

8.13. Каскады с однозонным регулированием скорости
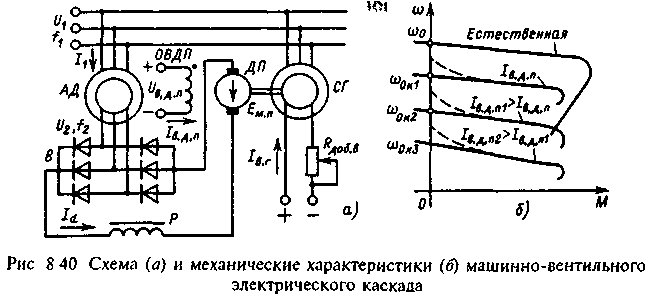
Рассмотрим особенности перечисленных упрощенных каскадных схем, которые в связи с развитием полупроводниковой техники получили широкое распространение. Схема электрического машинно-вентильного каскада представлена на рис.8.40,а. Здесь в цепь ротора включен мостовой полупроводниковый выпрямитель В, к выводам которого через сглаживающий реактор Р подключен якорь двигателя постоянного тока ДП. Этот двигатель приводит во вращение синхронный генератор СГ, ток возбуждения которого можно регулировать вручную с помощью реостата Rдобв. В более общем случае регулирование тока возбуждения может быть автоматическим и осуществляться с помощью предусмотренного для этой цели тиристорного возбудителя.
Наличие неуправляемого выпрямителя в цепи ротора существенно изменяет свойства каскада по сравнению с рассмотренным каскадом с режимом МДП. Здесь частота и напряжение роторной цепи определяются скоростью ротора двигателя, его скольжением, поэтому синхронный режим работы исключен - каскад всегда работает в асинхронном режиме. Односторонняя проводимость цепи якоря ДП, обусловленная наличием вентилей, исключает возможность изменения направления потока энергии скольжения - машина ДП работает двигателем, СГ - генератором, т. е. поток энергии скольжения всегда направлен от ротора двигателя в сеть.
Выпрямитель В работает на противоЭДС двигателя ДП, которой можно задавать любые значения в диапазоне 0-Ед.п.ном, изменяя напряжение Uвдп и ток возбуждения Iвдп машины ДП. Следовательно, управление потоком мощности скольжения здесь осуществляется в цепи выпрямленного тока. При этом, как было отмечено в §7.2, для получения механической характеристики каскада целесообразно использовать схему замещения, приведенную к цепи выпрямленного тока.
Для рассматриваемого каскада такая схема представлена на рис.8.41. С ее помощью можно записать уравнение электрического равновесия:

где Eдп- ЭДС двигателя постоянного тока ДП; Ed0 - среднее значение выпрямленного напряжения при s=1 и Id=0; Uв и Uщ - падение напряжения на одном вентиле и одной щетке на якоре двигателя ДП при протекании выпрямленного тока Id; хдв=х'1+х2 - реактивное сопротивление рассеяния ДД, приведенное ко вторичной цепи; R'1 - активное сопротивление статорной обмотки АД, приведенное к цепи ротора; R2 - сопротивление фазы ротора АД; mxдвs/2 - сопротивление, учитывающее падение напряжения, обусловленное процессами коммутации токов.
На схеме оно условно изображено в виде реактивного сопротивления, так как не связано с поглощением энергии. Из (8.121) определим выпрямленный ток ротора:
![]()
где
![]() - суммарная противоЭДС в цепи постоянного
тока с учетом падения напряжения на
вентилях и щетках якоря двигателя;
- суммарная противоЭДС в цепи постоянного
тока с учетом падения напряжения на
вентилях и щетках якоря двигателя;
![]() ;
Rp
- сопротивление реактора Р.
;
Rp
- сопротивление реактора Р.
Уравнение (8.122) показывает, что при E0 ток роторной цепи становится равным нулю при конечном значении s=s0, соответствующем режиму идеального холостого хода привода:
![]()
Следовательно, воздействием на цепь возбуждения ДП можно изменять скорость идеального холостого хода на искусственной характеристике:

И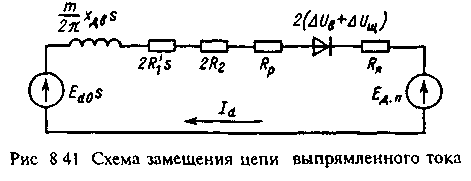 з
данного выражения следует, что при
увеличении тока возбуждения Iвдп
поток Фдп
и ЭДС Едп
возрастают, что влечет за собой снижение
скорости идеального холостого хода
привода. При Фдп=0
0и<0
из-за падения напряжения на вентилях и
щетках, которое нелинейно зависит от
тока и принимается здесь примерно
постоянным. Получить в каскаде скорость
идеального холостого хода, близкую со0,
можно путем изменения знака ЭДС Едп
и направления тока возбуждения Iвдп.
При Eдп=-2(UВ+Uщ)
получим 0и=0
При этом следует иметь в виду, что при
изменении знака ЭДС Eдп
и выполнении неравенства |Едп|>2·(Uв+Uщ)
якорная цепь оказывается замкнутой
вентилями В накоротко и ток якоря может
быстро возрастать до опасных значений.
з
данного выражения следует, что при
увеличении тока возбуждения Iвдп
поток Фдп
и ЭДС Едп
возрастают, что влечет за собой снижение
скорости идеального холостого хода
привода. При Фдп=0
0и<0
из-за падения напряжения на вентилях и
щетках, которое нелинейно зависит от
тока и принимается здесь примерно
постоянным. Получить в каскаде скорость
идеального холостого хода, близкую со0,
можно путем изменения знака ЭДС Едп
и направления тока возбуждения Iвдп.
При Eдп=-2(UВ+Uщ)
получим 0и=0
При этом следует иметь в виду, что при
изменении знака ЭДС Eдп
и выполнении неравенства |Едп|>2·(Uв+Uщ)
якорная цепь оказывается замкнутой
вентилями В накоротко и ток якоря может
быстро возрастать до опасных значений.
Электромагнитный момент двигателя можно определить по электромагнитной мощности Рэ, передаваемой роторной цепи.
![]()
Здесь учтено, что падение напряжения, обусловленное коммутацией, имеет реактивный характер и не связано с потреблением энергии. Выражение (8.122) с учетом (8.123) можно представить в виде
![]()
Подставив (8.126) в (8.125), получим
![]()
В результате преобразований (8.127) можно представить в виде
![]()
![]()
Полученные уравнения механической характеристики электрического машинно-вентильного каскада справедливы для значения непрерывного тока Id, при котором угол коммутации токов в выпрямителе не превосходит 120°. Практически это соответствует рабочему участку характеристики в пределах от М=0 до М=0,8Мке, где Мке - критический момент асинхронного двигателя на естественной механической характеристике. Выразив в (8.128) скольжения через скорости и приняв приближенно RэRэ0, уравнение механической характеристики можно записать в линеаризованном виде:
![]()
где
![]() - модуль жесткости статической механической
характеристики каскада.
- модуль жесткости статической механической
характеристики каскада.
Так как Rэ0 по мере снижения скорости увеличивается, жесткость статических характеристик каскада уменьшается с возрастанием Iвд и s0. Примерный вид механических характеристик в рассматриваемой схеме показан на рис.8.40,б. При малых нагрузках возможен переход в режим прерывистых токов, при котором механические характеристики отклоняются от (8.128), как показано на рис.8.40,б штриховыми линиями.
При независимой вентиляции в качестве критерия допустимой нагрузки могут быть приняты номинальные значения токов статора и ротора I1ном и I2ном, при этом поток двигателя Ф=Фном и cos ф2=cos 2ном. Соответственно допустимая нагрузка каскада
Mдоп=kФномI2ном·cos(f2ном)=Mном=const
Электрическим каскадам соответствует регулирование при постоянном моменте. Как было отмечено, мощность преобразователя энергии скольжения в электрических каскадах пропорциональна максимальному скольжению двигателя при регулировании скорости. В рассматриваемом каскаде осуществляется однозонное регулирование и требуемая мощность преобразователя определяется соотношением
![]()
г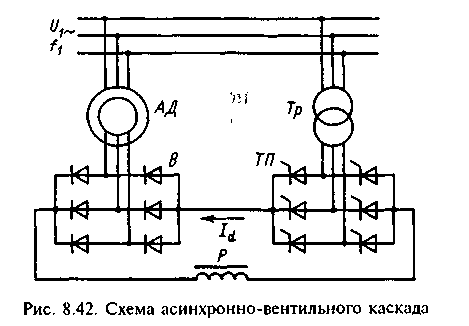 де
=max/min0/min
- Диапазон регулирования скорости.
Электромашинный преобразовательный
агрегат и выпрямитель должны иметь
номинальную мощность, определяемую
(8.130). Невысокий КПД электромашинного
преобразовательного агрегата несколько
снижает энергетические показатели
машинно-вентильного каскада. Угол
коммутации выпрямителя вызывает
дополнительный сдвиг по фазе между
током ротора и напряжением сети, что
увеличивает потребление реактивной
мощности. Однако его важным преимуществом
является возможность работы синхронного
генератора с опережающим cos
ф при соответствующем регулировании
его тока возбуждения Iвг.
Эта возможность представляет особый
интерес в мощных электроприводах, так
как мощный синхронный генератор каскада
может благотворно влиять на условия
работы питающей сети, компенсируя
отрицательное влияние на сеть широко
используемых в последние годы на
предприятиях тиристорных преобразователей.
Напротив, в электроприводах средней и
малой мощности более целесообразно
использование вентильных электрических
каскадов. Схема асинхронно-вентильного
каскада представлена на рис.8.42. В ней
вместо электромашинного преобразовательного
агрегата предусмотрен нереверсивный
тиристорный преобразователь ТП,
работающий в инверторном режиме, причем
для согласования напряжения сети и
напряжения цепи ротора предусмотрен
трансформатор Тр. Выпрямленный ток в
данной схеме определяется по формуле
де
=max/min0/min
- Диапазон регулирования скорости.
Электромашинный преобразовательный
агрегат и выпрямитель должны иметь
номинальную мощность, определяемую
(8.130). Невысокий КПД электромашинного
преобразовательного агрегата несколько
снижает энергетические показатели
машинно-вентильного каскада. Угол
коммутации выпрямителя вызывает
дополнительный сдвиг по фазе между
током ротора и напряжением сети, что
увеличивает потребление реактивной
мощности. Однако его важным преимуществом
является возможность работы синхронного
генератора с опережающим cos
ф при соответствующем регулировании
его тока возбуждения Iвг.
Эта возможность представляет особый
интерес в мощных электроприводах, так
как мощный синхронный генератор каскада
может благотворно влиять на условия
работы питающей сети, компенсируя
отрицательное влияние на сеть широко
используемых в последние годы на
предприятиях тиристорных преобразователей.
Напротив, в электроприводах средней и
малой мощности более целесообразно
использование вентильных электрических
каскадов. Схема асинхронно-вентильного
каскада представлена на рис.8.42. В ней
вместо электромашинного преобразовательного
агрегата предусмотрен нереверсивный
тиристорный преобразователь ТП,
работающий в инверторном режиме, причем
для согласования напряжения сети и
напряжения цепи ротора предусмотрен
трансформатор Тр. Выпрямленный ток в
данной схеме определяется по формуле
![]()
где Еmax - максимальная ЭДС тиристорного преобразователя; - угол регулирования.
При работе каскада угол регулирования задается в пределах от 90 до 150°. При таких углах в режиме непрерывного тока преобразователь работает в инверторном режиме и его ЭДС в (8.131) отрицательна. Эквивалентное сопротивление при этом выражается так:
![]()
где mв, mи - число фаз выпрямления соответственно выпрямителя и инвертора; хтр, Rтр - индуктивное сопротивление рассеяния и активное сопротивление трансформатора.
Сравнивая (8.131) и (8.132) с (8.122), можно убедиться в их полной аналогии, поэтому механические характеристики асинхронно-вентильного каскада описываются соотношениями (8.127)-(8.129) и имеют вид, аналогичный характеристикам машинно-вентильного каскада (см. рис.8.40,б). Вентильный каскад успешно применяется в электроприводах небольшой мощности, при этом Rэ относительно возрастает и уменьшение жесткости механических характеристик при уменьшении скорости 0и проявляется более заметно, чем показано на рис.8.40,б. Поэтому для получения требуемой точности регулирования используют автоматическое регулирование скорости каскада по отклонению, подавая сигнал ошибки на вход тиристор-ного преобразователя. Благодаря высокому коэффициенту усиления и быстродействию тиристорного преобразователя в схеме обеспечиваются благоприятные условия регулирования.
Коэффициент полезного действия вентильного каскада выше, чем машинно-вентильного из-за малых потерь энергии в тиристорном преобразователе. В то же время коэффициент мощности электропривода дополнительно снижается сдвигом по фазе между током инвертора и напряжением сети и искажением формы тока.
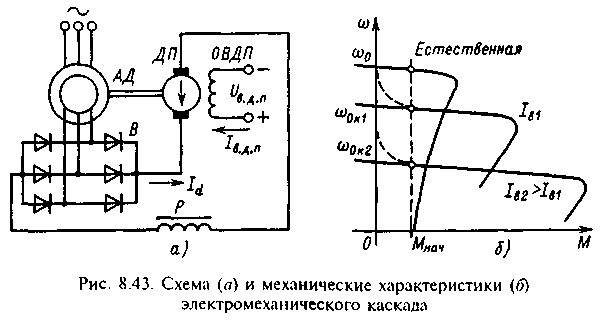
В заключение рассмотрим особенности машинно-вентильного электромеханического каскада, схема которого приведена на рис.8.43,а. Сравнивая эту схему со схемой на рис.8.40,а, можно установить, что для электромеханического каскада применима схема замещения, приведенная на рис.8.41. Соответственно формулы (8.121), (8.122) и (8.128), полученные для машинно-вентильного каскада, справедливы и для электромеханического каскада. Особенностью последнего является то, что энергия скольжения направляется не в сеть, а в виде механической энергии, вырабатываемой двигателем ДП, на вал агрегата АД-ДП. Следовательно, электромагнитный момент, развиваемый каскадом, определяется суммой моментов этих машин:
![]()
Электромагнитный момент асинхронного двигателя при этом определяется формулой (8.125). Электромагнитный момент двигателя постоянного тока
![]()
Электродвижущая сила двигателя ДП
![]()
Если данное выражение Eдп подставить в (8.122) и приближенно принять Uв=Uщ=0, получим
![]()
Из (8.135) при Id=0 можно определить скольжение, соответствующее скорости идеального холостого хода каскада:
![]()
С учетом (8.136) выражение (8.135) может быть представлено в виде
![]()
Суммируя (8.125) и (8.133) в соответствии с (8.132), получаем
![]()
Уравнение механической характеристики электромеханического каскада получается, если в (8.138) подставить (8.137):

Уравнение (8.139) определяет нелинейные механические характеристики, вид которых представлен на рис.8.43,б. Если приближенно принять Rэ= Rэ0=const при данном s0, то уравнение (8.139) можно линеаризовать в пределах рабочего участка механических характеристик:
![]()
где![]() -
модуль жесткости искусственной
механической характеристики
электромеханического каскада.
-
модуль жесткости искусственной
механической характеристики
электромеханического каскада.
Как и в схеме электрического каскада, увеличение тока возбуждения машины ДП приводит к увеличению скольжения s0 и уменьшению скорости идеального холостого хода каскада 0и. Однако с возрастанием нагрузки растет ток Id и момент каскада увеличивается как из-за роста момента Мад, так и из-за увеличения момента двигателя постоянного тока Мдп. Поэтому модуль жесткости и при снижении скорости в электромеханическом каскаде может возрастать, если увеличение ЭДС Eдп вызовет более существенный рост числителя в выражении и (8.140), чем рост Rэ0, обусловленный увеличением скольжения. При малых нагрузках и здесь возможен режим прерывистых токов, влияние которого на форму характеристик показано на рис.8.43,б штриховыми линиями.
Оценим допустимую нагрузку при регулировании скорости в электромеханическом каскаде. Примем, что двигатель имеет независимую вентиляцию. Если пренебречь потерями, допустимую мощность нагрузки каскада можно представить в виде
![]()
![]()
Таким образом, электромеханический каскад обеспечивает регулирование скорости при постоянной мощности Допустимый момент нагрузки каскада
![]()
изменяется обратно пропорционально скорости, возрастая при ее снижении вследствие увеличения момента, развиваемого двигателем постоянного тока ДП Максимальный момент ДП развивает при минимальной скорости
![]()
![]()
где![]()
Известно, что габариты электрической машины определяются ее номинальным моментом Соотношение (8 141) показывает, что требуемый момент двигателя постоянного тока в электромеханическом каскаде быстро возрастает при увеличении диапазона регулирования скорости и при D>2 превышает номинальный момент асинхронного двигателя. Пусть требуемый диапазон регулирования D=10 В соответствии с (8 141) при этом потребуется двигатель с номинальным моментом, большим, чем у асинхронного двигателя, примерно в 9 раз
Если отказаться от регулирования при Р=const и регулировать скорость при М=Мад.ном=const, можно существенно снизить требования к номинальному моменту двигателя постоянного тока При такой нагрузке и минимальной скорости электромагнитная мощность Рэ=Рэmin=Мадномmin. Эта мощность создается на валу каскада моментом асинхронного двигателя Мад=Мадmin и моментом двигателя постоянного тока Mдп=Mдпmax=Mдпном
![]()
С![]() ледовательно,
при регулировании с М=const
ледовательно,
при регулировании с М=const
Номинальный момент машины постоянного тока при этом
![]()
и при D=10 составит 0,9Мадном. При номинальной скорости, равной номинальной скорости асинхронного двигателя, требуемая мощность ДП определится аналогично определению мощности электрического каскада по соотношению (8.130).
Однако условия работы электромеханического каскада накладывают другие ограничения, которые затрудняют реализацию регулирования скорости в этом каскаде при D>23. Так, в рассмотренном примере при D=10 при работе с минимальной скоростью min без нагрузки ЭДС двигателя ДП должна полностью уравновешивать выпрямленное напряжение Ed0smax=0,9Ed0. Для двигателей единой серии это напряжение составит в среднем 300 В и ЭДС двигателя ДП
![]()
Необходимо выбрать серийный двигатель постоянного тока, для которого максимально допустимая скорость дпдоп=0, а
ЭДС Eд.пmах=300 В ПРИ min=0.10. ПреДПОЛОЖИМ, ЧТО ДПдоп=дпном=10min, тогда номинальное напряжение ДП должно быть не менее 3000 В. Большинство серийных двигателей имеет Uном440 В, и на напряжение выше 1000 В машины постоянного тока не выпускаются. Несколько облегчает задачу то, что максимально допустимая скорость для двигателей постоянного тока указывается чаще всего для режима ослабления поля и превышает номинальную в 1,5-2 раза. Но и с учетом этого можно заключить, что на серийных машинах реализовать электромеханический каскад с D>23 практически невозможно.
Специфика электромеханического каскада требует при его выборе строгого обоснования путем сравнения с электроприводом постоянного тока. Следует иметь в виду, что при D>2 габаритная мощность ДП достаточна для приведения в движение механизма без асинхронного двигателя. При этом ослабление поля двигателя позволяет осуществлять экономичное регулирование скорости при D=1,52, а при использовании двигателей специальной серии, рассчитанных на глубокое ослабление поля, D8, что превышает возможности электромеханического каскада.