

7.8. Влияние отрицательной связи по моменту (току) на динамику упругой электромеханической системы
Структурная схема упругой электромеханической системы, замкнутой отрицательной обратной связью по моменту (или току) двигателя, приведена на рис.7.22,а. В результате структурных преобразований эту схему можно привести к виду, представленному на рис.7.22,б. Сравнивая преобразованную схему со структурной схемой обобщенной разомкнутой упругой электромеханической системы на рис.6.15,а, можно установить, что введение обратной связи по моменту видоизменяет передаточную функцию динамической жесткости механической характеристики При данной механической части динамика упругой электромеханической системы полностью определяется частотными характеристиками динамической жесткости, а изменения, вносимые обратной связью по моменту, выявляются путем анализа изменений в указанных характеристиках.
В гл.4 было установлено, что электропривод с линейной механической характеристикой при определенных сочетаниях параметров оказывает на возникающие в механической части упругие колебания сильное демпфирующее действие. Был выполнен анализ этого влияния для системы, имеющей передаточную функцию динамической жесткости
![]()
и установлены оптимальные сочетания параметров, обеспечивающие минимум колебательности электромеханической системы. Передаточная функция динамической жесткости в системе, замкнутой отрицательной связью по моменту, определяется выражением (7.28):

Изменения, вносимые обратной связью по моменту, при Тп0 наглядно показаны на рис.7.11,а, а при Тп>>ТЭ - на рис.7.11,б.
При безынерционном преобразователе (Tп=0) отрицательная обратная связь по моменту эквивалентна введению дополнительных сопротивлений в силовую цепь двигателя. Если в разомкнутой системе жесткость естественной механической характеристики е была выше оптимальной по критерию минимума колебательности, путем введения отрицательной связи по моменту или току можно увеличить демпфирование колебаний. Если, напротив, жесткость е ниже оптимальной, отрицательная связь по моменту может только ухудшать демпфирование.
Н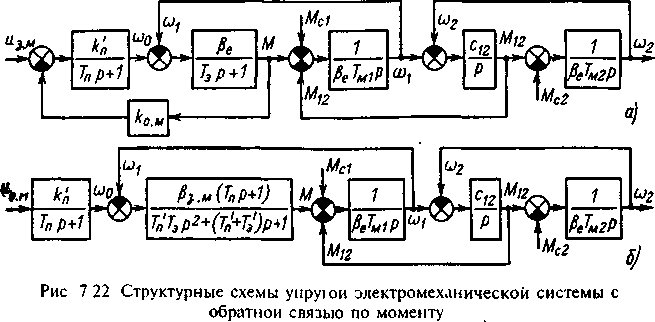 а
практике обратная связь по моменту
(току) вводится для регулирования момента
или тока с определенной точностью,
поэтому при Тп0
она всегда оказывается настолько
сильной, что исключает демпфирование
колебаний электроприводом. Во всех
подобных случаях она отрицательно
сказывается на колебательности процессов
в механической части электропривода.
При преобразователе, обладающем большой
электромагнитной инерцией (ТП>>ТЭ),
при определенных сочетаниях параметров
высокое демпфирование сохраняется даже
при абсолютно мягкой статической
механической характеристике В этом
можно убедиться, рассматривая рис.7.11,б:
малая жесткость зм
сохраняется только при весьма низких
частотах: <1/Tп.
В области средних частот инерционность
преобразователя является фильтром и
обратная связь по моменту проявляется
слабо (зме).
Если /T'п121/Tэ
и в разомкнутой системе имела место
минимальная колебательность, то она
может не измениться существенно и в
системе, замкнутой по моменту или току.
а
практике обратная связь по моменту
(току) вводится для регулирования момента
или тока с определенной точностью,
поэтому при Тп0
она всегда оказывается настолько
сильной, что исключает демпфирование
колебаний электроприводом. Во всех
подобных случаях она отрицательно
сказывается на колебательности процессов
в механической части электропривода.
При преобразователе, обладающем большой
электромагнитной инерцией (ТП>>ТЭ),
при определенных сочетаниях параметров
высокое демпфирование сохраняется даже
при абсолютно мягкой статической
механической характеристике В этом
можно убедиться, рассматривая рис.7.11,б:
малая жесткость зм
сохраняется только при весьма низких
частотах: <1/Tп.
В области средних частот инерционность
преобразователя является фильтром и
обратная связь по моменту проявляется
слабо (зме).
Если /T'п121/Tэ
и в разомкнутой системе имела место
минимальная колебательность, то она
может не измениться существенно и в
системе, замкнутой по моменту или току.
Значение Tп' зависит от коэффициента отрицательной связи по моменту (току), поэтому наиболее благоприятные условия для сохранения демпфирующей способности при регулировании момента обеспечиваются в комбинированной системе регулирования с формирующей положительной связью по скорости. Введение критической положительной связи по скорости позволяет обеспечить высокую статическую точность регулирования, а коэффициент отрицательной связи по моменту или току может быть выбран таким, чтобы на частоте резонанса 12 динамическая жесткость была близка к естественной e.
Рассмотренные условия характерны для мощных электроприводов, выполненных по схеме Г-Д. Использование отрицательной связи по току якоря в сочетании с критической положительной связью по напряжению генератора в системе Г-Д обеспечивает благоприятные характеристики и динамические свойства многих электроприводов действующих установок в различных отраслях промышленности.
При настройке контура регулирования момента (тока) на технический оптимум в системе ТП-Д путем последовательной коррекции роль фильтра может выполнять постоянная интегрирования Тн ПИ-регулятора, но только в области высоких частот механических колебаний. При суммарной некомпенсируемой постоянной T<0,01 с быстродействие контура при aм=2 высоко и электромеханическая связь на частотах 12=1030 1/с ослабляется существенно. Уменьшить быстродействие и сохранить демпфирование можно путем выбора ам>2. Однако при этом необходимо проверить, не снижается ли при больших ам динамическая точность регулирования момента до недопустимого уровня.
В заключение отметим, что электропривод по системе ИТ-Д без обратных связей обладает свойствами практически идеального источника момента В таком электроприводе демпфирование упругих колебаний со стороны электрической части системы невозможно, так как связь электрических и механических процессов в системе отсутствует, и механические колебания не оказывают влияния на развиваемый двигателем электромагнитный момент.