

Классификация кривых второго порядка[править | править исходный текст] Невырожденные кривые[править | править исходный текст]
Кривая
второго порядка называется невырожденной,
если ![]() Могут
возникать следующие варианты:
Могут
возникать следующие варианты:
Невырожденная кривая второго порядка называется центральной, если

эллипс — при условии
 и
и  ;
;частный случай эллипса — окружность — при условии
 или
или 
мнимый эллипс (ни одной вещественной точки) — при условии

гипербола — при условии

Невырожденная кривая второго порядка называется нецентральной, если

парабола — при условии

Вырожденные кривые[править | править исходный текст]
Кривая
второго порядка называется вырожденной,
если ![]() .
Могут возникать следующие варианты:
.
Могут возникать следующие варианты:
вещественная точка на пересечении двух мнимых прямых (вырожденный эллипс) — при условии

пара вещественных пересекающихся прямых (вырожденная гипербола) — при условии
вырожденная парабола — при условии

пара вещественных параллельных прямых — при условии

одна вещественная прямая (две слившиеся параллельные прямые) — при условии

пара мнимых параллельных прямых (ни одной вещественной точки) — при условии

23. Преобразование координат на плоскости. Приведение общего уравнения кривой второго порядка у каноническому виду Преобразование декартовых прямоугольных координат на плоскости
Параллельный сдвиг координатных осей (рис. 4.8)
![]()
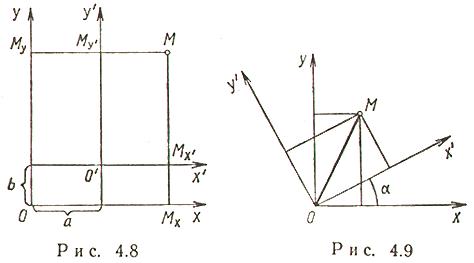
Поворот координатных осей (рис. 4.9)
![]()
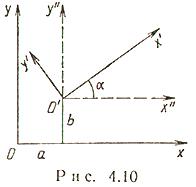
Параллельный сдвиг и поворот координат осей (рис. 4.10)
![]()
Пусть
в прямоугольной системе
координат ![]() алгебраическая
линия второго порядка задана уравнением
(3.34):
алгебраическая
линия второго порядка задана уравнением
(3.34):
Чтобы привести уравнение к каноническому виду, нужно выполнить следующие действия.
1. Если
в уравнении имеется член с произведением
неизвестных ![]() ,
то делаем поворот системы координат:
,
то делаем поворот системы координат:
на
угол ![]() ,
удовлетворяющий равенству
,
удовлетворяющий равенству ![]() .
При этом получим "почти" приведенное
уравнение линии второго порядка:
.
При этом получим "почти" приведенное
уравнение линии второго порядка:
![]()
Если ![]() ,
переходим к пункту 2, поворот системы
координат делать не нужно, так как
исходное уравнение имеет "почти"
приведенный вид.
,
переходим к пункту 2, поворот системы
координат делать не нужно, так как
исходное уравнение имеет "почти"
приведенный вид.
2. Выполняем параллельный перенос системы координат:
а) если в уравнении нет линейных членов, то переходим к пункту 3;
б)
если в уравнении имеется линейный член
с какой-либо неизвестной и квадратичный
член с этой же неизвестной, то, дополняя
эти члены до полного квадрата, делаем
замену, чтобы в уравнении не стало
линейного члена с этой неизвестной.
Например, если в уравнении ![]() и
и ![]() ,то
выполняем преобразования:
,то
выполняем преобразования:
а
затем замену неизвестных ![]() ,
после которой в уравнении не будет
линейного члена с неизвестной
,
после которой в уравнении не будет
линейного члена с неизвестной ![]() ;
;
в) если в уравнении имеется только один линейный член с какой-либо неизвестной, а квадрат этой неизвестной отсутствует, то при помощи замены этой переменной надо сделать равным нулю свободный член уравнения. Например, если уравнение имеет вид
![]()
то,
выполняя замену неизвестных ![]() ,
получаем уравнение без свободного
члена:
,
получаем уравнение без свободного
члена:
![]()
3. Полученное в результате упрощений (пункт 2) уравнение имеет "почти" канонический вид. Для окончательного упрощения "почти" канонического уравнения при необходимости применяются следующие преобразования:
а)
переименование координатных осей: ![]() ;
;
б)
изменение направления координатной
оси, например оси абсцисс: ![]() ;
;
в) умножение обеих частей уравнения на отличный от нуля множитель;
г) перенос членов из одной части уравнения в другую.
В результате этих преобразований уравнение приводится к каноническому виду. Замену неизвестных, приводящую уравнение поверхности к каноническому виду, определяем как композицию всех замен, применяемых в ходе решения.
Пример 3.19. В прямоугольной системе координат заданы уравнения алгебраических линий второго порядка:
а) ![]() ;
;
б) ![]() ;
;
в) ![]() ;
;
г) ![]() .
.
Каждое уравнение привести к каноническому виду. Указать связь между исходной и канонической системами координат.
Решение.
а) Сравнивая заданное уравнение с общим уравнением (3.34), находим коэффициенты
![]()
1. Поскольку , поворот системы координат делать не нужно.
2. В уравнении имеются квадраты обеих неизвестных. Преобразуем левую часть заданного уравнения, выделяя полные квадраты:
![]()
Следовательно,
уравнение можно записать в виде ![]() .
Делая замену
.
Делая замену  или,
выражая старые координаты через
новые:
или,
выражая старые координаты через
новые:  ,
получаем
,
получаем ![]() —
каноническое уравнение пары пересекающихся
прямых (см. уравнение (5) в теореме 3.3
при
—
каноническое уравнение пары пересекающихся
прямых (см. уравнение (5) в теореме 3.3
при ![]() ).
В данном случае пункта 3 алгоритма не
выполняется.
).
В данном случае пункта 3 алгоритма не
выполняется.
б) Сравнивая заданное уравнение с общим уравнением (3.34), находим коэффициенты
![]()
1.
Поскольку в заданном уравнении нет
произведения неизвестных ![]() ,
то уравнение имеет "почти"
приведенный вид.
,
то уравнение имеет "почти"
приведенный вид.
2.
Выделяя полный квадрат по неизвестной ![]() ,
получаем
,
получаем
![]()
Делая
замену  или,
выражая старые координаты через
новые:
или,
выражая старые координаты через
новые:  получаем
получаем ![]() —
каноническое уравнение параболы (см.
уравнение (6) в теореме 3.3 при
—
каноническое уравнение параболы (см.
уравнение (6) в теореме 3.3 при ![]() ).
).
в) Сравнивая заданное уравнение с общим уравнением (3.34), находим коэффициенты
![]()
1.
В заданном уравнении имеется произведение
неизвестных ![]() ,
поэтому необходимо сделать поворот
системы координат. Величину
,
поэтому необходимо сделать поворот
системы координат. Величину ![]() угла
поворота находим по формуле (3.40):
угла
поворота находим по формуле (3.40):
![]()
то
есть ![]() ,
учитывая ограничение
,
учитывая ограничение ![]() .
При повороте системы координат на
угол
старые
координаты выражаются через новые по
формулам (3.35):
.
При повороте системы координат на
угол
старые
координаты выражаются через новые по
формулам (3.35):
Подставляя их в левую часть заданного уравнения, получаем
Раскрываем скобки и приводим подобные члены:
2. Так как линейные члены отсутствуют, то параллельный перенос системы координат делать не нужно.
3. Переносим свободный член в правую часть и делим обе части уравнения на (-8):
![]()
Осталось
поменять названия координатных осей,
т.е. сделать замену  после
которой получаем
после
которой получаем ![]() —
каноническое уравнение гиперболы (см.
уравнение (4) в теореме 3.3 при
—
каноническое уравнение гиперболы (см.
уравнение (4) в теореме 3.3 при ![]() ).
Найдем формулы перехода от исходной
системы координат
к
канонической
).
Найдем формулы перехода от исходной
системы координат
к
канонической ![]() .
Подставляя
в
формулы поворота на угол
,
получаем
.
Подставляя
в
формулы поворота на угол
,
получаем
г) Сравнивая заданное уравнение с общим уравнением (3.34), находим коэффициенты
![]()
1.
В заданном уравнении имеется произведение
неизвестных ![]() ,
поэтому необходимо сделать поворот
системы координат. Величину
угла
поворота находим по формуле (3.40):
,
поэтому необходимо сделать поворот
системы координат. Величину
угла
поворота находим по формуле (3.40):
Так
как ![]() ,
то из уравнения
,
то из уравнения ![]() находим
тангенс искомого угла:
находим
тангенс искомого угла:
или ![]()
Ограничению
удовлетворяет
острый угол ![]() .
Вычисляем
.
Вычисляем  и
и ![]() и
делаем замену:
и
делаем замену:
соответствующую повороту (3.35) на угол . Получаем уравнение
Раскрываем скобки и приводим подобные члены:
Получили приведенное уравнение (III).
2. "Уничтожаем" линейные члены, выделяя полные квадраты:
![]()
После
замены  или,
выражая старые координаты через
новые:
или,
выражая старые координаты через
новые:  получаем
получаем ![]() .
.
3. Переносим свободный член в правую часть и делим обе части уравнения на 100:
![]()
Это
уравнение похоже на каноническое
уравнение эллипса (см. уравнение (1) в
теореме 3.3 при ![]() и
и ![]() ).
Однако, его коэффициенты не удовлетворяют
неравенству
).
Однако, его коэффициенты не удовлетворяют
неравенству ![]() .
Поэтому необходимо переименовать
координатные оси, т.е. сделать
замену
.
Поэтому необходимо переименовать
координатные оси, т.е. сделать
замену  после
которой получаем каноническое уравнение
эллипса
после
которой получаем каноническое уравнение
эллипса ![]() .
.
Формулы перехода от исходной системы координат к канонической получаем как композицию преобразований прямоугольных координат,
выражения
параллельного переноса
а
затем — отражения  Первая
подстановка дает:
Первая
подстановка дает:
вторая подстановка дает искомую связь