10. Понятие базис.Разложение вектора по базису.
Определение. Базисом
в пространстве Rn называется
любая система из n-линейно
независимых векторов. Каждый вектор из
Rn,
не входящих в базис, можно представить
в виде линейной комбинации базисных
векторов, т.е. разложить по базису.
Пусть ![]() –
базис пространства Rn и
–
базис пространства Rn и ![]() .
Тогда найдутся такие числа λ1,
λ2,
…, λn,
что
.
Тогда найдутся такие числа λ1,
λ2,
…, λn,
что ![]() .
Коэффициенты разложения λ1,
λ2,
…, λn,
называются координатами вектора
.
Коэффициенты разложения λ1,
λ2,
…, λn,
называются координатами вектора ![]() в
базисе В. Если задан базис, то коэффициенты
вектора определяются
однозначно.
Пример. Доказать,
что векторы
в
базисе В. Если задан базис, то коэффициенты
вектора определяются
однозначно.
Пример. Доказать,
что векторы ![]() образуют
базис в R3.
Решение. Покажем, что равенство
образуют
базис в R3.
Решение. Покажем, что равенство ![]() возможно
только при λ1 =
λ2 =
λ3 =0:
возможно
только при λ1 =
λ2 =
λ3 =0:
![]() или
или  Решив систему, получим λ1=0,
λ2=0,
λ3=0.
Так как все λi=0
(i=1,2,3),
то
Решив систему, получим λ1=0,
λ2=0,
λ3=0.
Так как все λi=0
(i=1,2,3),
то ![]() -
линейно независимы. Они могут составить
базис в R3.
Очевидно, любой новый набор из
векторов
-
линейно независимы. Они могут составить
базис в R3.
Очевидно, любой новый набор из
векторов ![]()
![]()
![]() может
тоже быть взятым в качестве базиса в
R3.
Итак, базис может быть выбран неединственным
образом.
Пример. Разложить
вектор
может
тоже быть взятым в качестве базиса в
R3.
Итак, базис может быть выбран неединственным
образом.
Пример. Разложить
вектор ![]() по
базису
по
базису ![]() .
Решение.
.
Решение. ![]() .
Подставим координаты всех векторов и
выполним действия над ними:
.
Подставим координаты всех векторов и
выполним действия над ними:
![]() Приравняв координаты, получим систему
уравнений:
Приравняв координаты, получим систему
уравнений:
 Решим ее:
Решим ее: ![]() .
Таким образом, получим разложение:
.
Таким образом, получим разложение: ![]() .
В базисе
.
В базисе ![]() вектор
имеет
координаты
вектор
имеет
координаты ![]() .
Замечание. В каждом n-мерном
векторном пространстве можно выбрать
бесчисленное множество различных
базисов. В различных базисах один и тот
же вектор имеет различные координаты,
но единственные в выбранном базисе.
.
Замечание. В каждом n-мерном
векторном пространстве можно выбрать
бесчисленное множество различных
базисов. В различных базисах один и тот
же вектор имеет различные координаты,
но единственные в выбранном базисе.
11.Декартовая система координат. Направление косинуса вектора.
Системой координат называется совокупность одной, двух, трех или более пересекающихся координатных осей, точки, в которой эти оси пересекаются, – начала координат– и единичных отрезков на каждой из осей. Каждая точка в системе координат определяется упорядоченным набором нескольких чисел – координат. В конкретной невырожденной координатной системе каждой точке соответствует один и только один набор координат.
Если в качестве координатных осей берутся прямые, перпендикулярные друг другу, то система координат называется прямоугольной (или ортогональной). Прямоугольная система координат, в которой единицы измерения по всем осям равны друг другу, называется ортонормированной (декартовой) системой координат (в честь французского математика Рене Декарта).
|
|
График 1.2.1.1. Декартова система координат |
В элементарной математике чаще всего рассматривается двухмерная или трехмерная декартова система координат; координаты обычно обозначаются латинскими буквами x, y,z и называются, соответственно, абсциссой, ординатой и аппликатой. Координатная ось OX называется осью абсцисс, ось OY – осью ординат, ось OZ – осью аппликат. Положительные направления отсчета по каждой из осей обозначаются стрелками.
|
|
График 1.2.1.2. Координаты точки в декартовой системе координат. Важно отметить, что порядок записи координат существенен; так, например, точки A (–3; 2) и B (2; –3) – это две совершенно различные точки |
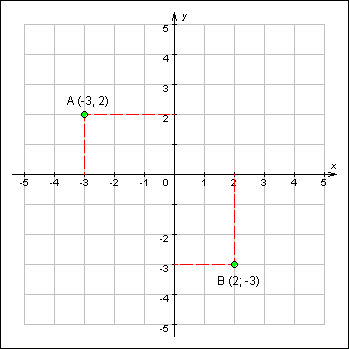
Как определить координаты точки в декартовой системе координат? Проведем через точку A прямые (в трехмерном случае – плоскости), перпендикулярные осям. Расстояния от точек пересечения построенных прямых (плоскостей) с осями абсцисс, ординат (аппликат) до начала координат, взятые со знаком «+», если точки лежат на положительных полуосях, и со знаком «–», если они лежат на отрицательных полуосях, и будут координатами точки A. Координаты точки записываются в скобках: например, A (–3; 2) илиB (x0; y0). В трехмерном пространстве координаты точки в декартовой системе координат записываются тремя числами, например, C (5; 0,2; –6).
|
Рисунок 1.2.1.1. Координатные оси делят координатную плоскость на четыре квадранта (четверти). Точки, лежащие на осях координат, не принадлежат ни одному квадранту |
В двухмерной системе координат все точки, лежащие над (под) осью OX, образуют верхнюю (нижнюю) координатную полуплоскость. Все точки, лежащие правее (левее) осиOY образуют правую (левую) координатную полуплоскость.
![]()
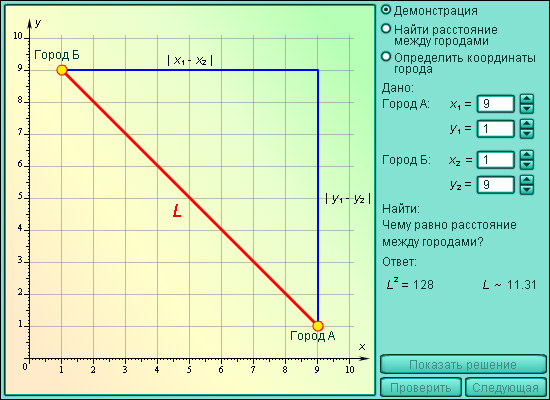
|
Модель 1.5. Расстояние между городами |
В конце этого параграфа приведем некоторые очевидные формулы.
Расстояние от точки A (x0; y0) до оси OX равно |y0|.
Расстояние от точки A (x0; y0) до оси OY равно |x0|.
Расстояние от точки
 до
начала координат равно
до
начала координат равно 
Расстояние |AB| между точками A (x1; y1) и B (x2; y2) равно
Точка M, которая является серединой отрезка AB, где A (x1; y1) и B (x2; y2), имеет координаты
|
|
График 1.2.1.3. Координаты середины отрезка |

На случай трехмерного пространства эти формулы обобщаются следующим образом:
Расстояние от точки A (x; y; z) до плоскости OYZ равно |x|.
Расстояние от точки A (x; y; z) до начала координат равно

Расстояние |AB| между точками A (x1; y1; z1) и B (x2; y2; z2) равно
Координаты точки M, которая является серединой отрезка AB, где A (x1; y1; z1) и B (x2; y2; z2) равны