

3.11. Статические характеристики асинхронных двигателей
Для получения выражений статических характеристик с помощью приведенной на рис.3.27,б упрощенной схемы замещения определим вначале ток фазы ротора как функцию параметров двигателя:
![]()
где хк=х1 + х2' - индуктивное сопротивление короткого замыкания
Активная электромагнитная мощность, передаваемая через воздушный зазор ротору двигателя, может быть записана в виде

или же через электромагнитный момент и скорость поля двигателя:
![]()
Приравнивая (3.74) и (3.75), получаем уравнение статической механической характеристики двигателя в виде зависимости

Анализ функции (3.76) показывает, что она имеет точки экстремума; критическое скольжение, соответствующее экстремуму, может быть определено путем дифференцирования (3.76) по s и последующего приравнивания нулю этой производной:
![]()
Подставляя (3.77) в (3.76), получаем выражение критического момента:

С учетом (3.77) и (3.78) уравнение (3.76) может быть после преобразований представлено в форме так называемой уточненной формулы Клосса:

где а=R1/R'
Нетрудно видеть, что при s<<sk механическая характеристика близка к линейной зависимости M=2MK·s/sK, а в области больших скольжений (s>>sk) имеет гиперболический характер: М=2MK·sK/s. При s=sk момент принимает максимальные значения, причем в двигательном режиме (SКДВ>0) соответствующее значение критического момента Мкдв, как это следует из (3.78), меньше, чем МК1 генераторном режиме (sKГ <0). С помощью (3.78) можно эту разницу оценить количественно

где |sk| - модуль критического скольжения.
В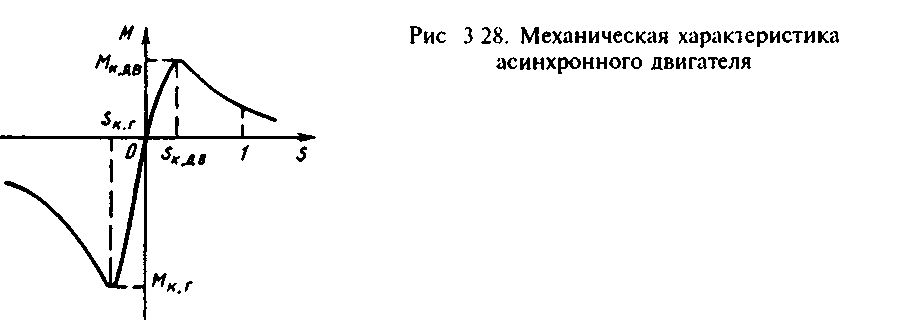 соответствии с изложенным механическая
характеристика асинхронного двигателя
M=f(s)
имеет вид, показанный на рис.3.28. Для
правильного понимания особенностей
статических режимов преобразования
энергии в асинхронном двигателе полезно
установить физические причины,
определяющие такой характер зависимости
момента двигателя от скольжения. С этой
целью получим формулу, связывающую
момент двигателя M,
ток I'2
и результирующий магнитный поток Ф.
соответствии с изложенным механическая
характеристика асинхронного двигателя
M=f(s)
имеет вид, показанный на рис.3.28. Для
правильного понимания особенностей
статических режимов преобразования
энергии в асинхронном двигателе полезно
установить физические причины,
определяющие такой характер зависимости
момента двигателя от скольжения. С этой
целью получим формулу, связывающую
момент двигателя M,
ток I'2
и результирующий магнитный поток Ф.
Результирующий поток связан с ЭДС двигателя соотношением

Исходя из выражения электромагнитной мощности, с учетом (3.81) можно записать
![]()
И![]() з
(3.82) следует, что зависимость момента
от скольжения определяется характером
изменений потока, тока ротора и соs
2
при изменениях
скольжения. Зависимость I'2=f(s)
была уже получена [см. (3.73)]. Рассматривая
формулу (3.73), можно убедиться, что при
возрастании момента в области двигательного
режима (s>0)
ток ротора монотонно возрастает, стремясь
при Sк
асимптоте:
з
(3.82) следует, что зависимость момента
от скольжения определяется характером
изменений потока, тока ротора и соs
2
при изменениях
скольжения. Зависимость I'2=f(s)
была уже получена [см. (3.73)]. Рассматривая
формулу (3.73), можно убедиться, что при
возрастании момента в области двигательного
режима (s>0)
ток ротора монотонно возрастает, стремясь
при Sк
асимптоте:
В генераторном режиме (s<0) легко обнаруживается максимум:I'2max=U1/xk, соответствующий Sгр=-R'/R1=-1/a, причем при s- ток ротора стремится к той же асимптоте, что и в двигательном режиме. Соответственно зависимость I2(s) имеет вид, показанный на рис.3.29,а.

Зависимость cos ф2 от скольжения (рис.3.29,б) можно получить с помощью схемы замещения рис.3.27,а:
![]()
Следовательно, cos 2 при возрастании модуля скольжения монотонно убывает, стремясь при s к нулю, и зависимость его от скольжения имеет вид, показанный на рис.3.29,б.
Если принять магнитный поток Ф=const, можно прийти к выводу, что в соответствии с (3.82) момент двигателя при малых скольжениях, где cos ф2 изменяется медленно, должен возрастать при увеличении скольжения примерно пропорционально току /2. В области больших скольжений ток I'2 приближается к значению I2пред и изменяется мало, при этом момент, как следует из (3.82), должен снижаться примерно по тому же закону, что и cos 2. Нетрудно видеть, что форма зависимости M=f(s) соответствует изложенному; максимум момента наступает при скольжении, которому соответствует d(I'2 cos 2)/ds=0.
В действительности ЭДС E1 и магнитный поток Ф двигателя при работе в двигательном режиме по мере роста нагрузки и связанного с ним падения напряжения в цепи статора снижаются. Снижение это имеет монотонный характер и добавляется к рассмотренному выше влиянию изменений cos ф2, не меняя характера зависимости M=f(s). Наличие максимума тока в кривой I'2=f(s) в области генераторного режима объясняется тем, что в связи с изменением фазы тока статора и падения напряжения на сопротивлении R1, ЭДС двигателя и поток Ф в области малых скольжений продолжают возрастать и превышают значения, соответствующие идеальному холостому ходу. При больших скольжениях определяющим становится падение напряжения на сопротивлении x1, здесь ЭДС и поток снижаются аналогично снижению ЭДС и потока в двигательном режиме работы. Этим обусловлены максимум ЭДС и потока в генераторном режиме и соответствующий ему максимум тока ротора. Как следствие, в соответствии с (3.81) максимум момента в генераторном режиме при R10 больше, чем в двигательном.
Естественная механическая характеристика =f(М) для асинхронного двигателя с фазным ротором представлена на рис.3.30,a. Рабочий участок характеристики, соответствующий кг>>кдв, обладает высокой жесткостью, модуль которой при М<Мном практически постоянен, а при Мном< М<Мк с возрастанием момента двигателя постепенно уменьшается и при =к становится равным нулю. Дальнейшее снижение скорости приводит к уменьшению электромагнитного момента, что соответствует изменению знака статической жесткости Рст, которая становится положительной. Этот участок характеристики вплоть до =0 обычно для двигателей с фазным ротором не используется, и форма характеристики в этой области для таких двигателей существенного значения не имеет. Как показано на рис.3.30,а, двигательному режиму работы соответствуют скольжения от s=1 до s=0.
Е сли
ротор двигателя вращать против поля
(<
0, s>1),
двигатель переходит в тормозной режим
противовключения. В этом режиме на
естественной характеристике двигателя
с фазным ротором поток снижен, cos
2
весьма мал, поэтому двигатель развивает
небольшие значения тормозного момента,
потребляя из сети в основном реактивный
ток, превышающий номинальный в 5-10 раз.
Поэтому режим противовключения на
естественной характеристике двигателя
с фазным ротором также на практике не
используется.
сли
ротор двигателя вращать против поля
(<
0, s>1),
двигатель переходит в тормозной режим
противовключения. В этом режиме на
естественной характеристике двигателя
с фазным ротором поток снижен, cos
2
весьма мал, поэтому двигатель развивает
небольшие значения тормозного момента,
потребляя из сети в основном реактивный
ток, превышающий номинальный в 5-10 раз.
Поэтому режим противовключения на
естественной характеристике двигателя
с фазным ротором также на практике не
используется.
Область >0 (s<0) соответствует генераторному режиму работы параллельно с сетью. При 0<<кг подводимая к двигателю механическая энергия частично теряется в двигателе в виде теплоты, а в основном отдается в сеть. Однако при дальнейшем возрастании скорости и соответствующем увеличении частоты тока ротора происходит постепенное уменьшение коэффициента мощности двигателя, который при s=srp становится равным нулю. При скорости гр, соответствующей sгр, отдаваемая в сеть активная мощность равна нулю, т.е. вся подведенная к двигателю механическая энергия теряется в виде теплоты в двигателе. Поэтому при 0<<гр имеет место режим рекуперативного торможения, при =гр наступает режим динамического торможения, а при >гр двигатель начинает потреблять энергию из сети, как и при режиме противовключения.
Максимальное значение момента двигателя в двигательном режиме определяет его перегрузочную способность. При этом необходимо иметь в виду, что Мк зависит от квадрата приложенного напряжения U1, вследствие чего асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. В каталожных данных для асинхронных двигателей указывается перегрузочная способность двигателя при номинальном напряжении =МК/МНОМ . При определении момента допустимой перегрузки следует учитывать возможное снижение напряжения сети на 10%:
![]()
Электромеханические
естественные характеристики асинхронного
двигателя =f(I1)
и =f(I'2)
показаны на рис.3.30,б. Зависимость =f(I'2)
построена с помощью (3.73) и соотношения
=0(1
- s)
(сплошная кривая). В ней отражены все
рассмотренные выше особенности
зависимости I'2=f(s)
(рис.3.29,а) Кривая =f(I1)
в основном повторяет форму кривой
=f(I'2),
так как определяется соотношением
![]() .
Она показана на рис.3.30,б штриховой
кривой, которая имеет наиболее значительные
отклонения от кривой =f(I'2)
в области идеального холостого хода.
Действительно, при =0
ток ротора равен нулю, а статор потребляет
из сети ток холостого хода I0,
основной составляющей которого является
намагничивающий ток I0.
По мере роста тока ротора эти кривые
сближаются.
.
Она показана на рис.3.30,б штриховой
кривой, которая имеет наиболее значительные
отклонения от кривой =f(I'2)
в области идеального холостого хода.
Действительно, при =0
ток ротора равен нулю, а статор потребляет
из сети ток холостого хода I0,
основной составляющей которого является
намагничивающий ток I0.
По мере роста тока ротора эти кривые
сближаются.
Д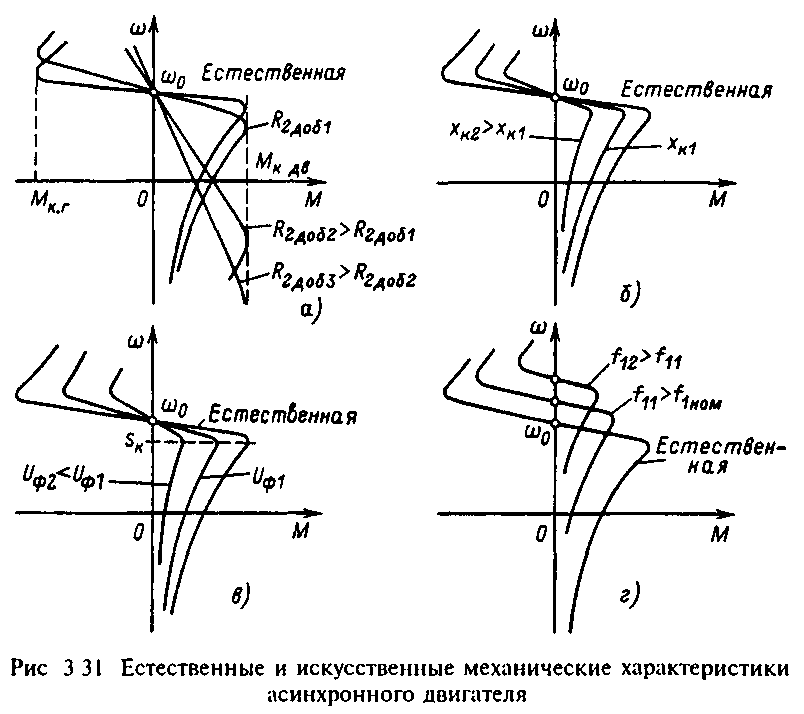 вигатель
с фазным ротором благодаря выведенным
на контактные кольца выводам роторной
обмотки обеспечивает возможность
изменения параметров цепи ротора путем
введения различных добавочных
сопротивлений. Наиболее широко
используется включение в цепь ротора
добавочных активных сопротивлений, как
показано на рис.3.26,а. При этом в соответствии
с (3.78) максимум момента Мк
не претерпевает изменений, а критическое
скольжение (3.77) увеличивается
пропорционально суммарному сопротивлению
роторной цепи R2=R'2+R'2Д0б
- Поэтому механические характеристики
двигателя при введении в ротор добавочных
активных сопротивлений имеют вид,
показанный на рис.3.31,a.
вигатель
с фазным ротором благодаря выведенным
на контактные кольца выводам роторной
обмотки обеспечивает возможность
изменения параметров цепи ротора путем
введения различных добавочных
сопротивлений. Наиболее широко
используется включение в цепь ротора
добавочных активных сопротивлений, как
показано на рис.3.26,а. При этом в соответствии
с (3.78) максимум момента Мк
не претерпевает изменений, а критическое
скольжение (3.77) увеличивается
пропорционально суммарному сопротивлению
роторной цепи R2=R'2+R'2Д0б
- Поэтому механические характеристики
двигателя при введении в ротор добавочных
активных сопротивлений имеют вид,
показанный на рис.3.31,a.
Рассматривая эти характеристики, можно установить, что введение добавочных активных сопротивлений в цепь ротора при пуске двигателя и при торможении противовключенисм является эффективным средством ограничения тока и повышения момента двигателя. Переключением сопротивлений можно обеспечить работу двигателя во всех режимах в пределах рабочего участка механических характеристик. В частности, плавным уменьшением сопротивления R'2доб при торможении противовключением и последующем пуске в противоположном направлении можно обеспечить постоянство тормозного и пускового моментов двигателя в этих режимах.
Модуль жесткости рабочего участка механической характеристики при введении сопротивления находится при данном М в обратно пропорциональной зависимости от R'2, поэтому реостатные характеристики двигателя при больших добавочных сопротивлениях имеют невысокую жесткость.
Искусственные характеристики, соответствующие изменению хк, которое может быть достигнуто введением добавочных индуктивных сопротивлений в цепь статора или ротора, представлены на рис.3.31,д. В соответствии с (3.77) и (3.78) увеличение хк приводит к уменьшению sk и Мк, этим и объясняется форма указанных характеристик. Заметим, что последовательное введение в силовую цепь двигателя емкостного сопротивления позволяет снижать xk и вследствие этого увеличивать перегрузочную способность двигателя. Однако на практике эта возможность в связи с трудностями реализации используется редко.
Характеристики, показанные на рис.3.31,б, дают представление и о форме искусственных механических характеристик, которые могут быть получены введением добавочных активных сопротивлений в цепь статора R1доб. Как это следует из соотношений (3.77) и (3.78), этот параметр влияет на sk и Мк аналогично влиянию хк
Несколько подробнее необходимо остановиться на влиянии на электромеханические свойства асинхронного двигателя изменений напряжения и частоты тока, подводимого к его статору. В пределах рабочего участка механической характеристики, когда ток статора не превышает существенно номинальное значение, ЭДС двигателя E1 незначительно отличается от напряжения сети, поэтому можно приближенно записать
![]()
Из (3.84) следует, что при неизменной частоте (f1=const) изменения напряжения приводят к соответствующим изменениям магнитного потока двигателя. Так как в номинальном режиме магнитная цепь двигателя насыщена (рис.3.32), то повышение напряжения сверх номинального приводит при прочих равных условиях к быстрому возрастанию тока намагничивания I. У двигателей нормального исполнения ток холостого хода I0I(0,250,35)·I1ном, поэтому повышение напряжения на 20-30% может увеличивать ток холостого хода до значений, превышающих номинальный ток I1ном, и двигатель может нагреваться этим током сверх допустимой температуры даже при отсутствии полезной нагрузки на его валу. При тех же условиях снижение напряжения вызывает в соответствии с (3.84) уменьшение магнитного потока.
Следовательно, напряжение, приложенное к обмоткам статора асинхронного двигателя, при f1=const может рассматриваться как управляющее воздействие, определяющее поток двигателя, так же как и напряжение Uв, приложенное к обмотке возбуждения двигателя постоянного тока. Форма механических характеристик при f1=const и U1=var показана на рис.3.31,в. Она определяется соотношениями (3.77) и (3.78), из которых следует, что скольжение sk при этом остается неизменным, а критический момент уменьшается пропорционально квадрату напряжения.
В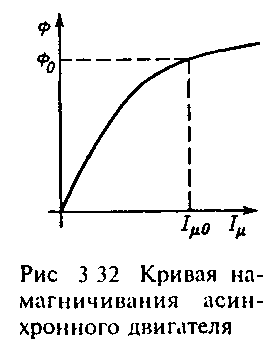 о
всех рассмотренных вариациях параметров
скорость идеального холостого двигателя
0
оставалась неизменной. Изменения частоты
тока статора/, приводят к пропорциональному
изменению величины 0=2··f1/pn,
но одновременно при U1=const
вызывают обратно пропорциональные
изменения потока двигателя Ф.
Так как в номинальном режиме машина
насыщена (рис.3.32), при U1=U1HOM
допустимо только увеличение частоты
f1f1ном,
что вызывает соответствующее уменьшение
потока Ф.
В соответствии с (3.78) увеличение f1
приводит к уменьшению критического
момента из-за увеличения 0
и повышения реактансов рассеяния
xк=хк(f1HOМ)f1/f1ном.
Критическое скольжение при этом также
уменьшается, а скорость идеального
холостого хода увеличивается, как
показано на рис.3.31,г.
о
всех рассмотренных вариациях параметров
скорость идеального холостого двигателя
0
оставалась неизменной. Изменения частоты
тока статора/, приводят к пропорциональному
изменению величины 0=2··f1/pn,
но одновременно при U1=const
вызывают обратно пропорциональные
изменения потока двигателя Ф.
Так как в номинальном режиме машина
насыщена (рис.3.32), при U1=U1HOM
допустимо только увеличение частоты
f1f1ном,
что вызывает соответствующее уменьшение
потока Ф.
В соответствии с (3.78) увеличение f1
приводит к уменьшению критического
момента из-за увеличения 0
и повышения реактансов рассеяния
xк=хк(f1HOМ)f1/f1ном.
Критическое скольжение при этом также
уменьшается, а скорость идеального
холостого хода увеличивается, как
показано на рис.3.31,г.
При необходимости уменьшения частоты f1<f1ном для снижения скорости 0<ном необходимо дополнительно изменять напряжение питания U1 таким образом, чтобы поток поддерживался примерно постоянным Соответственно наиболее эффективные возможности управления асинхронным двигателем обеспечиваются использованием в качестве управляющего воздействия в канале регулирования скорости частоты f1 а в канале регулирования потока напряжения U1.
Приведенный анализ основан на предположении, что при данной механической характеристике в любой ее точке параметры двигателя R1, R'2, x1, х'2 остаются неизменными. Известно, что это допущение вполне приемлемо в пределах рабочего участка механической характеристики, а при s>sk является в большинстве случаев грубым. При больших токах сказывается насыщение зубцов, что вызывает уменьшение индуктивного сопротивления рассеяния. С возрастанием частоты тока ротора существенно проявляется эффект вытеснения тока, вызывающий увеличение активного сопротивления роторной обмотки R'2. Для двигателя с фазным ротором, которым можно управлять таким образом, чтобы во всех режимах обеспечивалась работа в пределах рабочего участка его характеристик, указанные изменения параметров не имеют существенного значения. В наиболее массовом варианте асинхронного электропривода с короткозамкнутым ротором двигателя влияние изменений параметров весьма существенно и его необходимо иметь в виду.
Схема включения асинхронного короткозамкнутого двигателя приведена на рис.3.33,a, а варианты статических механических характеристик показаны на рис.3.33,б. В отличие от двигателя с фазным ротором пуск короткозамкнутого двигателя осуществляется в большинстве практических случаев прямым включением его обмотки статора в сеть, а для торможения используется режим противовключения Поэтому область механической характеристики при s>sК имеет для такого двигателя важное значение и определяет его пусковые и тормозные возможности. Момент Мп, развиваемый двигателем при =0 (s=1), является важным показателем, включаемым в число каталожных данных двигателя в виде величины Мп/Мном. Практически при оценке пускового момента следует учитывать возможность понижения напряжения сети на 10% при снижении каталожного значения Мп на 20%. Кроме того, для короткозамкнутых двигателей в каталогах указывается кратность пускового тока I1п/I1ном.
Для
сокращения длительности переходных
процессов пуска и торможения желательно
увеличивать пусковой и тормозной
моменты, а для уменьшения нагрузок на
сеть полезно ограничивать пусковые и
тормозные токи двигателя. Если двигатель
имеет ротор с круглыми пазами, то
изменения сопротивления роторной
обмотки, обусловленные эффектом
вытеснения тока, хотя и вызывают
отклонения формы механической
характеристики от определяемой (3.79), но
не обеспечивают значительного увеличения
пускового и тормозного моментов и
заметного ограничения соответствующих
токов (см. кривую 7 на рис.3.33,б). Изготовление
двигателя с увеличенным сопротивлением
роторной клетки дает модификацию,
называемую двигателем с повышенным
скольжением (штриховая кривая 2 на
рис.3.33,б). При этом достигается увеличение
пускового и тормозных моментов, но
понижается жесткость рабочего участка
механической характеристики, снижается
номинальная скорость и возрастают
потери в роторной цепи двигателя:![]()
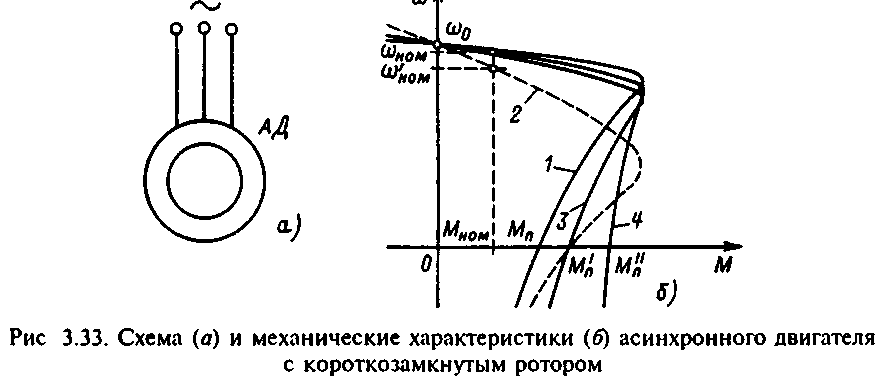
Соотношение (3.85) свидетельствует о том, что потери в роторной цепи при М=const пропорциональны скольжению. Двигатели с повышенным скольжением имеют номинальное скольжение shom=0,040,12, что в 2-3 раза превышает номинальное скольжение того же двигателя нормального исполнения. Соответственно возрастают номинальные потери двигателя, что вынуждает при прочих равных условиях снижать допустимый по нагреву (т.е. номинальный) момент и номинальную мощность двигателя. Увеличение потерь в роторной цепи вызывает также снижение КПД двигателя, поэтому обычно двигатели с повышенным скольжением в установках, работающих длительно с номинальной нагрузкой, не используются.
Более сильно зависит от скольжения активное сопротивление двигателей с глубоким пазом (кривая 3) и особенно с двойной беличьей клеткой (кривая 4 на рис.3.33,б). Сопротивление роторной обмотки таких двигателей в номинальном режиме невелико, но сильно увеличивается при возрастании частоты тока ротора в пусковых режимах и режиме противовключения. Подбором параметров двойной клетки удается обеспечить практическое постоянство момента двигателя в переходных процессах и в то же время обеспечить высокую жесткость рабочего участка механической характеристики и значения КПД, близкие к двигателям нормального исполнения. Кроме того, увеличение активного сопротивления двойной беличьей клетки при больших скольжениях ограничивает потребляемый двигателем ток.