3.2. Математическое описание процессов преобразования энергии в двигателе постоянного тока с независимым возбуждением
Двигатель постоянного тока с независимым возбуждением имеет обмотку якоря и обмотку возбуждения, которые в общем случае получают питание от независимых источников постоянного тока. Необходимым условием непрерывного процесса электромеханического преобразования энергии является протекание переменных токов хотя бы по части обмоток машины. Выполнение этого условия в машине постоянного тока обеспечивается работой коллектора, коммутирующего постоянный ток, поступающий в якорную обмотку со стороны источника питания, с частотой эл, равной электрической скорости ротора. Таким образом, с точки зрения внутренних процессов двигатель постоянного тока является машиной переменного тока и уравнения, описывающие его механическую характеристику, являются частным случаем обобщенного математического описания процессов электромеханического преобразования энергии, полученного в гл. 2.
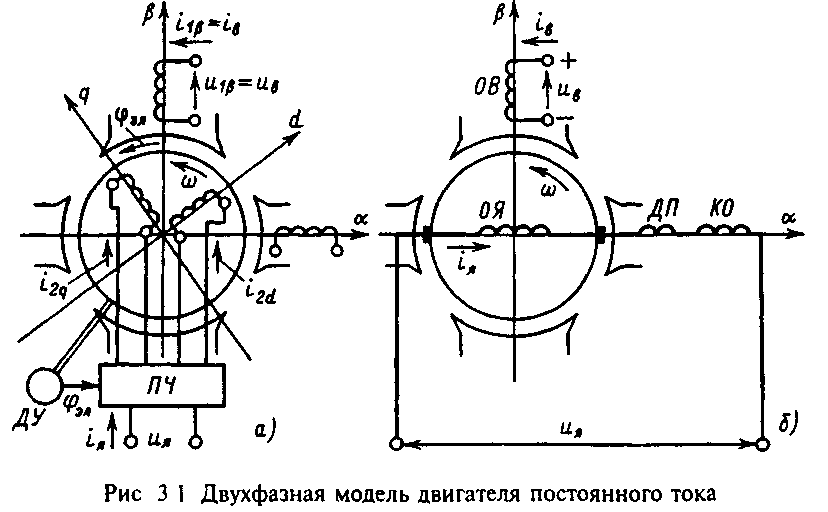
Модели двигателя постоянного тока соответствует включение обмоток двухфазной обобщенной машины по схеме, показанной на рис.3.1,а. Здесь обмотка статора по оси включена на постоянное напряжение uв, а обмотка по оси пока не используется. Обмотки фаз 2d и 2q ротора питаются переменными токами i2d и i2q от преобразователя частоты ПЧ, осуществляющего коммутацию токов i2d и i2q в функции угла поворота ротора фэл с частотой эл. Если в качестве ПЧ используется механический коммутатор - коллектор машины, то схема на рис.3.1,а представляет собой модель двигателя постоянного тока. В случае когда в качестве ПЧ используется вентильный преобразователь частоты, коммутируемый датчиком углового положения ротора ДУ, эта же схема является схемой модели вентильного двигателя. Поэтому анализ электромеханических свойств двигателей постояннного тока в пределах допущений, лежащих в основе общей модели, справедлив и для вентильного двигателя на базе синхронной машины, получающего питание от мощной сети постоянного тока. В рассматриваемой модели МДС статора создается постоянным током возбуждения iв=i поэтому она ориентирована по оси и неподвижна в пространстве. Соответственно и МДС ротора при вращении ротора со скоростью должна быть неподвижна относительно статора, а это возможно при условии, что МДС ротора вращается относительно ротора против его вращения со скоростью - . Для выполнения данного условия необходимо, чтобы обмотки фаз ротора обтекались переменными токами i2d и i2q , изменяющимися с частотой эл по закону
![]()
Магнитодвижущая сила ротора в этом случае будет вращаться относительно ротора со скоростью - в соответствии с выбранным чередованием фаз, оставаясь неподвижной относительно статора.
Так как поле неподвижно относительно статора, для получения математического описания динамических процессов преобразования энергии в двигателе постоянного тока целесообразно использовать преобразование , , d, q , (к=0). Осуществим с помощью формул (2.16) преобразование токов i2d и i2q к осям , :

Следовательно, в осях а, 3 действительным переменным токам обмотки ротора эквивалентна одна якорная обмотка, обтекаемая постоянным током iя и создающая поле, неподвижное в пространстве и направленное по оси а, совпадающей с осью щеток двигателя. В реальной машине по оси щеток направлены также МДС обмоток дополнительных полюсов ДП и компенсационной обмотки КО, с учетом которых схема модели двигателя постоянного тока с независимым возбуждением в осях , представлена на рис.3.1,б.
Для получения уравнений динамической механической характеристики двигателя постоянного тока можно непосредственно воспользоваться преобразованными уравнениями обобщенной машины в осях , :
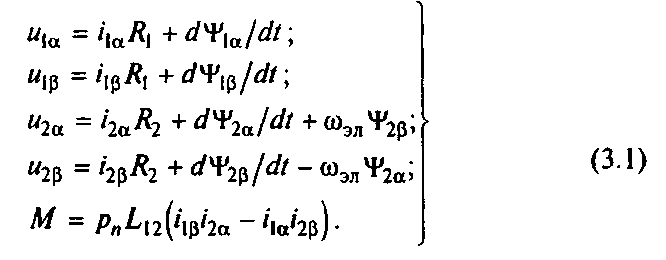
В соответствии с рис.3.1,б в (3.1) можно принять
![]()
Показанные на рис.3.1,б обмотки машины, расположенные на статоре по оси а, непосредственно в процессе электромеханического преобразования энергии не участвуют. Обмотка ДП обтекается током якоря и обеспечивает вблизи оси щеток , т. е. в зоне, где осуществляется коммутация тока в проводниках обмотки якоря, магнитное поле такого направления и значения, при котором процессы коммутации протекают наиболее благоприятно. Компенсационная обмотка КО является распределенной обмоткой, закладываемой в пазы на главных полюсах аналогично якорной обмотке. Вследствие протекания по ней тока якорной цепи она создает МДС, компенсирующую МДС реакции якоря по поперечной оси . В машинах без компенсационной обмотки эта реакция якоря искажает форму поля под главными полюсами и в связи с насыщением магнитопровода создает размагничивающую продольную составляющую. Благодаря действию КО влияние поперечной реакции якоря на поле главных полюсов существенно уменьшается. С учетом сказанного можно выразить потокосцепление обмоток через токи:
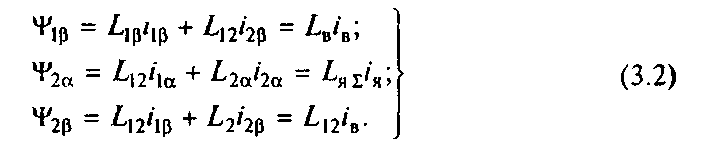
Здесь L - полная индуктивность обмотки возбуждения, а Lя - суммарная индуктивность рассеяния обмоток ЯО, ДП и КО, так как основная МДС обмотки ЯО по оси а компенсируется МДС компенсационной обмотки. Соответственно сопротивление Rя включает в себя все сопротивления обмоток якорной цепи двигателя. С учетом введенных обозначений и (3.2) система уравнений (3.1) запишется в виде

Нетрудно видеть, что первые два уравнения полученной системы представляют собой уравнения Кирхгофа для цепей возбуждения и якоря машины, причем последний член уравнения для цепи якоря есть ЭДС двигателя:
![]()
где k=pп·N/2··a - конструктивный коэффициент; N - число активных проводников; а - число параллельных ветвей якорной обмотки.
Момент в (3.3) с учетом (3.4) определяется соотношением
![]()
Следовательно, для записи уравнений механической характеристики двигателя постоянного тока можно, как это принято, непосредственно использовать схему его цепей на постоянном токе, приведенную на рис.3.2. На этой схеме и в дальнейшем изложении вспомогательные обмотки ДП и КО не показываются, а их сопротивления и индуктивности рассеяния учитываются в Rя и Lя Получение уравнений (3.3) из уравнений обобщенной машины, выполненное здесь, имеет целью показать универсальные возможности методики описания динамических процессов преобразования энергии, изложенной в гл. 2.
С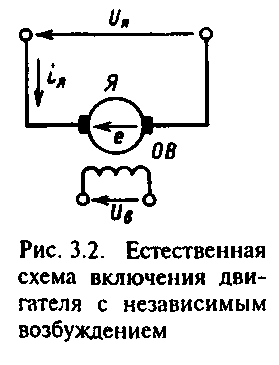 учетом (3.4) и (3.5) систему (3.3) можно
представить в виде
учетом (3.4) и (3.5) систему (3.3) можно
представить в виде
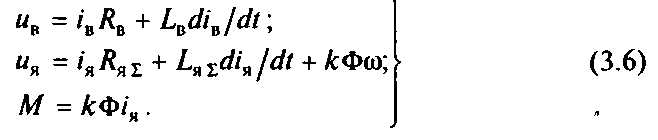
Математическое описание механической характеристики двигателя постоянного тока (3.6) при переменном потоке нелинейно в связи с тем, что ЭДС двигателя е и электромагнитный момент М пропорциональны произведениям потока соответственно на скорость и ток якоря. Во многих случаях двигатель с независимым возбуждением работает при постоянном потоке Ф=const, при этом уравнения механической характеристики линеаризуются и после преобразований математическое описание динамических процессов преобразования энергии в двигателе с независимым возбуждением представляется в виде следующего уравнения механической характеристики:

Подстановка М=kФIЯ в (3.7) дает уравнение электромеханической характеристики:
![]()
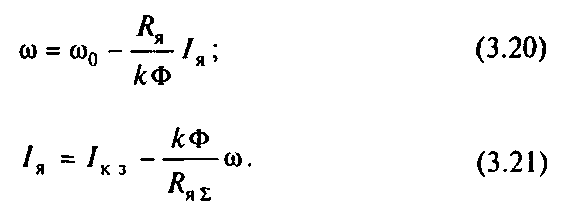
Как частный результат полученного математического описания могут быть определены уравнения статических электромеханической и механической характеристик двигателя. При постоянном потоке уравнения этих характеристик с помощью (3.7) и (3.8) при dM/dt=di/dt=0 записываются в виде
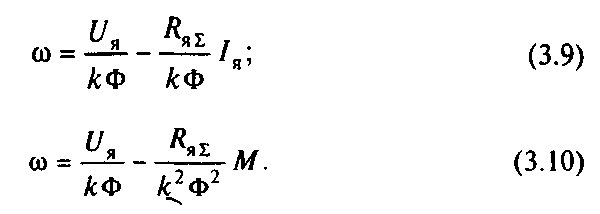
Рассматривая полученные уравнения, можно заключить, что при Ф=const электромеханическая и механическая характеристики двигателя с независимым возбуждением линейны. Поэтому положение каждой характеристики может быть охарактеризовано двумя точками: точкой идеального холостого хода, в которой I=0; М=0, и точкой короткого замыкания, в которой =0. В соответствии с (3.9) и (3.10) первой из них соответствует скорость идеального холостого хода:
![]()
Второй соответствуют момент Мкз и ток Iкз короткого замыкания. Их можно определить, решив (3.9) и (3.10) относительно тока и момента:
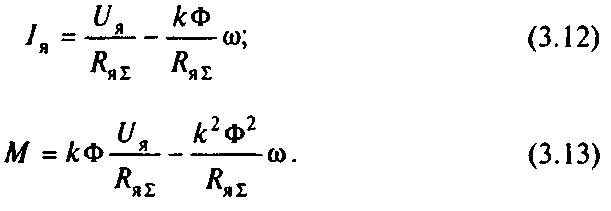
Положим в этих уравнениях =0, получим

Важным показателем электромеханических свойств двигателя является модуль статической жесткости механической характеристики ст. Зависимость ст от параметров двигателя получим, продифференцировав в соответствии с (2.48) уравнение (3.13) по скорости:
![]()
Следовательно, модуль статической жесткости определяется соотношением
![]()
С помощью (3.11) и (3.16) уравнение статической механической характеристики двигателя с независимым возбуждением может быть записано в следующих
формах:
![]()
где Мкз=·0.
Уравнение электромеханической характеристики с учетом (3.11) и (3.14) может иметь следующие формы записи: