

44. Механическая система гибкого эндоскопа
Механическая система служит для обеспечения управления всеми элементами и узлами эндоскопа.В механическую систему входят: дистальная управляемая трубка, гибкая неуправляемая трубка (тубус) и механизм управления изгибом дистального конца (управляемой трубки). Дистальная управляемая трубка и тубус образуют рабочую часть (конец) эндоскопа.
Термин «дистальный» означает рабочую, наиболее удаленную от наблюдателя часть прибора (distalis – удалённый), а термин «проксимальный» означает наиболее приближенную к наблюдателю часть прибора (proximalis – приближенный). Эти термины пришли из медицинской эндоскопии.Механическая система имеет большое значение для работоспособности эндоскопов. От параметров этой системы зависит вообще возможность работы с прибором. Так, например, жесткость тубуса влияет на возможность введения эндоскопа в исследуемую протяженную полость. Величина и равномерность изгиба дистальной управляемой трубки влияет на возможность осмотра узких полостей. Например, при прохождении сложных участков могут образовываться петли тубуса, которые затрудняют манипуляции эндоскопом и которые необходимо «развязывать» в ходе этих манипуляций. Рассмотрим основные элементы механической системы.
45.Механизм управления изгибом дистального конца
Для управления гибкой частью эндоскопа используются различные механизмы, наиболее распространенные из которых представлены на рисунке
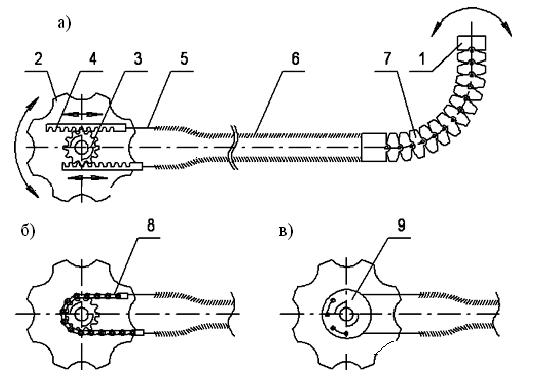
Для отклонения дистального конца 1 в нужном направлении (рисунок 4.7, а) вращательное движение рукоятки 2 с зубчатым колесом 3 преобразовывается в поступательное перемещение зубчатых реек 4, с которыми связаны гибкие тяги-тросы 5. Эти тяги проходят через гибкие оболочки 6, сочленение 7 и другим концом крепятся к объективной части. При вращении рукоятки 2 с зубчатым колесом 3 зубчатые рейки 4 перемещаются в противоположные стороны, натягивая одну и отпуская другую тягу 5. За счет разности усилий дистальный конец с гибким сочленением поворачивается в сторону с большим усилием тяги.
46. Конструкционные особенности видиоэндоскопов
В видеоэндоскопе
нет регулярного волоконно-оптического
жгута для передачи изображения, его
функцию выполняет электронный датчик
или CCD-чип, находящийся на дистальном
конце эндоскопа. Это устройство
электронным путем передает изображение,
формируемое объективом эндоскопа, в
видеопроцессор, а затем картинка
выводится на телевизионный монитор

Появилась возможность осуществлять управление дистальным концом в положении, удобном для исследователя, а наблюдение за эндоскопическим изображением вести по телевизионному монитору. Сама конструкция видеоэндоскопов предполагает более высокую их надежность по сравнению с оптическими эндоскопами, где для передачи изображения служат волоконные жгуты из сверхтонких волокон, которые достаточно ломкие.
Очень высокая разрешающая способность современных видеоэндоскопов позволяет наблюдать такие предметы, которые практически невозможно различить через классический волоконный эндоскоп.