

8.4. Схемы шунтирования якоря двигателя постоянного тока с последовательным возбуждением
Для маломощных двигателей с последовательным возбуждением применима потенциометрическая схема регулирования напряжения, приложенного к силовой цепи двигателя, аналогичная рассмотренной на рис.8.4,а. Механические характеристики в этой схеме подобны характеристикам двигателя с последовательным возбуждением при различных напряжениях, но с увеличенным и изменяющимся от характеристики к характеристике суммарным сопротивлением якорной цепи.
Более благоприятная форма регулировочных механических характеристик получается в схеме шунтирования якоря, представленной на рис.8.6,а. В этой схеме сопротивление шунтирует только обмотку якоря двигателя, а обмотка возбуждения включается последовательно в цепь добавочного сопротивления Rдоб.
Как следствие, по сравнению с потенциометрической схемой здесь кроме снижения подведенного к цепи якоря двигателя напряжения достигается также эффект увеличения тока возбуждения за счет тока, протекающего по Rш. Благодаря последнему ток возбуждения при идеальном холостом ходе Iя=0 не равен нулю:
г![]()
![]() де
де
а![]() скорость идеального холостого хода
имеет ограниченное значение:
скорость идеального холостого хода
имеет ограниченное значение:
При >0ш двигатель переходит в генераторный режим, в котором поступающая с вала механическая энергия преобразуется в электрическую и теряется в виде теплоты в сопротивлениях Rя и Rш. Двигатель работает генератором параллельно с сетью на сопротивление Rш, и увеличение напряжения на Rш по мере роста скорости двигателя вызывает постепенное уменьшение потребляемого из сети тока, т. е. тока возбуждения. При IшRшUс Iв0, а скорость двигателя неограниченно возрастает. Поэтому в области генераторного режима электромеханическая характеристика по мере роста скорости асимптотически приближается к прямой: Iя=IK2=-Uc/Rш Так как при этом поток стремится к нулю, момент двигателя в генераторном режиме вначале возрастает, достигает максимума и в дальнейшем при М=kФIЯ0, т.е. механическая характеристика асимптотически приближается к оси ординат слева.
Э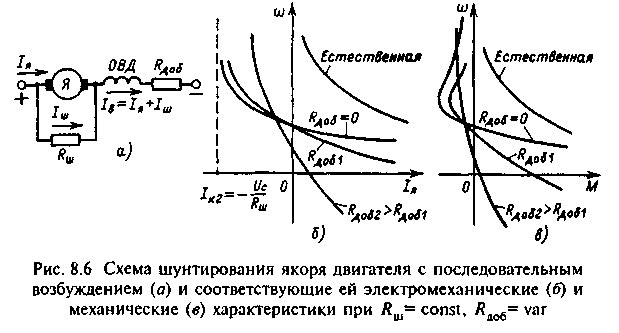 лектромеханические
и механические характеристики в схеме
шунтирования якоря двигателя с
последовательным возбуждением на
рис.8.6,б и в приведены для случая, когда
Rш=const,
Rдоб=var.
Благодаря ограниченной скорости
идеального холостого хода эти
характеристики создают более благоприятные
условия для регулирования скорости,
чем характеристики в потенциометрической
схеме.
лектромеханические
и механические характеристики в схеме
шунтирования якоря двигателя с
последовательным возбуждением на
рис.8.6,б и в приведены для случая, когда
Rш=const,
Rдоб=var.
Благодаря ограниченной скорости
идеального холостого хода эти
характеристики создают более благоприятные
условия для регулирования скорости,
чем характеристики в потенциометрической
схеме.
Регулирование Rш при Rдo6=const дает семейство характеристик, приведенное на рис.8.7,а и б. Аналогично потенциометри-ческой схеме все эти характеристики пересекаются в одной точке, соответствующей IK1 (Мк1) и к1, в которой падение напряжения в якоре уравновешивается его ЭДС. Эта точка определяется пересечением реостатной характеристики, соответствующей Rдоб при Rш=, и характеристики динамического торможения с независимым возбуждением при Rш=0 и Ф=Ф1=const, где Ф1=f(Iв1)=f(Uc/(Rв+Rдоб)).
В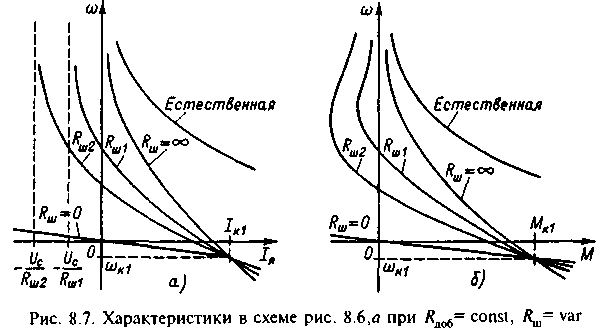 схеме шунтирования якоря (см. рис.8.6,а)
при определении допустимой нагрузки
на регулировочных характеристиках
необходимо учитывать, что в двигательном
режиме Iв>Iя.
Это вынуждает в качестве критерия
допустимой нагрузки при постоянной
теплоотдаче принимать номинальный ток
обмотки возбуждения Iдоп=Iв.ном=Iном,
что обеспечивает регулирование при
потоке, равном номинальному, но требует
по мере снижения скорости уменьшения
момента Мдоп<Мном
таким образом, чтобы выполнялось условие
Iядоп=Iном-Iш.
схеме шунтирования якоря (см. рис.8.6,а)
при определении допустимой нагрузки
на регулировочных характеристиках
необходимо учитывать, что в двигательном
режиме Iв>Iя.
Это вынуждает в качестве критерия
допустимой нагрузки при постоянной
теплоотдаче принимать номинальный ток
обмотки возбуждения Iдоп=Iв.ном=Iном,
что обеспечивает регулирование при
потоке, равном номинальному, но требует
по мере снижения скорости уменьшения
момента Мдоп<Мном
таким образом, чтобы выполнялось условие
Iядоп=Iном-Iш.
В заключение отметим, что использование для регулирования напряжения резисторов является весьма простым и дешевым техническим решением, однако следует иметь в виду, что этот способ регулирования сопровождается значительными потерями в сопротивлениях Rш и Rдоб. Эти потери возрастают с уменьшением внутреннего сопротивления потенциометра и соответствующим увеличением получаемой жесткости характеристик. Поэтому по потерям энергии при регулировании потенциометрические схемы еще менее экономичны, чем реостатное регулирование.