

3.7.2Динамическое торможение
Динамическое торможение является наиболее универсальным и широко применяемым способом торможения электроприводов с АД.
Для реализации динамического торможения статорную обмотку АД отключают от трехфазного переменного напряжения и подключают к источнику, с помощью которого в статорной обмотке создается постоянное неподвижное магнитное поле (статическое магнитное поле). Статическое магнитное поле, взаимодействуя с вращающимся ротором, будет создавать электромагнитный момент, который в соответствии с принципом Ленца, будет направлен против направления вращения двигателя, т. е. будет являться тормозным. Для создания статического магнитного поля статора может быть использовано два метода:
Первый метод заключается в подключении к сети постоянного напряжения.
~U

Рисунок 3.25 – Динамическое торможение с подключением к сети постоянного напряжения. КЛ – линейный контактор, КТ – контактор торможения.
При работе в двигательном режиме контакты КЛ замкнуты, КТ разомкнуты. Для перехода в режим динамического торможения размыкают контакты КЛ и одновременно замыкают контакты КТ.
Второй метод заключается в использовании батарей статических конденсаторов.
~U

Рисунок 3.26 – Динамическое торможение с использованием батарей статических конденсаторов
Особенностью режима динамического торможения является то, что при полной остановке двигателя, т. е. угловая скорость вращения равна нулю, тормозной момент МТ в соответствии с принципом Ленца также будет равен нулю. Это обеспечивает процессу торможения важное преимущество, как точность.
Механические характеристики при динамическом торможении показаны на рис. 3.27.
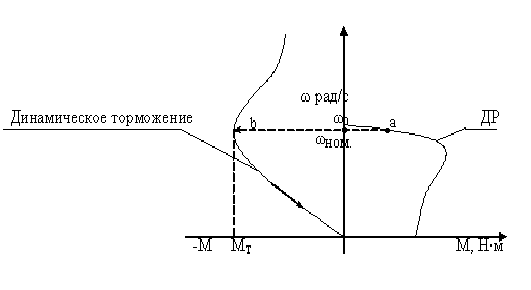
Рисунок 3.27 – Механические характеристики при динамическом торможении
Энергетические потоки в процессе динамического торможения имеют следующие направления: кинетическая энергия механизма направлена от механизма к двигателю (генераторный режим); электрическая энергия от источника трехфазного переменного напряжения отсутствует, т. е. равна нулю; электрическая энергия постоянного напряжения не учитывается. При этом кинетическая энергия механизма преобразуется в тепловую энергию, которая в свою очередь рассеивается в двигателе. Поэтому, как правило, тепловой режим двигателя при динамическом торможении может быть напряженным, но не опасным и в любом случае по сравнению с режимом торможения противовключением более легким.
Таким образом, преимуществом динамического торможения является относительная простота реализации и высокая точность остановки двигателя. Недостатком является относительно низкая энергетическая эффективность.
Для реализации динамического торможения чаще используют метод с подключением к сети постоянного напряжения.
Второй метод (динамическое торможение с использованием батарей статических конденсаторов) требует для создания необходимого по величине статического магнитного поля конденсаторов большой емкости, что существенно ухудшает массогабаритные показатели электропривода.
Необходимо отметить, что электропривод, в котором реализуется динамическое торможение, должен обладать, во-первых, необходимым быстродействием, а во-вторых, тепло должно распространяться по статорным обмоткам двигателя по возможности равномерно.
Различают три способа подключения статорной обмотки к источнику постоянного напряжения:


или


или


или
Первому требованию, а именно, быстродействию, соответствует первая схема, так как в ней производится наименьшее количество переключений. Второму требованию соответствует вторая схема, так как в этом случае по всем трем фазам статорной обмотки будет протекать один и тот же ток, и как следствие они будут нагреваться равномерно.
Лекция 15