

1.1.1.5 Динамические механические характеристики электропривода
Динамические механические характеристики электропривода выражают собой зависимости координат механической части электропривода от времени, а именно М, МС, МД=f(t), а также угловой скорости от времени ω=f(t).
Представим семейства динамических характеристик для следующих примеров:
1. К единичному элементу, находящемуся в неподвижном состоянии (то есть ω=0) одновременно приложены два момента:
Вращающий электромагнитный момент М=f(ω);
Статический момент МС=f(ω).
При этом если представить зеркальное отображение статического момента МС в первом квадранте координатной плоскости, то зависимость динамического момента МД=f(ω) будет иметь вид, представленный на рисунке 1.8 (заштрихованная часть).
П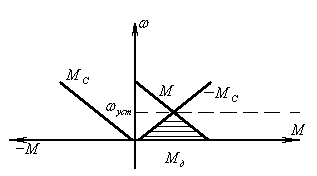 ри
этом по мере увеличения угловой скорости
вращения ω,
динамический момент МД
будет уменьшаться и при некоторой
скорости ω=ωУСТ,
динамический момент станет равным нулю.
ри
этом по мере увеличения угловой скорости
вращения ω,
динамический момент МД
будет уменьшаться и при некоторой
скорости ω=ωУСТ,
динамический момент станет равным нулю.
Рисунок 1.8
Найдем динамический
или избыточный момент:
![]() .
.
Поставим перед
собой задачу, используя характеристики,
записать дифференциальные уравнения.
Соответственно найдем их решение и
построим динамические характеристики
![]() ,
представленные на рисунке 1.9.
,
представленные на рисунке 1.9.
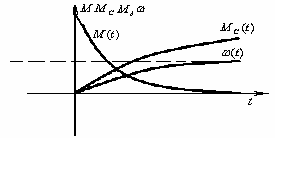
Рисунок 1.9
2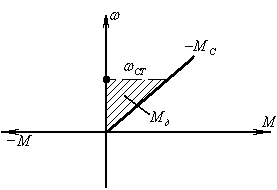 .
Пусть в момент времени t=0
ЭП вращается с угловой скоростью
.
Пусть в момент времени t=0
ЭП вращается с угловой скоростью
![]() под действием М и МС,
представленных в предыдущем примере.
Пусть в этот момент двигатель выключается
из сети и при этом М=0 и на единичный
элемент действует только МС.
Тогда МД=
- МС.
под действием М и МС,
представленных в предыдущем примере.
Пусть в этот момент двигатель выключается
из сети и при этом М=0 и на единичный
элемент действует только МС.
Тогда МД=
- МС.
.
Рисунок 1.10
Записать дифференциальные уравнения и найти их решение. Динамические характеристики представлены на рисунке 1.11
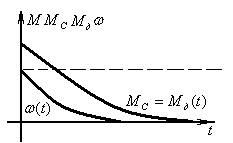
Рисунок 1.11
3. Ту же самую задачу решим при условии, что статический момент сопротивления постоянный.
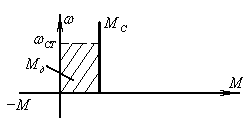
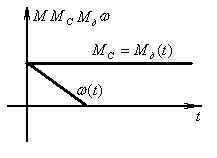
Рисунок 1.12
1.1.1.6 Анализ механической части силового канала электропривода
Чаще всего механическую часть силового канала представляют в виде совокупности двух вращающихся элементов: электродвигателя и производственного механизма, связанных между собой упругой связью (рисунок 1.13). Причем упругость этой связи может быть различной. Для упрощения анализа механической части силового канала электропривода необходимо произвести предварительную операцию, которая носит название приведение моментов и моментов инерции электропривода к скорости вращения вала электродвигателя.
М2
J1



J2
М1
ω1

ω2
Рисунок 1.13 – Механическая часть силового канала электропривода
![]() -момент
инерции первого элемента ЭД,
-момент
инерции первого элемента ЭД,
![]() -момент
инерции второго элемента ИОПМ,
-момент
инерции второго элемента ИОПМ,
![]() -скорость
вращения вала первого элемента,
-скорость
вращения вала первого элемента,
![]() -скорость
вращения вала второго элемента,
-скорость
вращения вала второго элемента,
![]() -момент,
действующий на первый элемент,
-момент,
действующий на первый элемент,
![]() -момент,
действующий на второй элемент
-момент,
действующий на второй элемент
Приведём значение момента инерции второго элемента ИОПМ к угловой скорости вращения первого элемента .
Условием приведения моментов инерции является равенство кинетических энергий приведенного и неприведенного моментов инерции.
![]() ,
,
 ,
,
![]() ,
,
где
![]() - передаточное число.
- передаточное число.
Тогда
суммарный момент инерции
![]() будет
равен:
будет
равен:
![]() .
.
Приведём значение
момента
,
действующего на второй элемент, к
угловой скорости вращения первого
элемента
![]() .
.
Условием приведения моментов является равенство мощностей приведенного и неприведенного моментов.
![]() ,
,
![]() ,
,
где
![]() -
передаточное число.
-
передаточное число.
Тогда суммарный момент будет равен:
![]()
Лекция 5