

7.6. Особенности регулирования момента и тока в системе г-д
Для реализации стандартной настройки на технический оптимум контура регулирования момента в системе Г-Д при последовательной коррекции имеются две возможности: непосредственная коррекция и введение подчиненного контура регулирования ЭДС генератора или его тока возбуждения.
Так же как и в системе ТП-Д, регулирование момента в системе Г-Д осуществляется с помощью отрицательной обратной связи по току якорной цепи. Структурная схема контура регулирования тока, учитывающая влияние внутренней связи по ЭДС двигателя в виде независимого возмущения по скорости, представлена на рис.7.18,а.
Если принять, что компенсации подлежат большая постоянная Тг и средняя Tя, то T=Tтв<0,01 с, при этом передаточная функция регулятора тока получается в виде

где
![]()
П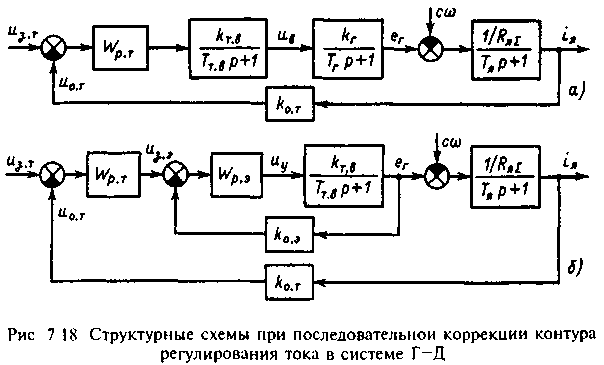 олучена
передаточная функция ПИД-рсгулятора.
Свойства электропривода при этом в
пределах линейности системы совпадают
с рассмотренными выше для системы УП-Д
с быстродействующим преобразователем.
Если использование ПИД-регуля-тора
нежелательно, можно отказаться от
компенсации постоянной Тя,
положив Tм=Tтв+Тя>0,01
с. Передаточная функция регулятора тока
при этом получается в виде
олучена
передаточная функция ПИД-рсгулятора.
Свойства электропривода при этом в
пределах линейности системы совпадают
с рассмотренными выше для системы УП-Д
с быстродействующим преобразователем.
Если использование ПИД-регуля-тора
нежелательно, можно отказаться от
компенсации постоянной Тя,
положив Tм=Tтв+Тя>0,01
с. Передаточная функция регулятора тока
при этом получается в виде
![]()
Полученный ПИ-регулятор удобен в реализации, но увеличение суммарной некомпенсируемой постоянной Т=TТв+Тя определяет соответствующее снижение быстродействия контура и уменьшение точности регулирования. Это ухудшение свойств контура регулирования тем более значительно, чем больше Тя. Поэтому при повышенных значениях Тя более благоприятные условия регулирования тока и момента обеспечиваются введением подчиненного контура регулирования ЭДС генератора (рис.7 18,б).
Применив уже неоднократно использованный выше метод определения передаточной функции регулятора для контура регулирования ЭДС, получим
![]()
где
![]()
Замкнутый контур регулирования ЭДС имеет передаточную функцию

Следовательно, благодаря введению подчиненного контура регулирования ЭДС передаточная функция объекта регулирования тока принимает вид

В контуре регулирования тока якоря осталась одна подлежащая компенсации постоянная Тя, но некомпенсируемая инерционность контура возросла Тт=аэТ Отсюда регулятор тока должен иметь следующую передаточную функцию
![]()
где Tит=(kот/kоэRя)aтaэT.
Таким образом, введение подчиненного контура регулирования ЭДС позволяет ограничиться применением ПИ-регуляторов. Полученная в результате коррекции передаточная функция замкнутого контура тока якоря имеет вид
![]()
При настройке на технический оптимум (aэ=aт=2) динамические свойства контура регулирования тока качественно получаются такими же, как и в системе с быстродействующим преобразователем, однако количественно быстродействие контура и точность регулирования тока и момента ухудшаются в 2 раза Сравнивая вариант одноконтурной системы с ПИ-регулятором тока (7 48) с двухконтурной, можно заключить, что при TТВ+TЯ<2TТВ быстродействие и точность регулирования в одноконтурной системе выше, чем в двухконтурной. При ТTВ+Тя>2TТВ, предпочтителен вариант двухконтурной системы, особенно в тех случаях, когда возможность ограничения максимальной ЭДС генератора представляет практический интерес
Для ограничения ЭДС генератора значением EгEгmax в структуре на рис.7.18,б достаточно ограничить выходное напряжение регулятора тока, которое является сигналом задания ЭДС генератора, значением Uзэmax
Весьма большая постоянная времени генератора Tг является важной особенностью системы Г-Д Необходимо иметь в виду, что компенсация постоянной Тг исключает эту инерционность из контура только математически Физически она в контуре регулирования присутствует, и се влияние компенсируется соответствующим форсированием напряжения возбуждения только в пределах, ограниченных предусмотренным запасом по напряжению
UBmax=UBном
Высокое быстродействие контура регулирования при стандартной настройке требует соответственно быстрых изменений ЭДС генератора Для изменения ЭДС генератора по закону ег=(dг /dt)max·t=(dг/dt)max/p к его обмотке возбуждения в соответствии с передаточной функцией необходимо приложить напряжение
![]()
Если при этом Ег<<Eгном, (7 54) можно упростить:
![]()
Этим же соотношением можно воспользоваться для определения требуемых форсировок возбуждения генератора для изменения ЭДС генератора по синусоидальному закону ег=Eг maxsint, при этом подстановка в (7.55) амплитуды производной от es дает
![]()
Уравнение (7.56) свидетельствует о том, что в связи с большим значением Тг напряжение UBном должно быстро возрастать с увеличением частоты и амплитуды колебаний ЭДС. Пренебрегая насыщением магнитной цепи генератора, с помощью (7 56) оценим требуемый запас по напряжению возбуждения на частоте среза контура регулирования тока, настроенного на технический оптимум
![]()
![]()
Следовательно, в данном режиме требуется коэффициент форсирования

При ограниченном запасе по напряжению возбудителя а пределы частот и амплитуд колебаний, в которых система Г-Д остается линейной системой, ограничены:
![]()
Если условие (7.59) не выполняется, система регулирования является нелинейной, главным образом, из-за нелинейности характеристики возбудителя. При этом все полученные выше оценки быстродействия и точности регулирования могут быть недостаточно достоверными. Поэтому при проектировании электроприводов по системе Г-Д с последовательной коррекцией контуров регулирования ЭДС, тока якоря и других координат системы необходимо проверять достаточность принятого запаса по напряжению возбудителя для реализации стандартных показателей регулирования.
С помощью уравнения электрического равновесия якорной цепи Г-Д
![]()
можно определить производную ЭДС генератора как функцию регулируемой координаты:
![]()
![]()
Зависимость iя*=f(t) при настройке на технический оптимум определяется соотношением (6.32)

Соответствующие зависимости diя*/dt=f(t) и d2iя*/dt2=f(t) могут быть получены с помощью (7.61). Подстановка этих зависимостей в (7.60) позволяет рассчитать кривую dг/dt=f(t), определить по ней (dг/dt)max и далее с помощью (7.55) вычислить требуемое максимальное напряжение возбудителя Uвmax=тр·Uв.ном
Если полной реализации возможного при настройке на технический оптимум быстродействия не требуется, можно ограничиться выбором о^р по заданному времени пуска (см. §6.3). При этом для определения динамических показателей качества и точности регулирования необходим расчет переходных процессов в системе с учетом основных нелинейностей, который целесообразно выполнять с помощью ЭВМ.