

3.6. Математическое описание процессов электромеханического преобразования энергии в двигателе с последовательным возбуждением

Принципиальная схема включения двигателя постоянного тока с последовательным возбуждением, учитывающая возможное введение в его цепь якоря добавочного резистора Rдоб, представлена на рис.3.15,а. Соответствующая ей схема модели преобразователя может быть получена аналогично схеме модели преобразователя для двигателя с независимым возбуждением при включении обмотки возбуждения последовательно в цепь якоря (рис.3.15,б).
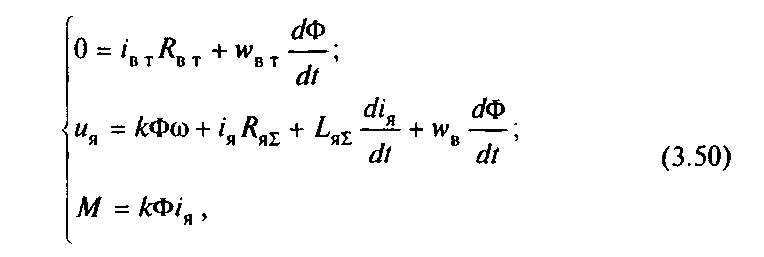
Включение обмотки возбуждения в силовую цепь, мощность которой на два порядка выше, чем мощность возбуждения, создает условия для форсированного изменения потока двигателя, при этом анализ динамических свойств электромеханического преобразователя без учета влияния вихревых токов, наводящихся в полюсах и станине при быстрых изменениях потока, приводит в большинстве случаев к значительным ошибкам. В первом приближении влияние вихревых токов может быть учтено добавлением короткозамкнутой обмотки на оси (5, показанной на рис.3.15,б, имеющей условное число витков bt, обтекаемой током iвт и связанной с потоком машины Ф по продольной оси (3 коэффициентом связи, равным единице. С учетом этой фиктивной обмотки математическое описание динамического процесса преобразования энергии в двигателе с последовательным возбуждением имеет следующий вид:
г![]() де
де
И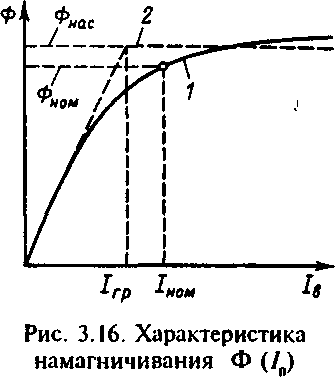 ндуктивность
рассеяния якорной цепи Lя
значительно меньше, чем индуктивность
обмотки возбуждения, связанной с главным
потоком двигателя, поэтому ею в ряде
случаев можно пренебречь. Однако такое
допущение вносит принципиальное
искажение в характер процессов, так как
при Lя=0
ток двигателя при изменениях скачком
приложенного напряжения приобретает
возможность изменяться скачком.
ндуктивность
рассеяния якорной цепи Lя
значительно меньше, чем индуктивность
обмотки возбуждения, связанной с главным
потоком двигателя, поэтому ею в ряде
случаев можно пренебречь. Однако такое
допущение вносит принципиальное
искажение в характер процессов, так как
при Lя=0
ток двигателя при изменениях скачком
приложенного напряжения приобретает
возможность изменяться скачком.
Положив для статического режима в (3.50) diя/dt=dФ/dt=0, получим iвт=0 и преобразуем эту систему в уравнения статических характеристик двигателя, по форме совпадающие с аналогичными для двигателя с независимым возбуждением:
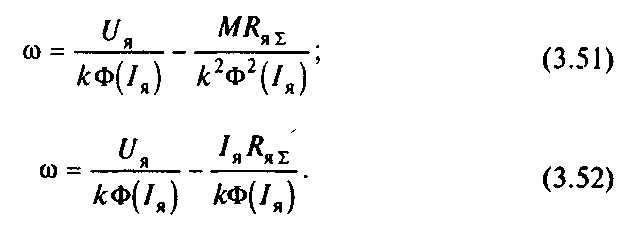
Очевидным отличием их является зависимость потока двигателя от тока якоря. Характеристика намагничивания Ф=f(Iя) показана на рис.3.16 (кривая 1) и свидетельствует о том, что магнитная цепь двигателя при номинальном токе якоря насыщена. В связи с этим в дальнейшем для анализа формы статических характеристик двигателя используется аппроксимация характеристики намагничивания двумя прямыми, как это выполнено на рис.3.16 (ломаная 2). При Iя<Iгр Ф=kф·Iя, а при Iя>Iгр магнитный поток машины принимается примерно постоянным: Ф=Фнас=const.
3.7. Статические характеристики двигателя с последовательным возбуждением
При принятой аппроксимации кривой намагничивания (рис.3.16) механическая и электромеханическая характеристики (3.51) и (3.52) при различных токах якоря имеют различные выражения. При Iя<Iгр kф=const и эти уравнения преобразуются к виду

При Iя>Iгр Ф=Фнас=const и те же уравнения записываются так:
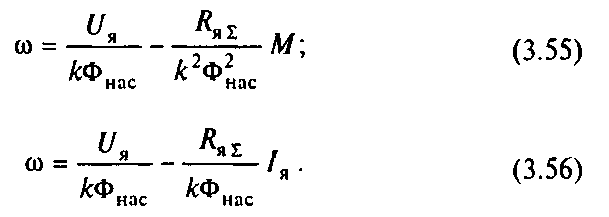
Уравнения (3.53) и (3.54) свидетельствуют о том, что в области нагрузок, меньших номинальной, статические характеристики двигателя с последовательным возбуждением имеют гиперболический характер и при М0 и Iя0 асимптотически приближаются к оси ординат. Эта форма характеристики определяется условиями электрического равновесия машины: при идеальном холостом ходе (IЯ=0) ЭДС двигателя должна уравновешивать приложенное к якорной цепи напряжение Uя. Так как при Iя0 поток Ф также стремится к нулю, выполнение условия
![]()
возможно только при неограниченном возрастании скорости. Реально скорость идеального холостого хода двигателя с последовательным возбуждением благодаря наличию остаточного потока Фост ограничена значением 0=UЯ/ФОСТ. Однако поток Фост мал, и значение 0 намного превышает допустимое для двигателя по условиям механической прочности. Поэтому при проектировании и эксплуатации электроприводов с двигателями последовательного возбуждения необходимо исключить возможность их работы с малыми нагрузками, при которых скорость двигателя может превысить допустимую по условиям механической прочности.
 При
Iя>Iгр
магнитная цепь машины
насыщается и при принятом допущении
Ф=Фнас=const.
В этой области характеристики двигателя
практически линейны, подобно аналогичным
характеристикам двигателя с независимым
возбуждением.
При
Iя>Iгр
магнитная цепь машины
насыщается и при принятом допущении
Ф=Фнас=const.
В этой области характеристики двигателя
практически линейны, подобно аналогичным
характеристикам двигателя с независимым
возбуждением.
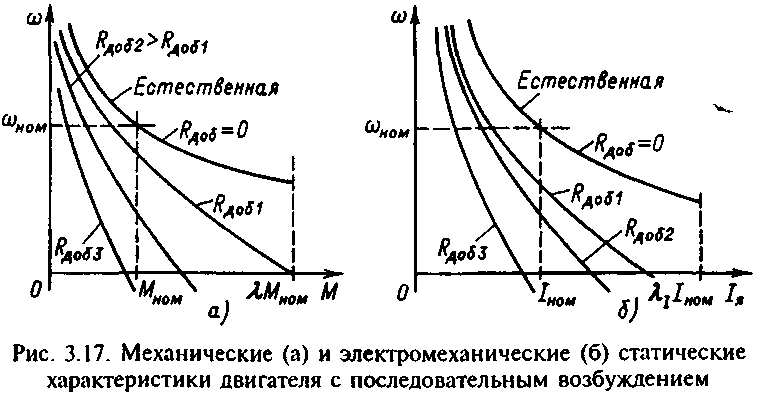
Естественные характеристики двигателя с последовательным возбуждением показаны на рис.3.17,a,б. Сильная положительная связь по току, создаваемая последовательной обмоткой двигателя, практически устраняет влияние размагничивающего действия реакции якоря и приводит в области допустимой перегрузки к возрастанию потока сверх номинального значения на 10-15%. Поэтому при том же коэффициенте допустимой перегрузки по току I=22,5 перегрузочная способность по моменту у двигателей с последовательным возбуждением выше, чем при независимом возбуждении, и лежит в пределах I=2,53.
Форма естественной механической характеристики определяет область применения двигателя с последовательным возбуждением. Он наиболее часто применяется в электроприводе механизмов, для которых желательно, чтобы по мере снижения нагрузки до минимальной, скорость движения возрастала в 1,5-2 раза, обеспечивая соответствующее повышение производительности при данной мощности двигателя. При этом важным достоинством двигателя является повышенная перегрузочная способность.
В связи с нелинейностью кривой намагничивания рассчитать естественные характеристики двигателя с последовательным возбуждением только по его номинальным данным не представляется возможным. Поэтому в каталогах приводятся естественные характеристики =f(Iя) и М=f(Iя), которые и следует использовать при проектировании электроприводов с двигателями последовательного и смешанного возбуждения. Для ориентировочных или учебных расчетов можно пользоваться универсальными характеристиками, приведенными в примере 3.4.
Статическая жесткость механической характеристики двигателя с последовательным возбуждением зависит от нагрузки. При малых нагрузках двигатель имеет мягкую характеристику, с возрастанием нагрузки модуль жесткости увеличивается и при М>Мном стремится к постоянному значению, которое определяется (3.55):
![]()
Соответственно введение добавочных сопротивлений уменьшает жесткость механических характеристик. Реостатные механические и электромеханические характеристики показаны на рис.3.17,а,б вместе с естественными характеристиками, соответствующими Rдоб=0. Рассматривая этот рисунок, можно установить, что введение сопротивлений в цепь якоря позволяет ограничивать момент и ток короткого замыкания двигателя.
Статические характеристики двигателя, соответствующие различным значениям напряжения питания, приведены на рис.3.18. Их вид свидетельствует о том, что уменьшение напряжения приводит к снижению скорости при данной нагрузке без изменения соответствующей этой нагрузке жесткости механической характеристики.
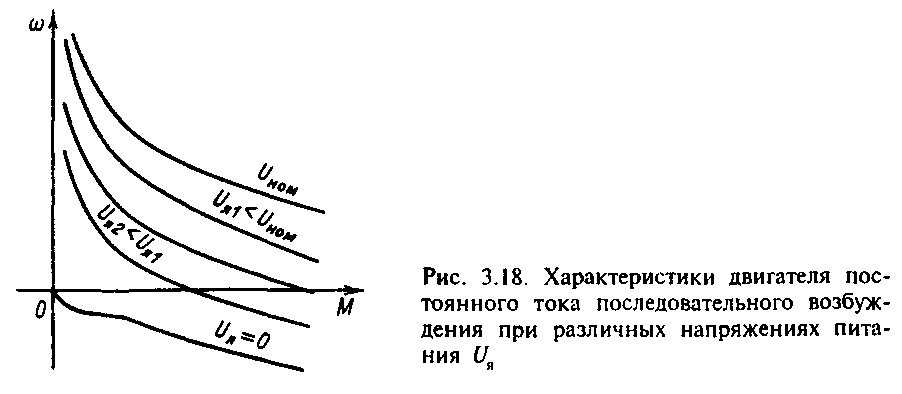
М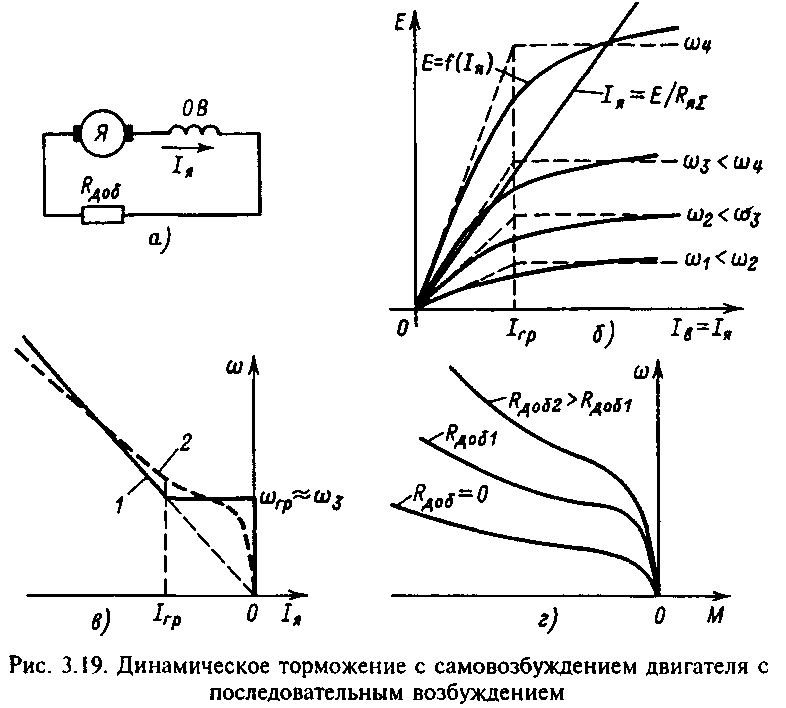 еханическая
характеристика при Uя=0
соответствует режиму динамического
торможения двигателя при замкнутой
накоротко его якорной цепи. В данном
случае торможение протекает при
самовозбуждении, поэтому его особенности
заслуживают дополнительного рассмотрения.
еханическая
характеристика при Uя=0
соответствует режиму динамического
торможения двигателя при замкнутой
накоротко его якорной цепи. В данном
случае торможение протекает при
самовозбуждении, поэтому его особенности
заслуживают дополнительного рассмотрения.
В общем случае при питании двигателя от сети с постоянным напряжением Uя=UHOM для осуществления режима динамического торможения его якорная цепь отключается от сети и замыкается на внешний резистор Rдоб (рис.3.19,а), Если с помощью внешнего источника механической энергии (например, при наличии движущей активной нагрузки) привести якорь двигателя во вращение, то при выполнении определенных условий двигатель самовозбуждается и развивает зависящий от скорости тормозной момент.
Первым условием самовозбуждения является наличие остаточного потока такого знака, чтобы при данном направлении вращения ЭДС, наводимая остаточным потоком, вызвала ток возбуждения, увеличивающий поток двигателя. Если двигатель работал в двигательном режиме при >0, то его ЭДС в режиме торможения при >0 создает ток, направленный противоположно току якоря в предшествующем режиме. Этот ток, протекая по обмотке возбуждения, создает МДС, уменьшающую поток остаточного намагничивания, и самовозбуждение исключается. Если при этом изменить направление вращения (<0), двигатель самовозбудится, поэтому характеристика на рис.3.18 при Uя=0 существует только в четвертом квадранте. Обеспечить торможение во втором квадранте можно, переключив либо выводы якоря, либо выводы обмотки возбуждения.
Второе условие самовозбуждения поясняет рис.3.19,б. Здесь приведен ряд зависимостей E(Iя), соответствующих различной скорости движения якоря. Если воспользоваться кусочно-линейной аппроксимацией кривой намагничивания, показанной на рис.3.16, зависимости Е(IЯ) приближенно линеаризуются, причем при Iя>Iгр ЭДС принимается приближенно постоянной. На рис.3.19,б показана также прямая Iя=f(E)=Е/Rя Известно, что при самовозбуждении E(Iя)=Iя(E), и второе условие самовозбуждения графически выражается наличием точки пересечения этих характеристик. Это условие на рис.3.19,б выполняется только при >2, причем граничное значение скорости гр3. Таким образом, самовозбуждение может наступить только после достижения скорости гр при которой наклон линейной части характеристики Е(Iя) совпадает с наклоном прямой Iя=Е/RЯ Следовательно, при увеличении суммарного сопротивления цепи якоря самовозбуждение наступает при более высоких скоростях гр.
Изложенные соображения позволяют установить форму характеристики динамического торможения с самовозбуждением, показанную на рис.3.19,в. При <гр самовозбуждение отсутствует и IЯ0. При =гр двигатель самовозбуждается, ток якоря при принятой аппроксимации возрастает до Iя=Iгр и при дальнейшем увеличении скорости двигатель имеет линейную характеристику (Iя), соответствующую Ф=Фнас=const. Поэтому при принятой идеализации электромеханическая характеристика при динамическом торможении с самовозбуждением имеет вид ломаной 1 на рис.3.19,в.
В связи с наличием остаточного потока Фост ток при <гр несколько возрастает, а реальная форма кривой намагничивания приводит к дополнительным отклонениям фактической кривой (Iя) (кривая 2 на рис.3.19,в) от приближенной кривой 1. Форма механической характеристики в этом режиме аналогична форме электромеханической характеристики 2. В этом можно убедиться, рассмотрев приведенные на рис 3.19,г механические характеристики динамического торможения с самовозбуждением при различных добавочных сопротивлениях в цепи якоря.