

Частотное регулирование скорости ад, законы регулирования, характеристики, анализ.
Д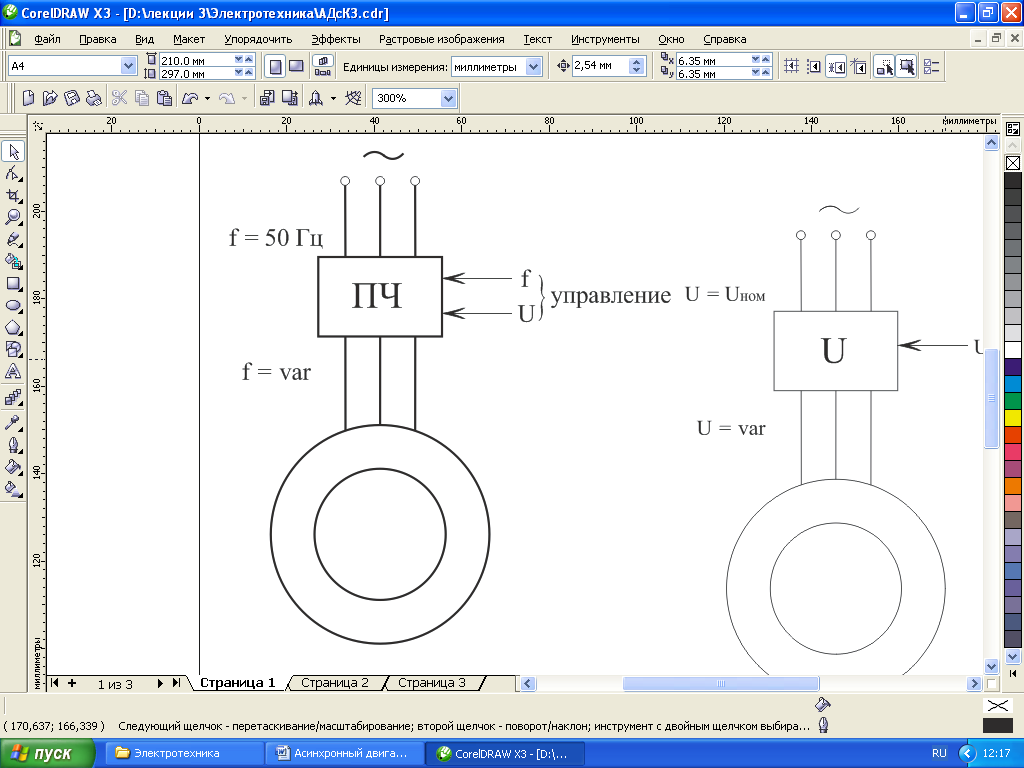 ля
обеспечения эффективной работы двигателя
при частотном регулировании необходимо
с изменением f
изменять и подводимое напряжение
настолько, чтобы отношение U/f
оставалось величиной постоянной.
Очевидно, что это условие можно выполнить
только при уменьшении f<50
Гц, потому что уменьшение напряжения
U<Uном
допускается условиями эксплуатации
двигателя.
ля
обеспечения эффективной работы двигателя
при частотном регулировании необходимо
с изменением f
изменять и подводимое напряжение
настолько, чтобы отношение U/f
оставалось величиной постоянной.
Очевидно, что это условие можно выполнить
только при уменьшении f<50
Гц, потому что уменьшение напряжения
U<Uном
допускается условиями эксплуатации
двигателя.
При увеличении f>50 Гц следовало бы пропорционально увеличить и напряжение U>Uном, однако, это не допустимо по условия эксплуатации двигателя. Это обстоятельство отразится на форме механической характеристики.
Отметим, что в любом случае при изменении f изменится и частота вращения магнитного поля (т. е. положение точки n1 на механической характеристике). Таким образом, положение точки n1 может быть ориентиром в изображении искусственных механических характеристик.
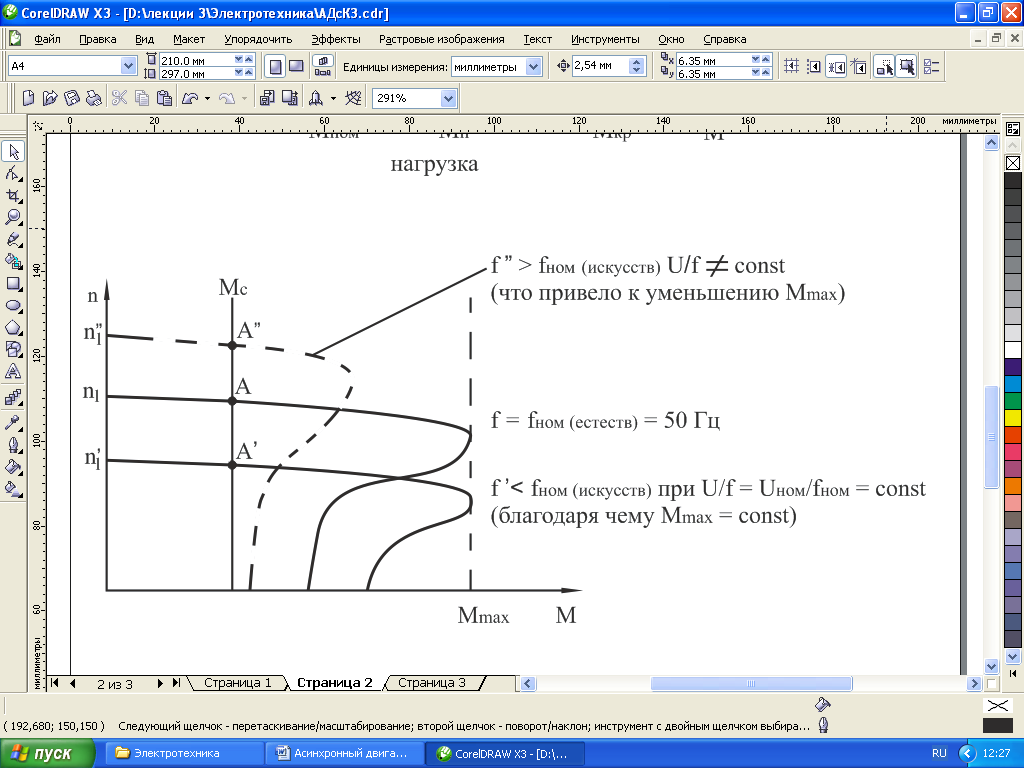
Если привести механическую характеристику механическую характеристику механизма (пусть Мс=const, где Мс — момент сопротивления), то можно оценить диапазон регулирования скорости при частотном регулировании, где А, А', А" — рабочие точки, полученные при условии Мдв=Мс.
Достоинства частотного способа регулирования скорости АД: плавность регулирования: плавно изменяя f, получаем большое количество искусственных характеристик, а, следовательно, и скоростей; большой диапазон с регулировкой как вверх так и вниз от номинальной (двухзонное регулирование).
Недостатки: необходимость установки частотного преобразователя, что значительно увеличивает стоимость электропривода.
Полюсное регулирование скорости ад: принцип изменения пар полюсов, характеристики, анализ, рекомендации в применении.
ПОЛЮСНОЕ
РЕГУЛИРОВАНИЕ предусматривает
возможность изменения числа пар полюсов
Pп.
Такой способ возможен только у
специальных —
многоскоростных, асинхронных двигателей
и достигается за счет переключения
отдельных секций, из которых состоит
катушка (обмотка) статора с последовательного
соединения на параллельное или наоборот,
причем число пар полюсов при
последовательном соединении больше в
2 раза, чем при параллельном, т. е.
Pп
посл.=2Pп
парал.,
а, следовательно,
 .
Очевидно, что положение точки n1
на механической характеристике изменится
в 2 раза.
.
Очевидно, что положение точки n1
на механической характеристике изменится
в 2 раза.
Э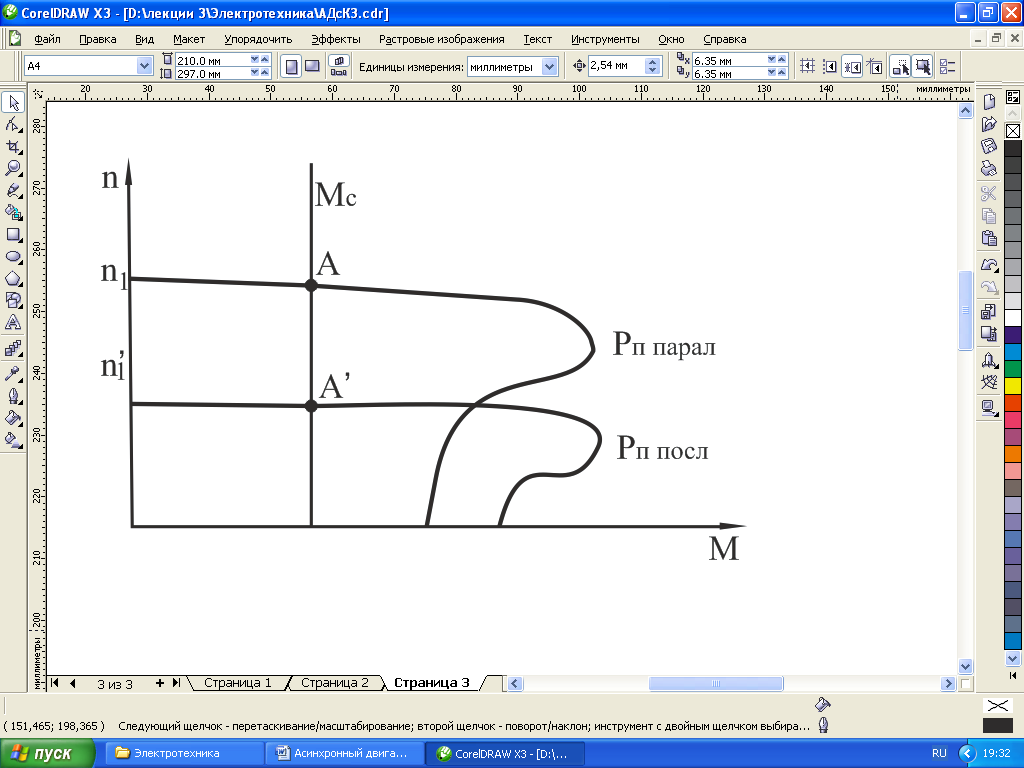 ти
двигатели (многоскоростные) имеют более
сложную обмотку статора, позволяющую
изменять ее число пар полюсов, и
короткозамкнутый ротор. При работе
асинхронного двигателя необходимо,
чтобы обмотки ротора и статора имели
одинаковое число пар полюсов. Только
короткозамкнутый ротор способен
автоматически приобретать то же число
пар полюсов, что и поле статора.
Многоскоростные двигатели нашли широкое
применение в приводе металлорежущих
станков. Нашли применение двух, трех и
четырех скоростные двигатели.
ти
двигатели (многоскоростные) имеют более
сложную обмотку статора, позволяющую
изменять ее число пар полюсов, и
короткозамкнутый ротор. При работе
асинхронного двигателя необходимо,
чтобы обмотки ротора и статора имели
одинаковое число пар полюсов. Только
короткозамкнутый ротор способен
автоматически приобретать то же число
пар полюсов, что и поле статора.
Многоскоростные двигатели нашли широкое
применение в приводе металлорежущих
станков. Нашли применение двух, трех и
четырех скоростные двигатели.
У двухскоростного двигателя обмотка каждой фазы состоит из двух полуобмоток. Включая их последовательно или параллельно можно в 2 раза изменять число пар полюсов.
У четырехскоростного двигателя на статоре должно размещаться две независимые обмотки с разным числом пар полюсов. Каждая из обмоток позволяет в два раза изменять число пар полюсов. Например, у двигателя, работающего от сети c частотой f=50 Гц, со следующими частотами вращения 3000/1500/1000/500 [об/мин] с помощью одной из обмоток статора можно получить частоту вращения 3000 об/мин и 1500 об/мин (при этом p=1 и p=2). С помощью другой из обмоток можно получить частоту вращения 1000 об/мин и 500 об/мин (при этом p=3 и p=6).
При переключении числа пар полюсов изменяется и магнитный поток в зазоре, что приводит к изменению критического момента Mкр (рис. 2.23.б). Если при изменении числа пар полюсов одновременно изменять и подведенное напряжение, то критический момент может остаться неизменным (рис. 2.23.а). Поэтому при этом способе регулирования могут быть получены два вида семейства механических характеристик (рис. 2.23).
Д остоинства
полюсного регулирования:
простота реализации, отсутствие
специальных преобразующих устройств
в цепи питания двигателя, сохранение
жесткости механических характеристик,
высокий К.П.Д. Недостатки:
ступенчатость при регулировании,
небольшой диапазон регулирования,
большие
габариты и большая стоимость двигателя.
остоинства
полюсного регулирования:
простота реализации, отсутствие
специальных преобразующих устройств
в цепи питания двигателя, сохранение
жесткости механических характеристик,
высокий К.П.Д. Недостатки:
ступенчатость при регулировании,
небольшой диапазон регулирования,
большие
габариты и большая стоимость двигателя.