

7.7. Частотное регулирование момента асинхронного электропривода
Управляемость асинхронного электропривода, аналогичная управляемости электропривода постоянного тока при Uя=const и Ф=const, обеспечивается путем одновременного регулирования частоты f1 и напряжения U1 или тока I1 статорной обмотки.
Этот
способ регулирования момента реализуется
в системе ПЧ-АД, основные особенности
которой были подробно рассмотрены в
§6.5. При выполнении условий, для которых
справедливо линеаризованное уравнение
механической характеристики асинхронного
двигателя при питании от источника
напряжения (см. §3.11) и от источника тока
(см. §3.12), при регулировании момента
можно использовать структурную схему
асинхронного электропривода, представленную
на рис.6.14. Если, например, при поддержании
постоянным потока 1=const
замкнуть систему отрицательной обратной
связью по моменту М с коэффициентом
обратной связи по моменту kом,
асинхронный электропривод приобретет
свойства, подробно рассмотренные для
обобщенной системы УП-Д в §7.4. 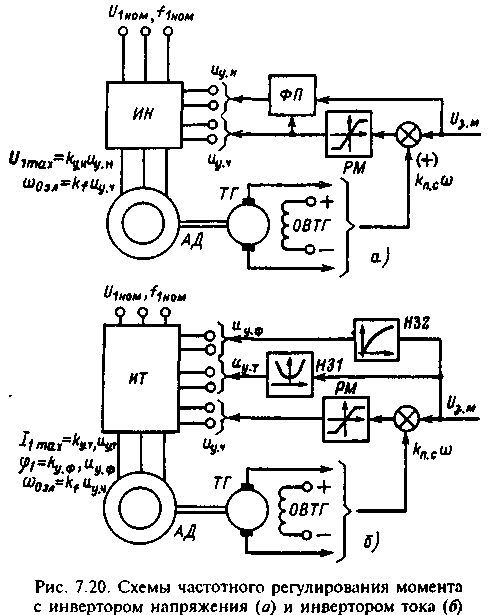 Однако
реализация рассмотренного там способа
регулирования момента по отклонению в
применении к асинхронному электроприводу
вызывает практические трудности. Важной
особенностью асинхронного электропривода
является отсутствие простых способов
измерения электромагнитного момента
двигателя. Без принятия специальных
мер, рассматриваемых в §8.9, момент
асинхронного двигателя нелинейно
зависит от доступного для измерения
тока статора, и реализовать обратную
связь по моменту с помощью связи по
току, как в электроприводе постоянного
тока, здесь не удается. Как следствие,
во многих практических случаях от
автоматического регулирования момента
по отклонению отказываются и прибегают
к использованию компенсационного
способа управления с помощью положительной
обратной связи по скорости. Как показано
на рис.7.20,а и б, для измерения скорости
на валу двигателя устанавливается
тахогенератор ТГ, ЭДС которого eтг
при постоянном
потоке Фтг
пропорциональна скорости:
Однако
реализация рассмотренного там способа
регулирования момента по отклонению в
применении к асинхронному электроприводу
вызывает практические трудности. Важной
особенностью асинхронного электропривода
является отсутствие простых способов
измерения электромагнитного момента
двигателя. Без принятия специальных
мер, рассматриваемых в §8.9, момент
асинхронного двигателя нелинейно
зависит от доступного для измерения
тока статора, и реализовать обратную
связь по моменту с помощью связи по
току, как в электроприводе постоянного
тока, здесь не удается. Как следствие,
во многих практических случаях от
автоматического регулирования момента
по отклонению отказываются и прибегают
к использованию компенсационного
способа управления с помощью положительной
обратной связи по скорости. Как показано
на рис.7.20,а и б, для измерения скорости
на валу двигателя устанавливается
тахогенератор ТГ, ЭДС которого eтг
при постоянном
потоке Фтг
пропорциональна скорости:
![]()
при этом уравнение для канала регулирования частоты имеет вид
![]() (7.63)
(7.63)
где kp м - коэффициент усиления регулятора момента РМ.
В соответствии со структурной схемой на рис.7.11 при учете (7.63) можно записать
![]()
![]()
Подбором значений kp м и kп c обеспечивается критическая положительная связь по скорости
![]()
при этом уравнение механической характеристики запишется в виде
![]()
где
![]()
Разрешим (7.63) относительно uзм
![]()
С учетом (7.65) получим
![]()
![]()
Соотношение (7.67) свидетельствует о том, что в схемах на рис.7.20 сигнал задания момента пропорционален абсолютному скольжению двигателя sa, поэтому рассматриваемый компенсационный способ иногда называют управлением по абсолютному скольжению.
М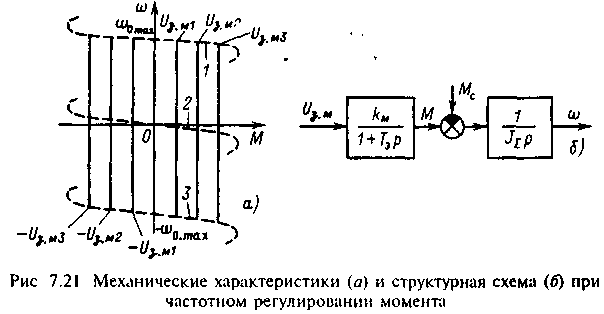 еханические
характеристики =f(М),
соответствующие (7.66) при p=0,
представлены на рис.7.21,д. Они построены
в предположении, что преобразователь
частоты обладает способностью рекуперации
энергии в сеть. Если преобразователь
не обеспечивает такой возможности, во
втором и четвертом квадрантах механические
характеристики существуют в узкой
области, ограниченной осью абсцисс и
характеристикой динамического торможения
2.
еханические
характеристики =f(М),
соответствующие (7.66) при p=0,
представлены на рис.7.21,д. Они построены
в предположении, что преобразователь
частоты обладает способностью рекуперации
энергии в сеть. Если преобразователь
не обеспечивает такой возможности, во
втором и четвертом квадрантах механические
характеристики существуют в узкой
области, ограниченной осью абсцисс и
характеристикой динамического торможения
2.
При преобразователе частоты, способном передавать энергию как в прямом, так и в обратном направлениях, при критической положительной связи по скорости обеспечивается астатическое регулирование момента в пределах, ограниченных перегрузочной способностью двигателя (M<Мк) и при изменении скорости от характеристики 1, соответствующей 0=0max=const, до характеристики 3, соответствующей противоположному направлению вращения поля и максимальной частоте преобразователя частоты 0=-0mах.
Перегрузочная способность Мк в данной схеме зависит от способа управления полем двигателя. Наименьшая перегрузочная способность соответствует регулированию при 1=const, наибольшая - при 2=const, причем она ограничивается насыщением магнитной цепи машины и запасом по напряжению преобразователя частоты как при питании от источника напряжения (см. рис.7 20,a), так и при питании от источника тока (см. рис.7.20,б).
В схеме с инвертором напряжения для регулирования потока в канале управления напряжением uун предусматривается функциональный преобразователь ФП, на вход которого подаются сигнал uуч, пропорциональный 0эл, и сигнал uзм, пропорциональный абсолютному скольжению sa. В функции этих величин функциональный преобразователь определяет сигнал задания напряжения uун в при 1=1ном=const или 2=2нoч=const. В частности, при 1=const сигнал uун=U1/kун вычисляется по соотношению (6.17а).
В схеме с инвертором тока (см. рис.7.20,б) в канал регулирования тока uут введено нелинейное звено Н31, которое формирует сигнал задания uут в нелинейной зависимости от sa, определяемой соотношением (6.176) при 2=2max=const:

Для
поддержания постоянным вектора
потокосцеплсния
![]() в динамике на рис.7.20,б у инвертора тока
предусмотрен вход управления фазой
тока 1.
В канал регулирования фазы тока введено
нелинейное звено Н32, реализующее
зависимость от абсолютного скольжения,
определяемую по (6.17в):
в динамике на рис.7.20,б у инвертора тока
предусмотрен вход управления фазой
тока 1.
В канал регулирования фазы тока введено
нелинейное звено Н32, реализующее
зависимость от абсолютного скольжения,
определяемую по (6.17в):
Динамические свойства электропривода с рассматриваемым способом регулирования момента определяются (7.66), которое вместе с уравнением движения позволяет построить структурную схему, представленную на рис.7.21,б.
Рассматривая эту структурную схему, можно заключить, что при задании момента скачком он нарастает до заданного значения М3=kмUзм по экспоненте и через (34)TЭ устанавливается на заданном уровне М=М3=const Под действием постоянного момента электропривод при Мс=const движется равномерно ускоренно до тех пор, пока нарастающая частота f1(0эл) не достигнет максимального значения f1max(0злmax). Далее при f1=f1maх=const движение электропривода при данном моменте нагрузки Мс определяется механической характеристикой 1 (рис.7.21,а).