

3.9. Особенности статических характеристик двигателя со смешанным возбуждением
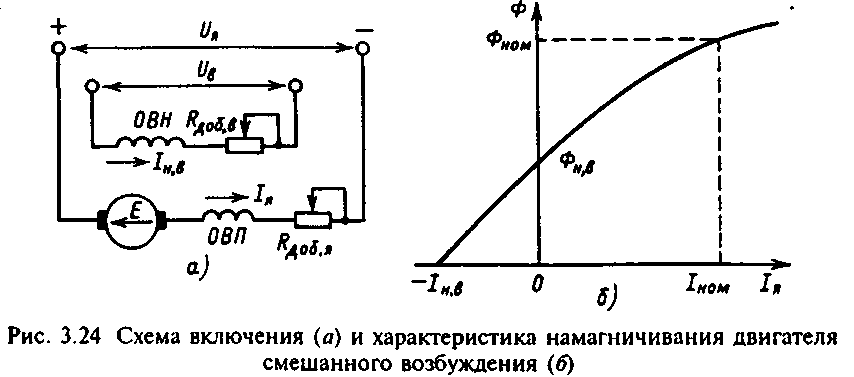
Двигатель со смешанным возбуждением имеет обмотки независимого ОВН и последовательного ОВП возбуждения и включается по схеме, приведенной на рис.3.24,а. Соответственно его магнитный поток определяется постоянной МДС обмотки независимого возбуждения и пропорциональной току якоря МДС обмотки последовательного возбуждения. Если осуществить приведение параметров обмотки независимого возбуждения к числу витков обмотки последовательного возбуждения п, характеристику намагничивания двигателя можно представить в функции тока якоря, как показано на рис.3.24,б.
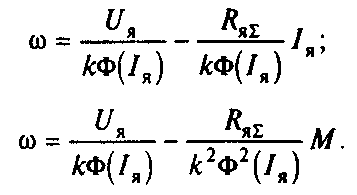
При токе якоря Iя=0 результирующая МДС определяется МДС обмотки независимого возбуждения Iн.вп. Вид механической характеристики двигателя существенно зависит от выбора значения этой МДС, так как соответствующее значение магнитного потока Фн в определяет скорость идеального холостого хода на естественной характеристике двигателя:
![]()
Чем больше значение Фнв, тем ближе по своим свойствам двигатель со смешанным возбуждением к свойствам двигателя с независимым возбуждением. Напротив, при небольшой МДС обмотки ОВН этот двигатель не имеет существенных отличий от двигателя с последовательным возбуждением. Как правило, обмотка независимого возбуждения двигателя со смешанным возбуждением рассчитывается на создание значительной МДС, обеспечивающей поток при идеальном холостом ходе: Фнв=(0,785)ФНОМ, при этом скорость идеального холостого хода лежит в пределах
![]()
Уравнения электромеханической и механической характеристик двигателя со смешанным возбуждением совпадают с соответствующими уравнениями для двигателя с последовательным возбуждением:
Ф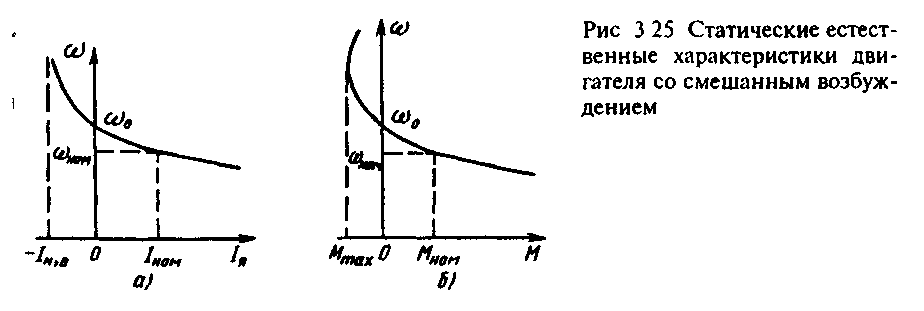 орма
статических характеристик (Iя)
и (М)
в этом случае определяется представленной
на рис.3.24,б кривой Ф(Iя).
Сравнивая эту кривую с представленной
на рис.3.2, можно установить, что добавление
МДС Iнвн
смещает кривую Ф(Iя)
по оси абсцисс на отрезок -Iнв.
Соответственно естественная
электромеханическая характеристика
двигателя со смешанным возбуждением
(рис.3.25,а) повторяет форму характеристики
двигателя с последовательным возбуждением,
если ось ординат сместить на значение
этого тока. При токе Iя=0
=0,
и при изменении нагрузки в двигательном
режиме от 0 до Мном
скорость изменяется в соответствии с
(3.63) в более щироких пределах, чем у
двигателя с независимым возбуждением.
При переводе двигателя в генераторный
режим изменение знака МДС обмотки
последовательного возбуждения приводит
к быстрому снижению потока (рис.3.24,б),
который при Iя=-Iнв
становится равным нулю. Этому значению
тока якоря соответствует асимптота, к
которой приближается кривая =f(Iя)
при .
орма
статических характеристик (Iя)
и (М)
в этом случае определяется представленной
на рис.3.24,б кривой Ф(Iя).
Сравнивая эту кривую с представленной
на рис.3.2, можно установить, что добавление
МДС Iнвн
смещает кривую Ф(Iя)
по оси абсцисс на отрезок -Iнв.
Соответственно естественная
электромеханическая характеристика
двигателя со смешанным возбуждением
(рис.3.25,а) повторяет форму характеристики
двигателя с последовательным возбуждением,
если ось ординат сместить на значение
этого тока. При токе Iя=0
=0,
и при изменении нагрузки в двигательном
режиме от 0 до Мном
скорость изменяется в соответствии с
(3.63) в более щироких пределах, чем у
двигателя с независимым возбуждением.
При переводе двигателя в генераторный
режим изменение знака МДС обмотки
последовательного возбуждения приводит
к быстрому снижению потока (рис.3.24,б),
который при Iя=-Iнв
становится равным нулю. Этому значению
тока якоря соответствует асимптота, к
которой приближается кривая =f(Iя)
при .
Естественная механическая характеристика (рис.3.25,б) по форме отличается от электромеханической характеристики. Так как при Iя-Iнв поток стремится к нулю, зависимость =f(М) в генераторном режиме имеет максимум и при возрастании скорости асимптотически приближается к оси ординат слева.
Эффективность режима рекуперативного торможения у двигателя со смешанным возбуждением из-за размагничивающего действия обмотки последовательного возбуждения существенно снижается.
Модуль жесткости механической характеристики с ростом нагрузки в этом режиме уменьшается до значения =0, соответствующего максимуму момента Мmах, а само значение этого момента невелико.
Более благоприятные условия рекуперативного торможения обеспечиваются путем отключения обмотки ОВП при переходе в генераторный режим, при этом в генераторном режиме механическая характеристика становится линейной и имеет жесткость
![]()
Таким образом, характеристики двигателя со смешанным возбуждением занимают промежуточное положение между характеристиками двигателей с независимым и с последовательным возбуждением.