

4.4. Динамические свойства электропривода с линейной механической характеристикой при жестких механических связях
При изучении свойств механической части электропривода было установлено, что во многих практических случаях влияние упругих колебаний на движение первой массы пренебрежимо мало. Имея в виду сочетания параметров механической части, при которых это условие выполняется, принимаем в (4.5) с12=, ф1=2=ф, 1=2=. В результате получаем

С истеме
уравнений (4.11) соответствует структурная
схема электропривода, представленная
на рис.4.7. Эта схема заслуживает детального
анализа, так как отражает основные
свойства большого числа конкретных
электромеханических систем при с12=.
Наиболее полно она соответствует
электроприводу постоянного тока с
компенсированным двигателем независимого
возбуждения. В пределах рабочего участка
механической характеристики она
удовлетворительно описывает динамику
асинхронного электропривода как при
питании от источника напряжения, так и
при питании от источника тока. При
линеаризации механической характеристики
двигателя с последовательным возбуждением
данная схема позволяет анализировать
свойства таких электроприводов в области
малых отклонений от выбранной точки
статической характеристики. В последнем
случае область соответствия (4.11) объекту
расширяется при возрастании насыщения
магнитной цепи.
истеме
уравнений (4.11) соответствует структурная
схема электропривода, представленная
на рис.4.7. Эта схема заслуживает детального
анализа, так как отражает основные
свойства большого числа конкретных
электромеханических систем при с12=.
Наиболее полно она соответствует
электроприводу постоянного тока с
компенсированным двигателем независимого
возбуждения. В пределах рабочего участка
механической характеристики она
удовлетворительно описывает динамику
асинхронного электропривода как при
питании от источника напряжения, так и
при питании от источника тока. При
линеаризации механической характеристики
двигателя с последовательным возбуждением
данная схема позволяет анализировать
свойства таких электроприводов в области
малых отклонений от выбранной точки
статической характеристики. В последнем
случае область соответствия (4.11) объекту
расширяется при возрастании насыщения
магнитной цепи.
Таким образом, рассмотрение свойств электромеханической системы, описываемой (4.11), дает представления о динамических особенностях большинства промышленных разомкнутых систем электропривода, при этом отдельного рассмотрения требуют лишь свойства синхронного электропривода в связи с отличием (4.10) от (4.11).
Для анализа свойств электропривода с линейной механической характеристикой как объекта автоматического управления получим передаточную функцию системы по управляющему воздействию. В соответствии с рис.4.7
![]()
где Тм=J/ - электромеханическая постоянная времени. Передаточная функция по возмущающему воздействию - моменту статической нагрузки Мс - имеет вид

Характеристическое уравнение системы
![]()
Корни характеристического уравнения

где m=ТM/ТЭ - отношение постоянных времени электропривода.
Значение m является важным показателем динамических свойств электропривода, непосредственно определяющим колебательность разомкнутой электромеханической системы при жестких механических связях. Если m>4, то
![]()
Соответственно передаточная функция (4.12) может быть при таких параметрах преобразована к виду
![]()
где T1=1/; Т2=1/2.
Следовательно, при m>4 рассматриваемый электропривод для анализа может быть представлен в виде последовательного соединения двух инерционных звеньев с постоянными времени T1 и Т2 Частотные характеристики электропривода при таком сочетании параметров имеют вид, показанный на рис.4.8,a. Реакцию электропривода на скачок управляющего воздействия при нулевых начальных условиях и Мс=0 характеризуют соответствующие (4.15) переходная функция
![]()
и импульсная (весовая) функция
![]()
 Соответствующие
(4.16) и (4.17) зависимости представлены на
рис.4.8,б. Зависимость h(t)
дает представление о законе изменения
скорости электропривода (t)
при приложении к якорю двигателя
постоянного тока скачка напряжения Uя
или изменении частоты тока статора
асинхронного двигателя f1
скачком. Из уравнения движения при М=0
следует, что весовая функция h'(t)
здесь характеризует в определенном
масштабе изменения электромагнитного
момента двигателя M(t).
Максимум момента Mmax
~ h'max
возрастает
при увеличении скачка управляющего
воздействия, поэтому при использовании
(4.16) и (4.17) скачок uя
или f1
должен быть ограничен значением, при
котором Мmах
остается в пределах, допустимых по
перегрузочной способности двигателя
или по условиям линеаризации механической
характеристики.
Соответствующие
(4.16) и (4.17) зависимости представлены на
рис.4.8,б. Зависимость h(t)
дает представление о законе изменения
скорости электропривода (t)
при приложении к якорю двигателя
постоянного тока скачка напряжения Uя
или изменении частоты тока статора
асинхронного двигателя f1
скачком. Из уравнения движения при М=0
следует, что весовая функция h'(t)
здесь характеризует в определенном
масштабе изменения электромагнитного
момента двигателя M(t).
Максимум момента Mmax
~ h'max
возрастает
при увеличении скачка управляющего
воздействия, поэтому при использовании
(4.16) и (4.17) скачок uя
или f1
должен быть ограничен значением, при
котором Мmах
остается в пределах, допустимых по
перегрузочной способности двигателя
или по условиям линеаризации механической
характеристики.
При m=4 характеристическое уравнение системы имеет два равных отрицательных корня: р12=-=-1/2Тэ. В этом случае передаточная функция (4.12) преобразуется к виду
![]()
где T=1/а.
Э лектропривод
при таком сочетании параметров обладает
свойствами, аналогичными рассмотренным
для m>4.
В этом можно убедиться, сравнивая
приведенные на рис.4.9 частотные и
переходные характеристики, соответствующие
(4.18), с такими же зависимостями на рис.4.8.
Графики переходной h(t)
и весовой h'(t)
функций построены на рис.4.9,б по выражениям
лектропривод
при таком сочетании параметров обладает
свойствами, аналогичными рассмотренным
для m>4.
В этом можно убедиться, сравнивая
приведенные на рис.4.9 частотные и
переходные характеристики, соответствующие
(4.18), с такими же зависимостями на рис.4.8.
Графики переходной h(t)
и весовой h'(t)
функций построены на рис.4.9,б по выражениям
При сочетаниях параметров, которым соответствуют значения m<4, характеристическое уравнение имеет комплексно-сопряженные корни
![]()
и электропривод представляет собой колебательное звено с коэффициентом затухания <1, уменьшающимся по мере уменьшения т. Учитывая обозначения коэффициентов передаточной функции колебательного звена, принятые в теории управления, можно записать
![]()
С помощью (4.19) установим связь между параметрами электропривода и обобщенного колебательного звена:
![]()
Значениям
m<4
соответствуют коэффициенты затухания
<1.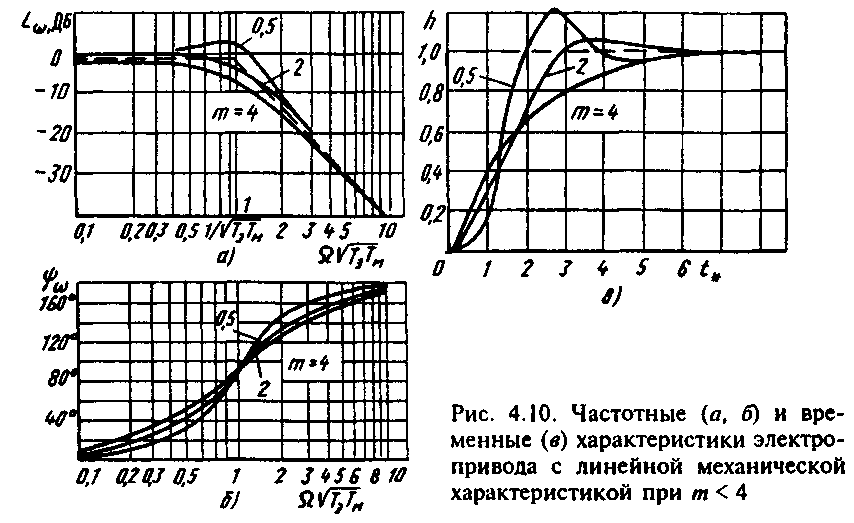
Частотные характеристики колебательного звена при m=0,5;2;4 (=0,35;0,71;1) представлены на рис.4.10,а,б. Они показывают, что при уменьшении m колебательность электропривода возрастает и при m<2 (<0,71) в ЛАЧХ проявляется резонансный пик, быстро возрастающий с уменьшением m. Переходная функция электропривода при m<4 выражается соотношением

Импульсная функция:

На рис.4.10,б представлен ряд зависимостей h(t*), где t*=t/Tэ, соответствующих тем же значениям m, что и на рис.4.10,а. Рассматривая (4.14) и (4.21), можно установить, что общее время затухания колебаний зависит только от Тэ Так как Тэ=TM/m при данной постоянной Tм, затухание и частота колебаний определяются соотношением постоянных m. Только от m зависит и показатель колебательности - логарифмический декремент колебаний:
П![]() ри
m=2
и
=6,28
колебания затухают практически за один
период, а скорость электропривода
достигает установившегося значения
с небольшим превышением его в переходном
процессе, составляющим около 5%
установившегося значения. При m<2
затухание колебаний ухудшается, и в
переходном процессе максимальные
значения скорости все в большей мере
превышают установившееся значение. При
данном m общее время переходного процесса
увеличивается пропорционально увеличению
ТM.
Представленные на рис.4.8-4.10 ЛФЧХ ()
свидетельствуют о том, что при одинаковом
максимальном угле сдвига колебаний по
фазе max=-
с уменьшением m
изменения фазы в области частоты
недемпфированного электромеханического
резонанса эм=1/T1=1/ТэТм
становятся все более быстрыми.
ри
m=2
и
=6,28
колебания затухают практически за один
период, а скорость электропривода
достигает установившегося значения
с небольшим превышением его в переходном
процессе, составляющим около 5%
установившегося значения. При m<2
затухание колебаний ухудшается, и в
переходном процессе максимальные
значения скорости все в большей мере
превышают установившееся значение. При
данном m общее время переходного процесса
увеличивается пропорционально увеличению
ТM.
Представленные на рис.4.8-4.10 ЛФЧХ ()
свидетельствуют о том, что при одинаковом
максимальном угле сдвига колебаний по
фазе max=-
с уменьшением m
изменения фазы в области частоты
недемпфированного электромеханического
резонанса эм=1/T1=1/ТэТм
становятся все более быстрыми.
Сравнивая (4.12) и (4.13), можно убедиться, что при колебаниях нагрузки электромагнитная инерция определяет при прочих равных условиях более высокие амплитуды колебаний скорости в области резонанса в связи с наличием в числителе (4.13) передаточной функции форсирующего звена с постоянной времени Тэ.
Таким образом, электропривод с линейной механической характеристикой вследствие электромагнитной инерции представляет собой при жестких механических связях колебательное звено, показатели колебательности которого и зависят только от соотношения постоянных времени m=ТМ/ТЭ, а быстродействие определяется электромагнитной постоянной времени Тэ или при данном m - электромеханической постоянной времени ТM.
При работе на естественной характеристике значения Тэ лежат в пределах Тэ=0,010,1с, причем для асинхронных двигателей Тэ при питании от источника напряжения меньше, чем для двигателей постоянного тока той же мощности. Электромеханическая постоянная Тм изменяется в более широких пределах, и ее удобно выразить через расчетную величину - электромеханическую постоянную времени собственно двигателя - и отношение моментов инерции электропривода J и якоря двигателя Jдв:
![]()
Для двигателей мощностью выше 10 кВт ориентировочно Т=0,010,1 с, причем обычно постоянная времени TМ.ДВ соизмерима или близка Тэ. Поэтому для электроприводов с небольшим моментом инерции механизма наиболее вероятные значения m заключены в пределах 0,5<m<2, а для электроприводов со значительной инерцией механизма m>2. Из изложенного следует, что в этих пределах резонансное усиление колебаний невелико и электропривод представляет собой колебательное звено с высоким коэффициентом демпфирования >0,4.
Это обстоятельство при рассмотрении электропривода с линейной механической характеристикой как объекта автоматического регулирования позволяет прибегать к упрощенному представлению передаточной функции (4.12) в виде

т. е. заменять колебательное звено двумя апериодическими с постоянной Т1=TэTM. Асимптотическая ЛАЧХ, соответствующая (4.24), при <1/Т1 имеет вид горизонтальной прямой, совпадающей с осью абсцисс, а при >/T1, представляет собой прямую с наклоном -40 дБ/дек (штриховая линия на рис.4.10,а). Сравнивая эту зависимость с реальными ЛАЧХ колебательного звена при различных значениях , можно установить, что при >0,4 расхождения незначительны. Погрешность в сторону занижения амплитуды при >0,4 не превышает 3 дБ, что обычно допустимо.
Для многих электроприводов малой мощности m>4, при этом можно пренебречь электромагнитной инерцией, положив в (4.11)
![]()
С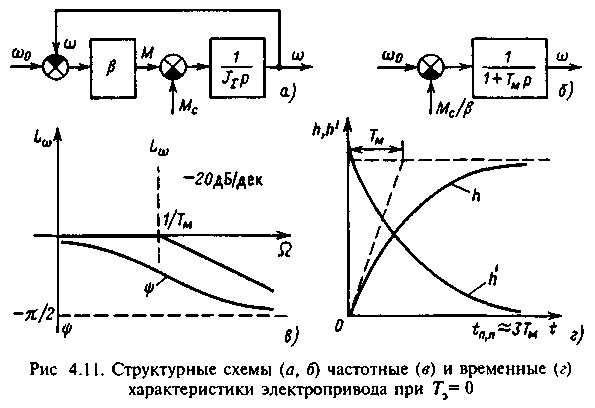 труктурная
схема, соответствующая (4.25), приведена
на рис.4.11,a.
Ее нетрудно преобразовать к виду
рис.4.11,б, который свидетельствует о том,
что при этих параметрах электропривод
с линейной механической характеристикой
приближенно представляет собой
инерционное звено с постоянной времени
ТM.
Частотные характеристики электропривода,
соответствующие такому представлению,
показаны на рис.4.11,в, а переходная и
весовая функции, определяемые соотношениями
труктурная
схема, соответствующая (4.25), приведена
на рис.4.11,a.
Ее нетрудно преобразовать к виду
рис.4.11,б, который свидетельствует о том,
что при этих параметрах электропривод
с линейной механической характеристикой
приближенно представляет собой
инерционное звено с постоянной времени
ТM.
Частотные характеристики электропривода,
соответствующие такому представлению,
показаны на рис.4.11,в, а переходная и
весовая функции, определяемые соотношениями
построены на рис.4.11,г. С помощью этого рисунка можно пояснить физический смысл электромеханической постоянной времени. Электромеханическая постоянная Тм представляет собой время, за которое электропривод достиг бы установившейся скорости, двигаясь равномерно ускоренно под действием постоянного динамического момента, равного начальному значению:
![]()
Сравнивая кривые, приведенные на рис.4.11, с аналогичными кривыми на рис.4.8, которые соответствуют m>4 при учете электромагнитной инерции, можно сделать следующие выводы. При анализе переходных процессов в разомкнутой системе электропривода при m>4, как правило, можно без большой погрешности пренебрегать влиянием электромагнитной инерции и принимать Тэ0. При синтезе замкнутых систем регулирования координат электромеханической системы малую постоянную Тэ при m>4 следует учитывать во избежание ошибок, вносимых неучетом потери запаса по фазе на частоте среза контура регулирования, обусловленной электромагнитной инерцией электромеханического преобразователя.