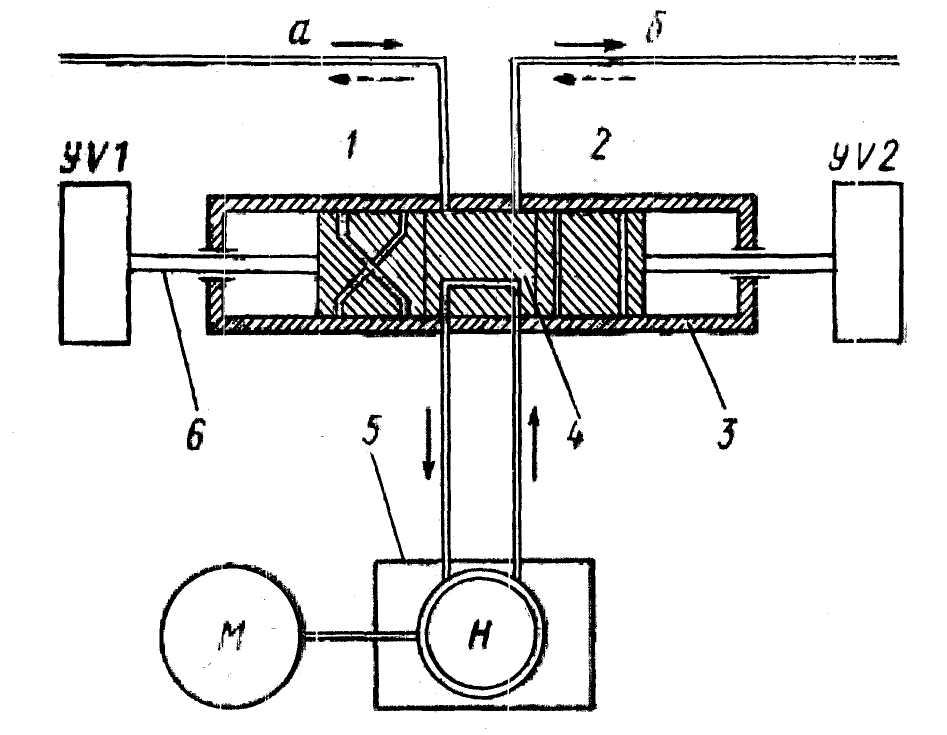
Рис. 10.20. Принципиальная схема дроссельного сервопривода с управляющими электромагнитами для управления насосами постоянной подачи
Органом смены направления подачи масла на выходе в каналах а и б, связанных с цилиндрами рулевой машины, является гидрозолотник ГЗ.
В цилиндре 3 располагается поршень 4, который выходными штоками 6 может перемещаться и занимать три разных положения. Штоки связаны с соленоидными электромагнитами YV1 и YV2, обеспечивающими возможность дистанционного управле-
ния.
При выключенных электромагнитах посредством пружин поршень устанавлиается в среднем положении, что показано на рис. 10.20. В этом случае масляные каналы гидрозолотника связывают всасывающую и нагнетающую магистрали насоса Н, постоянно вращаемого электродвигателем М. Магистрали а, б силовых цилиндров рулевой машины перекрыты. Масло забирается насосом из бака 5 и сливается снова в бак. Вместимость бака должна быть достаточной, чтобы обеспечить отвод тепла, выделяемого в данном режиме холостой прокачки масла.
В технике гидропривода описываемая система относится к классу гидравлических сервомеханизмов дроссельного управления. Этим устройствам свойственны: быстродействие, большой коэффициент усиления, высокая долговечность и надежность в работе.
При подаче питания в электромагнит YV2 поршень смещается вправо, его секция 1 устанавливается в средней части цилиндра, обеспечивая связь магистралей насоса и цилиндров рулевой машины. Причем магистраль а становится напорной, а магистраль б - сливной. Происходит перекладка руля на правый борт.
При отключении электромагнита YV2 золотник 4 возвращается в исходное положение, перекладка прекращается.
Включением электромагнита YV1 поршень перемещается влево. В среднюю часть цилиндра становится секция 2. Напорной становится магистраль б. Руль перекладывается на левый борт.
Описываемая принципиальная система применена для управления рулем теплоходов типа «Инженер Мачульский».
Имеются схемы, в которых перемещение золотника осуществляется посредством сервогидропривода или вручную. В некоторых случаях рассматриваемый механизм сам используется как один из промежуточных каскадов управления сервоприводом устройств большой выходной мощности. Например, на лесовозах типа «Иршалес», танкерах серии «Леонардо да Винчи» дроссельный сервопривод используется для управления насосами регулируемой подачи.
4.2. Дроссельный механизм с электромашинным приводом
Применяется в отечественных авторулевых АТР, «АИСТ», «Печора», авторулевых «Функверк Кёпеник», выпускаемых в ГДР. На рис. 10.19 показана схема кинематического механизма, имеющего заводской индекс ИМ-2, предназначенного для управления насосами нерегулируемой подачи в схеме АТР.

Рис. 10.21. Кинематическая схема исполнительного механизма ИМ-2 для управления насосами постоянной подачи РЭГ-приводов
Электродвигатель 1 через шестеренчатую механическую передачу 4 перемещает выходную рейку 5, связанную с дросселирующим золотником. При отключении электро-
двигателя пружинами 6 нулевого установителя золотник возвращается в исходное положе
ние.
Для уменьшения времени возврата и соответственно сокращения выбега руля кинематическая связь серводвигателя 1 и рейки 5 на этот период может быть разорвана посред
ством электромагнитной муфты 2. Исследования показали, что эффективность работы муфты сравнительно невелика. Поэтому в управляющих механизмах авторулевых «АИСТ», «Печора» от ее использования отказались.
Максимальное перемещение выходного органа регулируется механическим ограничителем 9.
Пружинная муфта проскальзывания 3 исключает стоянку серводвигателя под током при достижении предельного положения.
Рукоятка 10 служит для местного ( аварийного ) ручного управления рулем непосредственно из румпельного отделения.
Обратная связь по положению управляющей рейки осуществляется от сельсина-трансформатора 8.