

- •1. Краткий исторический очерк развития судового электрооборудования. Комплексы су стс. Классы автоматизации судов а1, а2, а3
- •2. Международные морские нормативные документы, определяющие уровень подготовки судовых механиков в части эксплуатации сэо
- •3. Международные и национальные морские классификационные общества.
- •4. Условия работы судового электрооборудования. Требования Правил
- •5. Требования морских нормативных документов к конструкции судового
- •6.1. Классификация судового оборудования в зависимости от климатических условий района плавания
- •6.2. Классификация электрооборудования в зависимости от места расположе-
- •6.3. Классификация электрооборудования в зависимости от степени защищен-
- •6.4. Классификация судового оборудования в зависимости от особых условий работы эксплуатации
- •Классификация судового электрооборудования в зависимости от способа
- •6.6. Классификация судового электрооборудования в зависимости от режимов работы
- •7. Условия выбора электродвигателей для судовых электроприводов
- •8. Системы буквенно-цифровых обозначений электрооборудования Промышленность выпускает различные виды электрооборудования сериями.
- •9. Международная система единиц физических величин
- •10. Единицы, часто применяемые в судовой электротехнике
- •11. Рекомендации по изучению дисциплины
- •Раздел 1. Судовые электроэнергетические системы
- •1. Общая характеристика судовых электроэнергетических систем
- •1. Классификация судового электрооборудования
- •2. Расположение основных элементов электрооборудования на судне
- •3. Основные термины и определения в сээс
- •4. Классификация сээс
- •5. Структурные схемы судовых электроэнергетических систем ( сээс )
- •6. Структурные схемы судовых электростанций ( сэс )
- •7. Параметры сээс
- •8. Качество электроэнергии, производимой сээс
- •9. Приемники электроэнергии сээс
- •Контрольные вопросы
- •2. Режимы работы сээс. Генераторные агрегаты
- •1. Режимы работы судна
- •2. Режимы работы приемников электроэнергии
- •3. Методы определения мощности сэс
- •3.1. Основные сведения
- •3.2. Табличный метод определения мощности сэс
- •3.3. Выбор количества и мощности генераторов в режимах работы судна
- •3.4. Экономическая эффективность сэс
- •3.5. Методы повышения экономичности сэс
- •4. Генераторные агрегаты
- •4.1. Основные сведения
- •4.2. Приводные двигатели генераторных агрегатов
- •5. Генераторы переменного тока
- •5.1. Эксплуатационные характеристики
- •5.2. Системы возбуждения синхронных генераторов
- •5.3. Основные типы судовых сг
- •5.4. Техническое обслуживание и ремонт судовых генераторов
- •1.3. Системы регулирования частоты вращения генератор-
- •1. Системы регулирования частоты вращения га
- •1.1. Необходимость использования арч
- •1.2. Основные характеристики арч
- •1.3. Регуляторные характеристики арч
- •1.4. Скоростные характеристики арч
- •1.5. Классификация арч
- •1.6. Применение разных типов арч
- •1.7. Изменение положения регуляторных характеристик арч
- •1.8. Требования Правил Регистра к пд га
- •1.9. Требования Правил Регистра к распределение активной и реактивной нагрузки при параллельной работе генераторов
- •2. Системы возбуждения и автоматического регулирования напряжения синхронных генераторов
- •2.1. Причины, влияющие на напряжение судовых синхронных генераторов
- •2.2. Компенсация действия причин, вызывающих изменение напряжения синхронных генераторов
- •2.3. Требования международных и национального классификационных обществ к судовым арн
- •2.4. Требования Правил Регистра к сохранению работоспособности судовых приемников электроэнергии при колебаниях напряжения и частоты тока сети
- •3. Принципы построения систем автоматического регулирования напряжения
- •Основные сведения
- •3.3. Системы арн , действующие по отклонению
- •3.4. Комбинированные сварн
- •Реактивные компенсаторы
- •Основные сведения
- •5. Контуры коррекции напряжения синхронных генераторов
- •5.1. Основные сведения
- •5.2. Контуры частотной коррекции
- •5.3. Контуры температурной компенсации
- •6. Система возбуждения и автоматического регулирования напряжения синхронных генераторов типа мсс
- •7. Бесщеточные синхронные генераторы
- •8. Характерные неисправности сварн
- •9. Параллельная работа синхронных генераторов
- •9.1. Особенности параллельной работы
- •9.2. Понятия «перевод нагрузки» и «распределение нагрузки»
- •10. Синхронизация синхронных генераторов
- •10.1. Основные сведения
- •10.2. Условия синхронизации синхронных генераторов
- •11. Методы синхронизации синхронных генераторов
- •11.1. Метод точной синхронизации
- •11.2. Синхроноскопы
- •11.3. Метод грубой синхронизации
- •11.4. Метод самосинхронизации
- •Синхронизаторы
- •Основные сведения
- •12.2. Блок синхронизации генераторов типа бсг
- •Распределение активной нагрузки
- •13.1. Основные сведения
- •13.2. Системы распределения активной нагрузки с базовым генератором
- •13.3. Системы распределения активной накгрузки с повышенной точностью регулирования скорости
- •Распределение реактивной нагрузки
- •14.1. Основные сведения
- •14.2. Автоматическое распределение реактивной нагрузки сг
- •15. Параллельная работа генераторов постоянного тока
- •15.1. Условия включения генераторов постоянного тока на параллельную работу
- •15.2. Последствия нарушения условий включения гпт на параллельную работу
- •15.3. Перевод и распределение нагрузки
- •15.4. Уравнительная шина
- •1.4. Судовые распределительные устройства и коммутаци-
- •1. Судовые распределительные устройства
- •1.1. Классификация судовых распределительных устройств
- •1.3. Требования Правил Регистра к схемам гэрщ
- •1.4. Схема главного распределительного щита
- •1.5. Схема генераторной секции гэрщ
- •Требования Правил Регистра к конструкции распределительных
- •2. Коммутационные аппараты распределительных устройств
- •2.1. Основные сведения
- •2.2. Рубильники, выключатели и переключатели
- •2.3. Универсальные переключатели
- •2.4. Универсальные переключатели без разрыва тока
- •2.5. Промышленные типы пакетных выключателей и переключателей
- •3. Коммутационно-защитная аппаратура распределительных устройств
- •3.1. Автоматические выключатели
- •3.2. Классификация ав
- •По типам расцепителей:
- •3.3. Устройство автоматического выключателя
- •Исходное состояние выключателя
- •Включение выключателя
- •4. Расцепители автоматических выключателей
- •4.1. Основные сведения
- •4.2. Электромагнитный расцепитель ав
- •4.3. Комбинированный расцепитель ав
- •4.4. Минимальный расцепитель ав ( по напряжению )
- •4.5. Независимый расцепитель
- •5. Характеристики автоматических выключателей
- •6. Промышленные типы автоматических выключателей
- •6.1. Основные сведения
- •6.2. Автоматические выключатели генераторов
- •Автоматические выключатели приемников электроэнергии
- •6.5. Выключатели приемников электроэнергии серии а3300
- •6.6. Выключатели приемников электроэнергии серии ак50
- •7. Предохранители
- •Устройство и принцип действия предохранителей
- •8. Реле защиты
- •8.1. Основные сведения
- •8.2. Реле тока
- •8.3. Реле обратного тока
- •Примечание
- •Обмотка напряжения реле рассчитана на 48 в, поэтому при использовании реле с напряжением 110 и 220 в последовательно с катушкой включается добавочный резистор
- •8.4. Реле обратной мощности типа им-149
- •8.5. Реле перегрузки типа им-145
- •8.6. Бесконтактное реле обратного активного тока типа рот-51/401
- •9. Требования Правил Регистра к уставкам реле защиты от обратного тока или обратной мощности
- •10. Техническая эксплуатация распределительных устройств и аппаратов
- •10.1. Техническое обслуживание распределительных устройств
- •10.2. Техническое обслуживание автоматических выключателей
- •10.3. Техническое обслуживание выключателей и предохранителей
- •1.5. Аварийное электроснабжение
- •1. Аварийные электростанции
- •1.1. Состав приемников электроэнергии аварийных электростанций
- •1. 2. Размещение аварийной сэс
- •1.3. Особенности электроснабжения грузовых и пассажирских судов
- •1.4. Принципиальная схема аэрщ
- •1.5. Источники питания аварийных сэс
- •1. 6. Схема программного управления пуском адг
- •2. Обеспечение непрерывности электроснабжения
- •2.1. Основные сведения
- •2.2. Обеспечение непрерывности электроснабжения при помощи аварийной сэс
- •2.3. Обеспечение непрерывности электроснабжения переключением питания
- •3. Судовые аккумуляторы и гальванические элементы
- •3.1. Основные сведения
- •3.2. Кислотные аккумуляторы
- •3.3. Щелочные аккумуляторы
- •3.4. Выбор и размещение аккумуляторов
- •3.5. Зарядно-питающие устройства аккумуляторов
- •3.6. Правила техники безопасности при эксплуатации аккумуляторов
- •1.6. Распределение электроэнергии по судну
- •1. Судовые электрические сети
- •1.1. Классификация электрических сетей
- •1.2. Сравнение свойств судовых электрических сетей
- •Судовые кабели и провода
- •2.1. Основные сведения
- •2.2. Расчет кабелей по току нагрузки, их выбор и проверка
- •2.4. Выбор площади поперечного сечения жил кабелей
- •2.5. Проверка кабелей на потерю напряжения
- •2.6. Требования Правил Регистра к значениям падения напряжения в линиях электропередач
- •2.7. Методы прокладки кабелей
- •Защита приемников электроэнергии и электрических сетей
- •3.1. Основные сведения
- •3.2. Защитные устройства электрических сетей и приемников электроэнергии
- •3.3. Избирательность ( селективность ) защиты электрических сетей
- •Сопротивление изоляции кабелей и проводов
- •Основные понятия
- •5. Измерение сопротивления изоляции
- •5.1. Измерение сопротивления изоляции сэс, не находящегося под напряже-
- •5.2. Индукторный мегаомметр типа м1101
- •5.3. Безындукторный мегаомметр типа бм-1
- •5.4. Правила измерения сопротивления изоляции
- •5.5. Измерение сопротивления изоляции кабелей и проводов
- •5.6. Типы переносных мегаомметров
- •5.7. Измерение сопротивления изоляции сэо, находящегося под напряжением
- •5.8. Автоматизированные методы контроля сопротивления изоляции
- •5.9. Автоматическая система диагностирования изоляции
- •Сушка электрических машин
- •6.1. Основные сведения
- •6.2. Способы сушки электрических машин
- •6.3. Сушка синхронных генераторов методом короткого замыкания
- •6.4. Сушка методом индукционного нагрева
- •6.5. Сушка обмоток электрических машин постоянным или однофазным пере-менным током
- •6.6. Сушка электрических машин внешним нагреванием
- •6.7. Сушка электрических машин на основе электрокинетического эффекта
- •7. Защита от помех радиоприему
- •7.1. Источники помех
- •7.2. Методы защиты от помех радиоприему
- •8. Техническая эксплуатация судовых электрических сетей
- •8.1. Особенности технической эксплуатации судовых электрических сетей
- •8.2. Электробезопасность при обслуживании электрических сетей
- •8.3. Пожарная безопасность при обслуживании электрических сетей
- •1.7. Автоматизация управления судовыми электроэнерге-
- •1. Системы управления сээс
- •1.1. Классификация систем управления сээс
- •1.2. Структурная схема системы управления сээс
- •1.3. Система управления сээс типа "Ижора-м"
- •1.4. Структура микропроцессорных систем управления сээс
- •1.5. Микропроцессорная су сээс типа аsа-s
- •2. Надежность, диагностирование и прогнозирование технического состояния су сээс
- •2.1. Основные сведения о надежности
- •2.2. Факторы, влияющие на надежность аппаратуры су сээс
- •2.3. Связь надежности и условий работы сээс. Способы повышения надеж-
- •2.4. Диагностирование и прогнозирование технического состояния су сээс
- •2.5. Характерные неисправности су сээс
- •2.6. Техническая эксплуатация автоматизированных устройств
- •Раздел 2. Судовые электрические приводы
- •2.1. Основы теории электропривода
- •1. Основные понятия
- •1.1. Понятие „электрический привод”
- •1. 2. Классификация электроприводов
- •1.3. Силы и моменты, действующие в системе электропривода
- •1.4. Виды статических моментов
- •1. 5. Приведение статических моментов к валу электродвигателя
- •1. 6. Режимы работы электроприводов
- •1. 7. Механические характеристики электродвигателей
- •1.8. Механические характеристики исполнительных механизмов
- •1.9. Изменение скорости электродвигателей
- •1. 10. Саморегулирование электродвигателей
- •1.11. Устойчивость работы электропривода
- •1.12. Влияние на устойчивость работы электродвигателя его эксплуатацион-
- •Влияние на устойчивость электропривода напряжения сети.
- •1.14. Способы повышения динамической устойчивости саэп
- •1.3. Реостатный пуск
- •2. Способы регулирования частоты вращения электродвигателей постоян-
- •2.1. Основные сведения
- •2.2. Регулирование скорости в системе «генератор – двигатель» ( г – д )
- •2.3. Регулирование скорости в системе двойного рода тока ( увп – д )
- •3. Электрическое торможение двигателей постоянного тока
- •3.1. Основные сведения
- •3.2. Динамическое торможение двигателя параллельного возбуждения
- •3.3. Рекуперативное торможение двигателя постоянного тока
- •Реверс двигателей постоянного тока
- •4.1. Основные сведения
- •4.2. Реверс изменением направления тока в обмотке якоря
- •Реверс изменением направления тока в параллельной обмотке возбужде-
- •1.3. Прямой пуск короткозамкнутых асинхронных двигателей специального исполнения
- •1.4. Реостатный пуск двигателей с фазным ротором
- •1.5. Пуск при пониженном напряжении на обмотке статора
- •2. Способы регулирования частоты вращения 3-фазных асинхронных двига-
- •2.1. Основные сведения
- •Регулирование скорости изменением числа пар полюсов обмотки статора.
- •2.3. Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора со «звезды» на «двойную звезду»
- •2.4. Регулирование скорости асинхронного двигателя изменением числа пар полюсов путем переключения обмотки статора с «треугольника» на «двойную звезду»
- •3. Электрическое торможение асинхронных двигателей
- •3.1. Основные сведения
- •3.2. Рекуперативное торможение асинхронных двигателей
- •Рекуперативное торможение при переходе с большей скорости на мень-
- •4. Реверс 3-фазных асинхронных электродвигателей
- •3. Коммутационно-защитная аппаратура судовых электропроиводов
- •1. Электрические аппараты
- •1.1. Основные сведения
- •1.2. Классификация электрических аппаратов
- •2. Командоаппараты
- •2.1. Основные сведения
- •2.2. Кнопочные посты управления
- •2.3. Командоконтроллеры
- •2.4. Конечные и путевые выключатели
- •Рычажные выключатели
- •Контроллеры
- •3.1. Основные сведения
- •3.2. Силовые контроллеры
- •Контакторы
- •Основные сведения
- •4.2. Классификация контакторов
- •4.3. Основные системы контакторов
- •4.4. Устройство и принцип действия контактора
- •4.5. Назначение контактов Контакты предназначены для непосредственной коммутации электрических цепей.
- •4.6. Изображение контактов При изображении контактов применяют следующие правила:
- •4.7. Электромагнитная система контакторов
- •4.8. Катушки контакторов
- •4.9. Короткозамкнутые витки
- •4.10. Дугогасительная система контакторов
- •4.11. Гашение дуги в дугогасительных камерах
- •4.12. Гашение дуги в контакторах постоянного тока
- •4.13. Гашение дуги в контакторах переменного тока
- •5. Реле тока и напряжения
- •5.1. Основные сведения
- •5.2. Реле напряжения
- •Устройство и принцип действия реле напряжения
- •6. Промежуточные реле
- •Основные сведения
- •6.2. Промежуточное реле типа мку-48
- •Реле времени
- •7.1. Основные сведения
- •7.2. Электродвигательные реле времени
- •Поэтому на судах электродвигательные реле времени не применяются.
- •7.3. Электромеханические реле времени
- •7.4. Электромагнитные реле времени
- •7.5. Электронные реле времени
- •7.6. Пневматические реле времени
- •7.7. Графическое изображение контактов реле времени
- •8. Реле с герметизированными магнитоуправляемыми контактами
- •9. Электротепловые реле
- •9.1. Основные сведения
- •9.2. Токовые тепловые реле
- •9.3. Температурные тепловые реле
- •9.4. Промышленные типы токовых электротепловых реле
- •Регулирование уставки ( тока срабатывания реле )
- •10. Реле контроля неэлектрических величин
- •10.1. Основные сведения
- •10.2. Реле давления
- •10.3. Реле скорости
- •10.4. Реле уровня
- •Тормозные устройства
- •11.1. Основные сведения
- •11.2. Ленточные тормозные устройства
- •11.3. Дисковые тормозные устройства Дисковые тормозные устройства широко применяются в электроприводах судовых
- •11.4. Колодочные тормозные устройства
- •11.5. Колодочный тормоз с электромагнитным приводом
- •11.6. Колодочный тормоз с электрогидравлическим приводом
- •4. Системы управления саэп. Система ескд. Типовые узлы, схемы и устройства управления электроприводами
- •1. Системы управления саэп
- •1.1. Основные сведения
- •1. 2. Элементная основа систем управления
- •1.3. Микропроцессорные системы управления. Основные сведения
- •1.4. Структурная схема микропроцессорной системы управления электропри-
- •1.5. Архитектура микропроцессора
- •2. Единая система конструкторсой документации. Классификация, построение и правила чтения электрических схем
- •2.1. Основные сведения
- •2.2. Классификационные группы ескд
- •2.3. Система обозначений стандартов
- •2.4. Классификация и обозначение схем
- •2.5. Краткая характеристика типов схем
- •2.6. Условные графические изображения элементов электрических схем
- •2.7. Условные буквенно-цифровые обозначения элементов электрических схем
- •5.8. Прочтение буквенно-цифровых обозначений элементов электрических схем
- •5.9. Условные функциональные обозначения на аппаратуре всех видов
- •3. Типовые узлы и схемы автоматического управления электродвигателей
- •3.1. Стандартные защиты судовых электроприводов
- •Причины и последствия снижения напряжения
- •Схемы защит по снижению напряжения
- •Нулевая защита Вариант №1
- •Управление 3-фазным асинхронным двигателем с одного и двух постов
- •Остановка
- •3.3. Схема автоматического пуска асинхронного двигателя переключением обмотки статора со звезды на треугольник
- •3.4. Схема автоматического пуска асинхронного электродвигателя через пусковые резисторы в цепи обмотки статора
- •Подготовка схемы к работе
- •3.5. Схема автоматического пуска асинхронного двигателя с фазным
- •4. Типовые комплектные устройства судовых электроприводов
- •4.1. Основные сведения
- •4.2. Реостаты
- •4.3. Магнитные пускатели
- •Подготовка схемы к работе
- •Работа схемы Пуск
- •Остановка
- •4.4. Станции управления и магнитные контроллеры
- •2.3. Электроприводы рулевых устройств
- •1. Рулевые электроприводы
- •1.1. Общая характеристика рулевых электроприводов
- •1.2. Принцип действия руля
- •1.3. Состав рулевого электропривода
- •1.4. Классификация рулевых электроприводов
- •2. Электромеханические передачи
- •3. Электрогидравлические передачи
- •3.1. Основные сведения
- •3.2. Насосы гидравлических рулевых машин
- •3.3. Насосы постоянной подачи
- •3.4. Насосы переменной подачи
- •Радиально-поршневые насосы
- •Рулевые машины с насосом постоянной подачи
- •3.6. Рулевые машины с насосами переменной подачи
- •3.7. Плунжерные рулевые машины
- •3.8. Лопастные рулевые машины
- •3.9. Поршневые машины с качающимися цилиндрами
- •4. Механизмы управления насосами постоянной подачи
- •4.1. Дроссельный механизм с управляющими электромагнитами
- •4.2. Дроссельный механизм с электромашинным приводом
- •5. Механизмы управления насосами переменной подачи
- •5.1. Основные сведения
- •5.2. Механизм управления нпп типа им-1
- •5.3. Механизм управления нпп с рычажным дифференциалом
- •5.4. Механизм управления нпп с кулачковым дифференциалом
- •5.5. Гидравлические и комбинированные механизмы управления нпп
- •6. Исполнительные устройства систем управления гидравлических рулевых машин
- •6.1. Основные сведения
- •6.2. Серводвигатели
- •6.3. Электромагнитные муфты
- •6.4. Нулевые установители
- •7. Приводные электродвигатели насосов постоянной и переменной подачи
- •8. Нагрузочные диаграммы рулеых электроприводов
- •9. Структурные схемы управления судов с использованием электромеха
- •9.1. Основные сведения
- •9.2. Структурная схема простого управления рулевым электроприводом
- •9.3. Структурная схема следящего управления рулевым электроприводом
- •10. Виды управления рулевыми электроприводами
- •11. Требования Конвенции solas-74 и Правил Регистра к рэп
- •11.1. Основные определения
- •11.3. Основные требования к авторулевым
- •12. Системы управления рулевыми электроприводами
- •12.1. Основные сведения
- •12.2. Система простого управления секторным рулевым электроприводом
- •Ется на транспортных судах типов «Волго-балт» и «Волго-Дон» ( рис. 10.23 ).
- •Основные элементы схемы
- •Работа схемы
- •12.3. Система следящего управления гидравлическим рулевым приводом Бесконтактная схема управления гидравлическим рулевым приводом применяется на пассажирских судах типа «Александр Пушкин».
- •12.4. Система автоматического управления рулевым электроприводом
- •13.Электроприводы специального назначения
- •13.1. Основные сведения
- •Подруливающие устройства
- •Успокоители качки
- •14. Техническая эксплуатация рулевых электроприводов
- •14.1. Подготовка рулевого и подруливающего устройств и авторулевого перед выходом в рейс
- •14.2. Техническое использование рулевого устройства
- •14.3. Техническое использование авторулевого
- •14.4. Техническое обслуживание рулевого привода
- •2.4. Электроприводы судовых нагнетателей
- •1. Cудовые нагнетатели
- •1.1. Общая характеристика судовых нагнетателей
- •1.2. Классификация нагнетателей
- •1.3. Основные параметры
- •2. Центробежные нагнетатели
- •2.1. Общая характеристика
- •2.2. Рабочие характеристики центробежных нагнетателей
- •2.3. Характеристика сопротивления нагнетательной системы
- •2.4. Совместная работа нагнетателей
- •Влияние скорости на мощность электродвигателя центробежного нагне-
- •3. Устройство, принцип действия, эксплуатация судовых нагнетателей
- •3.1. Центробежные насосы
- •3.2. Поршневые насосы
- •3.3. Осевые ( пропеллерные ) насосы
- •3.4. Ротационные насосы
- •3.5. Выбор электродвигателей для насосов
- •3.6. Судовые вентиляторы
- •3.7.Компрессоры
- •3.8. Практические формулы для расчет мощности электродвигателей насосов, вентиляторов и компрессоров
- •Решение
- •Решение
- •3.9. Требования Правил Регистра к электроприводам насосов и ветиляторов
- •4. Системы управления электроприводами нагнетателей
- •4.1. Основные сведения
- •4.2. Схема автоматического управления электроприводом центробежного насоса
- •4.3. Принципиальная схема управления электроприводом осушительного насоса
- •4.4. Схема автоматического управления и резервирования электроприводами насосов машинного отделения
- •4.5. Схема автоматического управления компрессором пускового воздуха Основные сведения
- •Подготовка схемы к работе
- •Ходовой режим
- •Режим манёвров
- •Бесконтактные схемы управления электроприводами нагнетателей
- •Логический элемент «да»
- •Логический элемент «не»
- •Логический элемент «и»
- •Логический элемент «или»
- •Логический элемент «и-не»
- •Исходное состояние схемы
- •Работа схемы
- •Остановка двигателя
- •5. Техническая эксплуатация судовых нагнетателей
- •Электроприводы якорно-швартовных устройстве
- •1. Назначение якорно-швартовных устройств
- •2. Классификация якорно-швартовных устройств
- •3. Рабочий механизм якорно-швартовных устройств
- •4. Устройство яшу
- •4.1. Брашпили
- •4.2. Якорно-швартовные лебедки
- •4.3. Шпили
- •4.4. Швартовные лебедки
- •5. Количественные характеристики яшу
- •6. Виды управления яшу
- •7. Особенности работы электроприводов яшу
- •8. Нагрузочные диаграммы электропривода якорно-швартовных устройств Нагрузочной диаграммой электропривода называют зависимость мощности, тока или момента электродвигателя от времени.
- •8.1. Режим подъёма одного якоря.
- •8.2. Режим подъёма 2-х якорей
- •8.3. Швартовный режим
- •9. Характеристики якорного и швартовного снабжения судов
- •9.2. Характеристика швартовного снабжения судов
- •10. Требования Правил Регистра к якорным и швартовным электроприводам
- •11. Системы управления яшу
- •11.1. Рекомендации по выбору систем электроприводов якорно-швартовных устройств
- •11.2. Система управления яшу с 3-скоростным асинхронным двигателем
- •Подготовка схемы к работе
- •Работа схемы
- •11.3. Система управления электроприводом брашпиля по системе генератор-двигатель
- •Описание принципиальной схемы
- •11.4. Система управления яшу на переменном токе Основные сведения
- •2 Скорость
- •3 Скорость
- •11.5. Система управления электроприводом шпиля фирмы «Сименс» Основные сведения
- •Основные элементы схемы.
- •Подготовка схемы к работе
- •Работа схемы
- •1 Скорость
- •2 Скорость
- •3 Скорость
- •11.6. Система дистанционной отдачи якоря
- •На современных транспортных судах применяют 2 вида управления отдачей якоря:
- •Подготовка схемы к работе
- •Работа схемы Предварительный этап
- •12. Техническая эксплуатация электроприводов яшу
- •2.6. Электроприводы судовых грузоподъемных механизмов
- •1. Основные сведения
- •2. Устройство гпм
- •2.1. Грузовая стрела
- •2.2. Грузовая лебедка
- •2.3. Грузовые краны
- •3. Нагрузочные диаграммы электроприводов гпм
- •3.1. Нагрузочная диаграмма при работе одной лебедки
- •3.2. Нагрузочная диаграмма при работе двух лебедок
- •3.3. Нагрузочные диаграммы механизмов грузового крана
- •4. Условия работы гпм
- •5. Режимы работы гпм
- •6. Требования Правил Регистра к электроприводам грузоподъемных механизмов
- •7. Технико-экономические характеристики электроприводов гпм переменного тока
- •8. Пуско-регулирующая аппаратура электроприводов гпм
- •9. Защитные устройства электроприводов гпм
- •9.1. Основные сведения
- •9.2. Защитные устройства от токов короткого замыкания
- •9.3. Защитные устройства от токов перегрузки
- •10.4. Защита по снижению напряжения
- •10. Тормозные устройства гпм
- •10.1. Основные сведения
- •10.2. Ленточные тормозные устройства
- •10.3. Дисковые тормозные устройства Дисковые тормозные устройства широко применяются в электроприводах судовых
- •10.4. Колодочные тормозные устройства
- •11. Системы управления электрическими палубными кранами
- •11.1. Система управления электроприводом механизма подъема грузового крана фирмы «Сименс»
- •Подготовка схемы к работе
- •Работа схемы Алгоритм работы схемы Алгоритм работы схемы крайне прост:
- •1 Скорость
- •2 Скорость
- •3 Скорость
- •Рекуперативное торможение электродвигателя
- •Защита от обрыва фазы
- •Блокировка по положению воздушной заслонки
- •Блокировка по длине троса на грузовом барабане
- •11.2. Система управления электроприводом поворота грузового крана фирмы «Сименс»
- •Подготовка схемы к работе
- •Работа схемы
- •Остановка
- •Защита от токов короткого замыкания
- •Защита от токов перегрузки
- •Защита от токов перегрузки при динамическом торможении
- •Защита по снижению напряжения
- •Защита от обрыва фазы
- •11.3. Система управления электроприводом изменения вылета стрелы грузового крана фирмы «Сименс»
- •Алгоритм работы схемы Алгоритм работы схемы крайне прост:
- •2 Скорость
- •Защита от обрыва фазы
- •Блокировка по положению гака относительно нока стрелы
- •12. Системы управления электрогидравлическими палубными кранами
- •12.1. Основные сведения
- •12.2. Характеристики и устройство кранов
- •12.3. Управление приводами гидравлических кранов. Станции управления
- •12.4. Гидросхемы электрогидравлических кранов
- •12.5. Гидросхема грейферного судового крана Либхер
- •12.6. Основные машины электрогидравлических кранов
- •12.7. Механизм поворота
- •12.8. Подвеска каната
- •12.9. Поворотная опора крана
- •12.10. Привод насосов крана
- •12.11. Дисковый гидравлический тормоз
- •12.12. Лебедка крана Либхер
- •12.13. Редуктор привода насосов крана Либхер
- •12.14. Системы управления электрогидравлическими кранами
- •12.15. Механическая система управления краном
- •12.16. Электрическая система управления кранов кэг
- •13. Техническая эксплуатация электрогидравлических кранов
- •13.1. Обеспечение надежности и безотказности электрогидравлических кранов
- •13.2. Мероприятия по поддержанию качества масла гидравлических кранов
- •13.3. Техническое обслуживание электрогидравлических кранов
- •15. Бесконтактные системы управления электроприводами гпм
- •15.1. Основные сведения
- •15.2. Тиристорные коммутаторы
- •15.3. Блок контроля исправности тиристоров
- •15.4. Особенности построения схем на тиристорных коммутаторах
- •15.5. Бесконтактная система управления электроприводом грузовой лебедки
- •16. Техническое обслуживание электроприводов гпм
- •Раздел 3. Гребные электрические установки
- •1. Классификация гэу
- •2. Гэу постоянного тока
- •2.1. Основные сведения
- •2.2. Схемы включения генераторов и гребных двигателей гэу постоянного тока
- •2.3. Принципиальная схема дизельной электрической установки (дгэу) на постоянном токе
- •3. Гэу переменного тока
- •3.1. Типы гребных электродвигателей
- •3.3. Способы регулирования скорости гребных электродвигателей
- •3.4. Реверс гэд
- •3.5. Структурные схемы гэу переменного тока
- •3.6. Принципиальная схема одновальной тэгу на переменном токе
- •4. Гэу двойного рода тока
- •4.1. Основные сведения
- •4.2. Структурная схема гэу двойного рода тока с неуправляемым выпрямителем
- •4.3. Гэу двойного рода тока с врш
- •4.4. Сравнение эксплуатационных свойств гэу двойного рода тока и гэу постоянного и переменного тока
- •Техническая эксплуатация гэу
- •5.1. Основные сведения
- •5.3. Подготовка гэу к работе
- •5.4. Опробование гэу в работе
- •5.5. Наблюдение за работой гэу при несении вахты
- •Раздел 4. Системы централизованного контроля судовых технических средств
- •1. Системы централизованного контроля стс
- •1.1. Основные сведения
- •1.2. Функции измерительных систем
- •1.3. Обобщенная структурная схема иис
- •1.4. Классификация судовых иис по назначению
- •1.5. Классификация судовых иис по построению ( структуре )
- •1.6. Принцип действия судовых иис
- •2. Интегрированная система управления и контроля geamar100 isl
- •2.2. Структура системы
- •2.3. Главная станция
- •2.3. Локальные станции и интерфейсы
- •2.5. Управление главной станцией, размещение информации на мониторе
- •2.6. Рабочая панель ват-415 локальной станции системы geamar
- •Дежурная система сигнализации ваа-40
- •2.8. Панель ват-425 в цпу ( на мостике )
- •2.9. Панель ват-426 в каютах механиков и в служебных помещениях
- •3. Судовая измерительная информационная система
- •3.1. Общая характеристика
- •3.2. Структурная схема иис «Шипка-м»
- •4. Системы автоматического измерения, регистрации и управления сбросом нефтепродуктов
- •4.1. Основные сведения
- •4.2. Система сепарации и контроля трюмно-балластных вод типа ск-10
- •4.3. Система измерения и контроля чистоты трюмно-балластных вод типа бвам
- •Раздел 5. Судовые электрические устройства связи, управления и сигнализации
- •1. Внутрисудовая связь
- •1.1. Основные сведения
- •1.2. Судовая телефонная связь
- •1.3. Виды систем служебной телефонной связи
- •1.6. Системы автоматической телефонной связи
- •2. Системы синхронной связи
- •2.1. Основные сведения
- •2.2. Устройство и принцип действия сельсинов
- •2.3. Принцип действия сисемы синхронной связи
- •2.4. Машинные телеграфы
- •2.5. Котельный и рулевой телеграфы
- •2.6. Указатели положения пера руля
- •3. Электрические сигнальные устройства и приборы
- •4. Общесудовые системы сигнализации
- •5. Судовая пожарная сигнализация
- •5.1. Основные сведения
- •5.3. Биметаллические пожарные извещатели
- •5.4. Ртутные термометры с электрическими контактами
- •5.5. Дымовые ( ионизационные) извещатели
- •5.6. Извещатель пламени
- •5.7. Схема пожарной сигнализации
- •6. Трюмная сигнализация
- •7. Тахометры
- •7.1. Основные сведения
- •7.2. Тахометры вольтметрового типа
- •7.3. Индукционные тахометры
- •8. Техническая эксплуатация судовых систем связи, управления и сигнализации
- •8. 1. Требования Правил Регистра к машинным электрическим телеграфам
- •8.2. Правила технической эксплуатация машинных телеграфов
- •8.3. Требования Правил Регистра к служебной телефонной связи
- •8.4. Требования Правил Регистра к авральной сигнализации
- •8.5. Правила технической эксплуатация систем служебной внутренней связи и авральной сигнализации
- •8.6. Требования Правил Регистра к сигнализации обнаружения пожара
- •8.7. Требования Правил Регистра к сигнализации предупреждения о пуске систем пожаротушения
- •8.8. Требования Правил Регистра к ручным извещателям пожарной сигнализации
- •8.9. Требования Правил Регистра к системам дымной сигнализации
- •8.10. Визуальные сигналы обнаружения пожара
- •8.11. Правила технической эксплуатации систем сигнализации обнаружения пожара и систем сигнализации о пуске системы объемного пожаротушения
- •Раздел 6. Судовое электрическое освещение и электронагревательные приборы
- •1. Основные понятия светотехники и характеристики
- •Источники света
- •2.1. Классификация источников
- •2.2. Лампы накаливания
- •2.3. Люминесцентные лампы низкого давления.
- •2.4. Люминесцентные лампы высокого давления.
- •2.5. Схемы включения люминесцентных ламп
- •2.6. Светильники и прожекторы
- •2.7. Судовые светильники
- •2.8. Судовые прожекторы
- •3. Расчет электрического освещения
- •3.1. Методы расчета электрического освещения
- •4. Световая сигнализация
- •4.1. Основные сведения
- •4.2. Коммутаторы сигнально-отличительных фонерей
- •4.3. Контактный коммутатор сигнально-отличительных фонерей
- •4.4. Бесконтактный коммутатор сигнально-отличительных фонерей
- •5. Электронагревательные приборы
- •5.1. Основные сведения
- •5.3. Индукционные нагревательные устройства
- •6. Техническая эксплуатация осветительных и электронагревательных приборов
- •6.1. Общие требования Правил Регистра к электрическому освещению
- •6.2. Требования Правил Регистра к питанию цепей основного освещения
- •6.3. Требования Правил Регистра к аварийному освещению
- •6.4. Требования Правил Регистра к сигнально-отличительным фонарям
- •6.5. Правила технической эксплуатации судового электрического освещения
- •6.6. Общие требования Правил Регистра к электрическим нагревательным и отопительным приборам
- •6.7. Требования Правил Регистра к отопительным приборам
- •6.8. Требования Правил Регистра к нагревательным устройствам для топлива и масла
- •6.9. Техническое обслуживание электронагревательных приборов
- •Раздел 7. Правила технической эксплуатации и техники безопасности при эксплуатации судово-
- •1. Правила технической эксплуатации судового электрооборудования
- •1.1. Общие положения Правил
- •1.2. Содержание электрооборудования в постоянной готовности к действию
- •1.3. Обслуживание электрооборудования в действии
- •2. Меры электробезопасности при эксплуатации судового электрообрудования
- •2.1. Основные положения
- •2.2. Причины и факторы поражения электрическим током
- •2.3. Электрические травмы
- •2.4. Оказание первой помощи пострадавшему от поражения электрическим током
- •2.5. Способы искусственного дыхания
- •Непрямой массаж сердца
- •3. Мероприятия по защите персонала от поражения электрическим током
- •3.1. Организационно-профилактические мероприятия по предупреждению поражения электрическим током
- •3.2. Конструктивные мероприятия по защите от поражения электрическим током
- •4. Пожарная безопасность при эксплуатации судового электрооборудования
- •Раздел 1. Судовые электроэнергетические системы__________32
- •Раздел 2. Судовые электрические приводы_____________________241
- •Раздел 1. Судовые электроэнергетические систе-
- •3. Системы регулирования частоты вращения генератор-
- •.3. Универсальные переключатели ______________________________________ 124
- •7. Предохранители____________________________________________________149
- •8. Реле защиты _______________________________________________________151
- •.3. Реле обратного тока_________________________________________ 153
- •.3. Техническое обслуживание выключателей и предохранителей____________ 163
- •Раздел 2. Судовые электрические приводы_______ 241
- •Способы пуска, регулирования частоты вращения и
- •Способы пуска, регулирования частоты вращения и торможения
- •3. Коммутационно-защитная аппаратура судовых
- •.3. Дисковые тормозные устройства______________________________________324
- •Раздел 3. Гребные электрические установки_____628
- •Раздел 4. Системы централизованного контроля судовых технических средств _____________________639
- •Раздел 5. Судовые электрические устройства связи, управления и сигнализации________________660
- •Раздел 6. Судовое электрическое освещение и электронагревательные приборы__________________692
- •Раздел 7. Правила технической эксплуатации и техники безопасности при эксплуатации судово-
2.2. Регулирование скорости в системе «генератор – двигатель» ( г – д )
Система Г-Д как минимум состоит из трех электрических машин:
1. исполнительного электродвигателя М2, приводящего в действие механизм;
2. генератора G1, питающего исполнительный ЭД;
3. приводного электродвигателя Ml, вращающего якоря генератора G1 и образую-
щего с ним так называемый преобразователь.
Машины М2 и G1 - постоянного тока с независимым возбуждением.
Несмотря на это, система Г-Д может применяться при любом роде тока питающей сети.
Если сеть постоянного тока, то в качестве приводного двигателя М1 применяют ЭД параллельного возбуждения, а обмотки возбуждения всех машин получают питание от сети.
Если сеть переменного тока, используют асинхронный приводной ЭД. Для питания обмоток возбуждения L1G1 и LM2 в этом случае применяют четвертую машину – возбуди
тель G2. Это небольшой генератор постоянного тока с самовозбуждением. Он приводится во вращение тем же приводным электродвигателем М1 , что и генератор G1 ( рис. 9.3 ).

Рис. 9.3. Схема системы генератор – двигатель
Система действует следующим образом.
Сначала пускают приводной ЭД М1, якорь которого затем вращается постоянно в одну сторону с неизменной скоростью. Потом при помощи регулировочного резистора
( реостата возбуждения ) RP3 возбуждают возбудитель G2, создающий неизменное напря-
жение.
От него получают питание независимые обмотки возбуждения исполнительного электродвигателя LM2 и генератора L1G1.
В цепь первой включен регулировочный резистор RP2, в цепь второй – регулиро-
вочный резистор RP1 и переключатель SA, изменяющий направление тока в обмотке L1G1.
Перед пуском резистор RP1 должен быть полностью введен в цепь, а резистор RP2 - выведен.
Для пуска М2 переключатель SA устанавливают в одно из рабочих положений и
постепенно выводят резистор RP1, увеличивая этим ток возбуждения в обмотке L1G1.
Последний возбуждается и подает плавно возрастающее напряжение на якорную обмотку М2. По цепи якорей G1 и М2 протекает ток.
Так как М2 возбужден, его якорь начинает вращаться, и по мере возрастания напря-
жения, подведенного к его якорю, увеличивается угловая скорость. При полностью выве-
денном резисторе RP1 напряжение G1 и угловая скорость М2 номинальные.
Для реверса переключателем SA изменяют направление тока в обмотке возбужде-
ния L1G1. Генератора изменяет полярность напряжения, ток якорной цепи изменяет на-
правление, и исполнительный двигатель М2 реверсируется.
Регулирование скорости вниз от номинальной выполняют, вводя в цепь обмотки возбуждения L1G1 регулировочный резистор RP1. Ток возбуждения, магнитный поток и напряжение генератора уменьшаются. Вследствие этого снижается напряжение, подведенное к обмотке якоря М2, и его угловая скорость уменьшается ( характеристики 3, 2 и 1 на
рис. 9.4 ).
Регулирование скорости вверх от номинальной осуществляют, вводя в цепь обмот-
ки возбуждения М2 регулировочный резистор RP2, что уменьшает ток и поток возбужде-
ния, при этом скорость ЭД увеличивается ( характеристики 5, 6 и 7 на рис. 9.4 ).
Рассмотренная система называется «система Г – Д в чистом виде» и на практике не применяется. Это объясняется тем, что при работе с номинальным напряжением на якоре М2 внезапная остановка этого якоря ( например, под винт попала льдина ) приводит к рез-
кому увеличению тока якорей двигателя М2 и генератора G1 до значения, равного пуско-
вому.
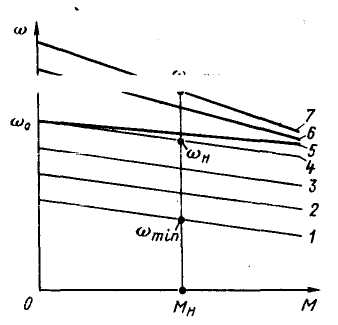
Рис. 9.4. Механические характеристики исполнительного двигателя
в системе генератор – двигатель: 4 – естественная; 3, 2 и 1 – искусственные, полученные уменьшение напряжения на обмотке якоря М2; 5, 6 и 7 –искусствен-
ные, полученные ослаблением магнитного потока М2
Кроме того, такое увеличение тока приводит к увеличению нагрузки на приводной двигатель генератора. Это особенно опасно, если генератор G1 приводится во вращение дизелем. Как известно, дизели крайне чувствительны к перегрузкам ( не более 10% мощ-
ности в течение 1 часа ).
Поэтому на судах применяют систему Г-Д с противокомпаундным генератором. Она отличается от системы Г-Д в чистом виде тем, что генератор, помимо независимой обмотки возбуждения L1G1, снабжен еще одной обмоткой возбуждения – противоком-
паундной обмоткой L2G1, включенной последовательно в цепь якоря G1 и выполняющей функции жесткой обратной связи по току ( на рис. 9.3 место включения обмотки L2G1 по
казана при помощи стрелок, т.е. последовательно в цепь главного тока ).
Ее намагничивающая сила F направлена встречно намагничивающей силе F об-
мотки независимого возбуждения L1G1, т. е. она действует на генератор размагничиваю-
ще.
Общий магнитный поток возбуждения генератора создается разностью намагничи-
вающих сил обеих обмоток.
При нормальной нагрузке намагничивающая сила обмотки L1G1 значительно боль
ше, чем обмотки L2G1, и генератор развивает ЭДС, как в обычной системе Г-Д.
При перегрузке разность намагничивающих сил обмоток уменьшается, магнитный поток и ЭДС генератора снижаются, напряжение, подведенное к ЭД, падает, и угловая скорость ЭД становится меньше.
При остановке якоря исполнительного двигателя М2 ЭДС генератора G1 настолько уменьшается, что ток стоянки оказывается в пределах кратковременно допустимого, обыч
но равного ( 2,2…2,5) I .
Система Г-Д обладает исключительно хорошими регулировочными свойствами и позволяет регулировать скорость в пределах 1 : 30. Регулирование получается плавным, так как из-за сравнительно небольших токов возбуждения можно сделать регулировочные резисторы с большим количеством ступеней.
Систему Г – Д применяют в электроприводах мощностью более 75…80 кВт – тя-
желовесных лебедках и кранах, брашпилях, а также на судах с ГЭУ для привода гребного винта.
Существенный недостаток системы Г - Д – большое количество установленных эле
ктрических машин.
Развитие полупроводниковой техники позволило перейти от рассмотренной систе-
мы Г – Д к т.н. системам «управляемый вентильный преобразователь – двигатель», или, сокращенно, системам УВП – Д ( рис. 9.5 ).