

8.11. Принцип ориентирования по полю двигателя при частотном управлении
Координатные и фазные преобразования переменных, рассмотренные в гл. 2, в настоящее время не только используются для упрощения анализа динамических процессов электромеханического преобразования энергии, но и успешно применяются в качестве математической основы построения алгоритмов функционирования систем управления электроприводами переменного тока. В частности, этот математический аппарат является основой принципа ориентирования по полю двигателя, который реализован в ряде совершенных систем частотного управления асинхронными и синхронными электроприводами.
Для пояснения этого принципа предположим, что при управлении двигателем доступны для измерения текущие значения модуля, угловой скорости и фазы вектора потокосцепления ротора. Тогда ось х синхронно вращающейся системы координат х, у представляется возможным совместить с мгновенным направлением этого вектора:
![]()
при этом 2x=2max, 2y=0 вектор тока статора становится ориентированным относительно углом сдвига 1:
![]()
его проекция на ось х i1x является мгновенным значением намагничивающего тока машины, а проекция на ось у, как было показано в §6.5 для статического режима, представляет собой активный ток статора. Основой для вычисления текущих переменных служат уравнения механической характеристики в осях х, у (k=0эл), ориентированных по полю двигателя, в которых 2x=2max, 2y=0 в любой момент времени:
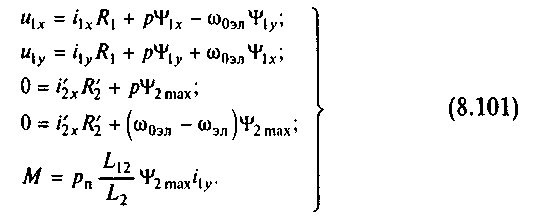
С помощью уравнений потокосцеплений при ориентировании по вектору систему уравнений (8.101) можно преобразовать к виду
где
![]() Аналогичным путем можно осуществить
ориентирование повектору потокосцепления
Аналогичным путем можно осуществить
ориентирование повектору потокосцепления
![]() или
или
![]() и получить соотношения, соответствующие
этим условиям.
и получить соотношения, соответствующие
этим условиям.
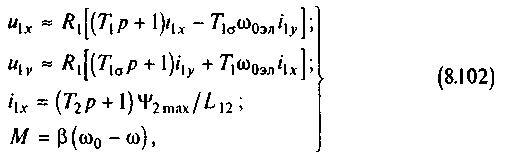
Полученные уравнения наглядно представляют динамические особенности асинхронного электропривода с частотным управлением при ориентировании по полю двигателя. Изменением i1х можно регулировать потокосцепление ротора, но при существенных проявлениях электромагнитной инерции, характеризуемой большими постоянными времени Т1 и Т2 При постоянном потоке (2max=const) система (8.102) представляется в виде
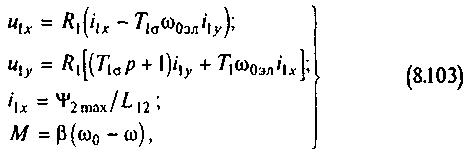
при этом электромагнитная инерция обусловлена только изменениями потоков рассеяния статора (малая постоянная времени T1) и полностью проявляется только при питании статора от источника напряжения. Если преобразователь частоты обладает свойствами источника тока, при 2max=const теоретически асинхронный двигатель представляет собой безынерционный объект управления, а при регулировании потока по отклонению его механическая характеристика определяется уравнениями

Отсюда следует, что, если при управлении асинхронным двигателем оперировать в цепях управления не с реальными переменными машины, а с преобразованными к координатным осям, ориентированным по полю, можно отдельно управлять магнитным потоком и моментом двигателя, имея дело не с переменными синусоидальными величинами, а с постоянными их преобразованными значениями. Это позволяет строить систему управления асинхронным двигателем аналогично системе управления двигателем постоянного тока. Основой построения таких систем является информация о мгновенном значении и пространственном положении вектора потокосцепления в воздушном зазоре, непосредственное измерение которого обычно осуществляется с помощью датчиков Холла.
В соответствии с изложенным для реализации управления потоком и моментом двигателя по отклонению необходимо измерить мгновенные реальные трехфазные токи статора и поток в воздушном зазоре, осуществить преобразование трехфазных переменных к эквивалентным двухфазным и произвести координатное преобразование их к осям, ориентированным по полю. Определенные таким образом преобразованные текущие значения i1x и i1y остается сравнить с их заданными значениями, получить сигналы управления потоком и моментом в осях х, у, а затем осуществить обратные координатное и двухфазно-трехфазное преобразования и получить действительные сигналы для управления трехфазным преобразователем частоты. Для осуществления этой цепочки операций необходимо управляющее вычислительное устройство, некоторые особенности которого можно установить, рассматривая схему, приведенную на рис.8.37,a.
Система управления состоит из трех крупных блоков: блока вычисления текущих значений переменных БВТП, блока регуляторов переменных БРП и блока вычисления заданных значений переменных - управляющих воздействий БВЗП. Рассмотрим назначение, основные элементы и особенности измерительного блока БВТП.
Для того чтобы вычислить амплитуду и фазу переменной трехфазного двигателя, достаточно измерить мгновенные значения этой переменной в двух фазах двигателя. Блок БВТП преобразует измеренные с помощью датчиков Холла трехфазные мгновенные значения потока в воздушном зазоре a и b и измеренные с помощью датчиков тока действительные трехфазные переменные токи i1a и i1b в ориентированные по полю значения потокосцепления ротора 2mах намагничивающего тока i1х и активного тока i1y. Он состоит из блоков фазных преобразований БФП1 и БФП2, блока векторного фильтра БВФ и блока координатного преобразования БКП2 Блок БФП1 осуществляет трехфазно-двухфазное преобразование потокосцепления в воздушном зазоре в соответствии с формулами (2.34).
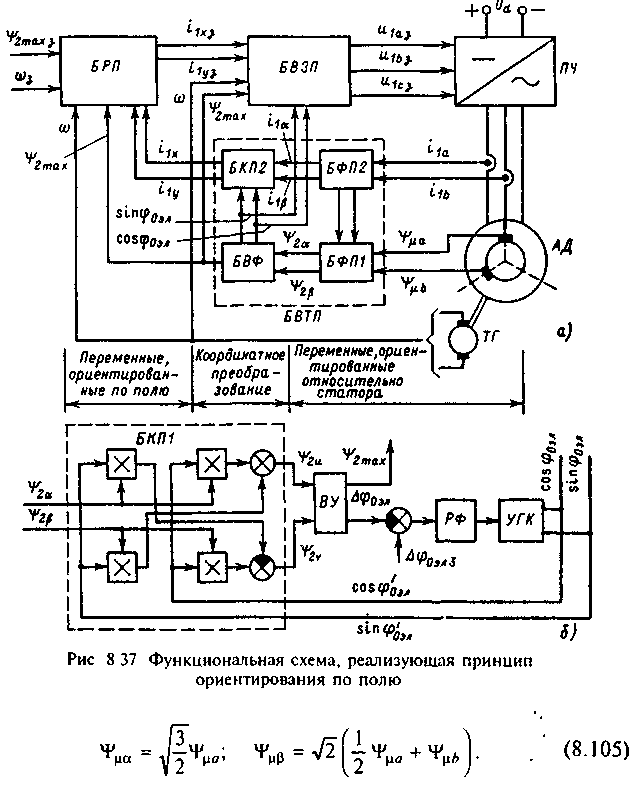
Кроме того, блок БФП1 вычисляет необходимое для^онтроля потокосцепление ротора в соответствии с формулами
Необходимые для решения (8.106) значения i1 и i1 вычисляются блоком БФП2 по формулам, аналогичным (8.105). Так как переменные 2 и 2 вычислены с помощью (8.106) через переменные статора, они представляют собой синусоидальные величины, изменяющиеся с частотой 0эл.
Блок
векторного фильтра БВФ решает задачу
определения мгновенного пространственного
угла поворота 0эл
вектора потокосцепления ротора
![]() .
Решение этой задачи осложняется наличием
зубцовых пульсаций потока машины,
уменьшение влияния которых обеспечивается
активным векторным фильтром (рис.8.37,б).
Его составной частью является блок
координатного преобразования БКП1, на
два входа которого подаются текущие
значения 2
и 2,
а к двум другим входам подводятся функции
sin
ф'0эл
и cos
ф'0эл,
вырабатываемые управляемым генератором
колебаний УГК. В общем случае ф'0элф0эл,
поэтому блок БКП1 осуществляет координатное
преобразование а, bu,
v
в соответствии с (2.15):
.
Решение этой задачи осложняется наличием
зубцовых пульсаций потока машины,
уменьшение влияния которых обеспечивается
активным векторным фильтром (рис.8.37,б).
Его составной частью является блок
координатного преобразования БКП1, на
два входа которого подаются текущие
значения 2
и 2,
а к двум другим входам подводятся функции
sin
ф'0эл
и cos
ф'0эл,
вырабатываемые управляемым генератором
колебаний УГК. В общем случае ф'0элф0эл,
поэтому блок БКП1 осуществляет координатное
преобразование а, bu,
v
в соответствии с (2.15):

Так как 2=2max·cos оэл и 2=2max·sin ф0эл, то, подставив эти выражения в (8.107), после преобразований получим
![]()
Нетрудно видеть, что на выходе блока БКП1 получаются составляющие вектора в виде периодических функций разности между действительным углом поворота ф0эл и выдаваемым генератором колебаний УГК ф'0эл. Предусмотренное в схеме вычислительное устройство ВУ выделяет модуль 2max и определяет угол 0эл=оэл-'оэл. Сигнал отрицательной связи по углу подается на вход ПИ-регулятора фазы РФ, выходная величина которого воздействует на УГК в направлении уменьшения 0ЭЛ.
При отсутствии в кривой потока высших гармоник в установившемся режиме благодаря интегральной составляющей регулятора РФ достигалось бы полное устранение ошибки ф0эл=0. При этом '0эл=0эл и в соответствии с (8.108) 2u=2max, a 2v=0. Таким образом, составляющая 2v непосредственно связана со знаком ошибки 0ЭЛ и ее значением. С помощью задающего сигнала ф0элз устанавливается минимальное значение ошибки, обусловленной гармониками потока.
Полученные на выходе БВФ функции cos ф0эл и sin ф0эл используются для координатного преобразования токов i1 и i1, которое осуществляется блоком БКП2. Этот блок не имеет отличий от блока БКП1 (рис.8.37,б); на его выходе получаются составляющие тока статора i1х и i1y, постоянные по значению (для статического режима). Эти значения, а также текущие значения потокосцепления 2mах и скорости поступают в блок регуляторов переменных БРП и используются для регулирования по отклонению от заданных значений.
Поступающие на вход блока регуляторов БРП задающие сигналы 2maxз и 3, совместно с ориентированными по полю текущими значениями переменных используются для вычисления заданных значений переменных i1хз и i1yз, с помощью которых блок вычисления задающих сигналов БВЗП формирует синусоидальные напряжения управления преобразователем u1aз, u16з и u1сз.
Здесь для пояснения принципа ориентирования по полю подробно рассмотрен блок вычисления текущих переменных БВТП системы «Трансвектор», разработанной фирмой «Сименс» (ФРГ) для управления асинхронными и синхронными электроприводами с частотным управлением. Описание других блоков этой системы приведено в [4].