1.3.5 Модуляция
Для передачи информации по каналу связи необходимо иметь переносчик сигналов, в качестве которого может быть использован любой физический процесс, способный распространяться в пространстве. Переносчиками информации могут быть, например, звуковые волны, свет и т.д. В автоматизированных системах в качестве переносчика сигналов используют электрический ток, способный практически мгновенно распространяться по проводам на большое расстояние. Для нанесения сигнала на переносчик (электрический ток) необходимо воздействовать на параметры переносчика с целью их изменения во времени по заданному закону.
Модуляция — процесс нанесения информации на переносчик, а параметры переносчика, на которые воздействуют при нанесении информации, называются качествами (признаками) электрического тока.
В качестве переносчика информации может быть использован постоянный ток, переменный синусоидальный ток или периодическая последовательность импульсов. При модуляции постоянного тока возможна амплитудная модуляция (AM), т.е. воздействие на амплитуду тока или напряжения (рис. 1.10, а). Гармонические колебания переменного тока характеризуются амплитудой (рис. 1.10, б), частотой (рис. 1.10, в) и фазой (рис. 1.10, г), а периодическая последовательность импульсов — амплитудой (рис. 1.10, д), шириной (време
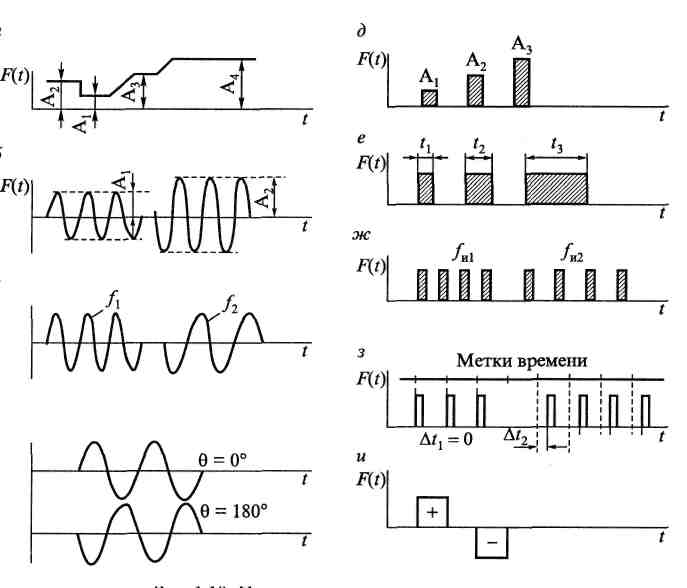
Рис. 1.10. Признаки электрического тока: а — амплитудный при постоянном токе; б, в, г — амплитудный, частотный и фазовый при гармоническом колебании; д, е, ж, з,и — амплитудный, временной, частотный, фазовый и полярный при периодической последовательности импульсов
нем) импульсов (рис. 1.10, е), частотой повторения (рис. 1.10, ж), фазой (рис. 1.10, з) и полярностью (рис. 1.10, и).
К признакам электрического тока предъявляют следующие основные требования:
возможность получения большого числа состояний признака;
простота образования и обнаружения признака;
возможность независимой передачи в одной физической среде, например в линии связи;
способность противостоять помехам и воздействиям линии связи и аппаратуры.
Наиболее универсальным является частотный признак, который может иметь неограниченное число состояний и позволяет одновременно передавать по одной линии несколько состояний. Амплитудный признак больше подвержен действию помех, чем частотный.
Выбор вида модуляции определяется переносчиком и его параметром (признаком), на который воздействуют при нанесении информации. Гармоническое колебание характеризуется амплитудой, частотой и фазой, и может быть описано выражением
a(f) = A0sin(ω0t + φ0), (1.14)
где
А0,
 0,
φ0
—
соответственно амплитуда, частота и
начальная фаза несущего колебания.
0,
φ0
—
соответственно амплитуда, частота и
начальная фаза несущего колебания.
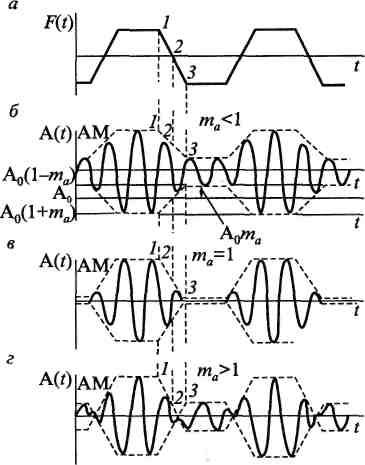
При амплитудной модуляции (AM) по закону изменения сигнала F(t) меняется амплитуда несущего колебания. На рис. 1.11, а показан изменяющийся во времени управляющий сигнал F(t), который необходимо нанести на амплитуду А0 гармонического колебания, при этом амплитуда получит некоторое приращение А. Амплитуда модулированного колебания равняется А0 (1 ± та),
где
 =
=
 —
глубина модуляции
—
глубина модуляции
(рис. 1.11,6). Чтобы не произошло искажение передачи, приращение А не должно быть больше А0. При ∆А = А0 имеем та = 1 (рис. 1.11, в). Дальнейшее увеличение ∆А приводит к тому, что та становится больше 1 (рис. 1.11, г), при этом возникают искажения. Как видно на рис. 1.11, амплитуда модулированного колебания меняется во времени по закону изменения сигнала F(t), наносимого на гармоническое колебание:
А(0 = А0 [1 + та Fit)]. (1-15)
Следовательно
модулированное колебание не является
гармоническим и должно раскладываться
на гармонические составляющие.
Разложение
АМ-колебаний в спектр показывает, что
в нем содержится
несущее колебание с частотой ω0,
а также колебания верхних и нижних
боковых частот. В простейшем случае,
если модуляция осуществляется
синусоидальным низкочастотным сигналом
с частотой
 ,
в
спектре имеется несущее колебание с
частотой ω0,
верхняя боковая гармоника
с частотой
ω
0
+
и
нижняя — с частотой ω0
-
,
в
спектре имеется несущее колебание с
частотой ω0,
верхняя боковая гармоника
с частотой
ω
0
+
и
нижняя — с частотой ω0
-
Для уменьшения полосы частот широко используют однополосную амплитудную модуляцию, при которой в канал связи передают только одну из боковых частот без несущей. Уменьшение полосы частот канала и повышение мощности гармоник, несущих информацию, позволяет повысить помехоустойчивость.
При частотной модуляции (ЧМ) по закону меняющегося управляющего сигнала F(t) изменяется частота несущего колебания:
 +
+

где
—
девиация частоты, т.е. наибольшее
отклонение ее от.

 0)
0)
Наиболее наглядно можно представить частотную модуляцию при управляющем модулирующем сигнале в виде последовательности разнополярных прямоугольных импульсов (рис. 1.12, а). В этом случае передаче положительного импульса соответствует частота ω 0 + , передаче отрицательного — частота ω 0 - , а при паузе передается несущая частота.
ω 0
При передаче однополярных импульсов (рис. 1.12, б) импульс передается частотой 0 + ∆ω, пауза — другой частотой 0 - ∆ω, Несущая часть
при передаче отсутствует, она равна средней арифметической между частотой импульса и паузы.
Спектр ЧМ-колебания состоит из гармоник несущей частоты и боковых полос (верхней и нижней). Число гармоник в каждой боковой полосе бесконечно даже при модуляции синусоидальным сигналом (в отличие от AM, при которой в этом случае имеется по одной боковой гармонике с каждой стороны). Полоса частот при ЧМ значительно шире, чем при AM, и это является недостатком ЧМ. Однако при ЧМ обеспечивается существенно большая помехоустойчивость, чем при AM.
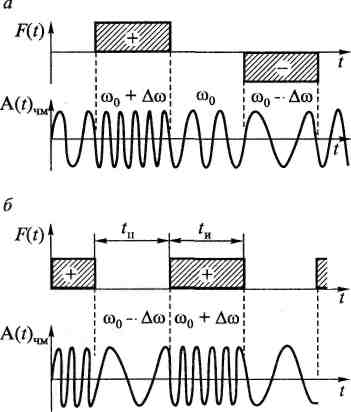
Рис.1.12 Частотная модуляция гармонического колебания при прмоугольном разнополярном а) и однополярном б) сигнале
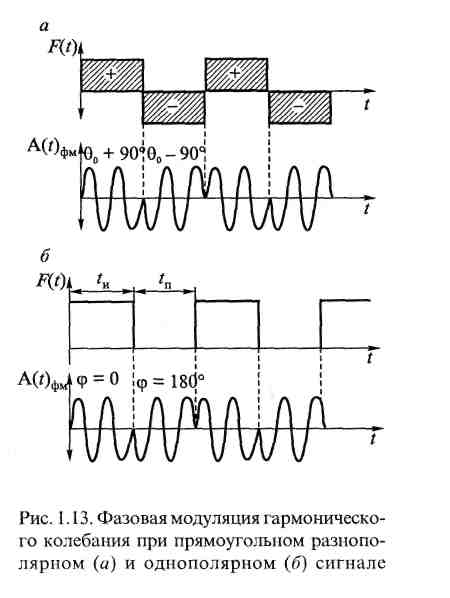
При фазовой
модуляции (ФМ)
по закону управляющего сигнала изменяется
фаза несущего колебания.
На рис. 1.13, а показана модуляция
гармонического колебания разнополярным
прямоугольным сигналом.
Угол,
на который изменяется фаза, называется
углом модуляции,
который на рис. 1.13,
а составляет 180° (от
 + 90° до
- 90°). При
однополярных импульсах передаче
импульса соответствует фазовый угол
+ 90° до
- 90°). При
однополярных импульсах передаче
импульса соответствует фазовый угол
 = 0°, а паузе — φ = 180° (рис. 1.13, б).
Углы
и φ соответствуют начальной фазе
несущего гармонического колебания.
= 0°, а паузе — φ = 180° (рис. 1.13, б).
Углы
и φ соответствуют начальной фазе
несущего гармонического колебания.
Установлено, что при равной ширине полосы частот и скорости передачи наибольшую помехоустойчивость обеспечивает фазовая модуляция, наименьшую — амплитудная, а частотная занимает промежуточное положение.
При импульсной модуляции (ИМ) в качестве несущего колебания используют периодическую последовательность импульсов. По закону изменения управляющего сигнала F(t) a(t) (рис. 1.14, а) модулируют один из параметров переносчика а(t) рис.1.14 При этом различают амплитудно-импульсную (АИМ) рис.1.14 в), широтно-импульсную (ШИМ) рис.1.14 г), частотно-импульсную (ЧИМ).1.14д), фазо-импульсную (ФИМ) РИС.1.14 е) полярно-импульсную 9ПИМ0 9на рис.1.14 отсутствует) модуляции.
Частоту
следования импульсов несущего колебания
выбирают, используя теорему В.А.
Котельникова, согласно которой число
значений n
модулирующего сигнала с шириной спектра

Которое надо передать за время Т, определяется формулой n= 2 FT 1.17
Отсюда следует
:
 =
=
 =2
=2 1.18
В
этом случае трудно выделить сигнал из
импульсно-модулиро-ванного колебания,
так как наивысшая частота модулирующего
и частота модулируемого колебаний очень
близки. Поэтому частоту модулируемого
колебания выбирают в 2-3 раза больше, чем
следует из выражения (1.18).
1.18
В
этом случае трудно выделить сигнал из
импульсно-модулиро-ванного колебания,
так как наивысшая частота модулирующего
и частота модулируемого колебаний очень
близки. Поэтому частоту модулируемого
колебания выбирают в 2-3 раза больше, чем
следует из выражения (1.18).
Кроме простых видов модуляции, рассмотренных выше, широко применяют и сложные, в которых одновременно осуществляется модуляция нескольких параметров или два различных несущих колебания (периодическая последовательность импульсов и гармоническое колебание). Например, АИМ-АМ представляет собой модуляцию управляющим сигналом по методу АИМ периодической последовательности импульсов, а полученным сигналом модулируется по амплитуде несущее гармоническое колебание
Широко применяется также особый способ преобразования сигнала называемый кодо-импульсной модуляцией (КИМ) смысл которой заключается в квантовании непрерывного сигнала в передаче
его дискретных значений кодовой комбинацией импульсов.

1.14 импульсная модуляция а-управляющий сигнал б- несущая последовательность импульсов в,г,д,е соответствию АИМ,ШИМ,ЧИМ и ФИМ
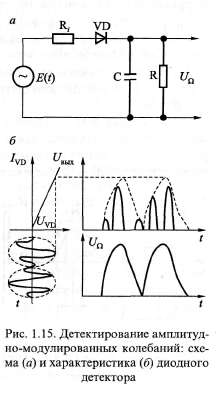
Демодуляция
Демодуляция
— процесс, обратный модуляции, заключается
в выделении сигнала из модулированного
колебания с помощью нелинейных
устройств. Простейшим видом демодуляции
может служить детектирование
(выпрямление)
АМ-колебаний с помощью полупроводникового
диода VD
(рис.
1.15, а).
Источник
АМ-колебаний вырабатывает E(t)
с
переменной амплитудой. Диод VD
пропускает только положительные
полуволны напряжения Uвых
, огибающая
этих полуволн и является сигналом,
представляющим собой низкочастотное
колебание
 (t).
Для выделения низкочастотных колебаний
из выпрямленного напряжения Uвых
применяют фильтры низких частот,
примером которых может служить
С-фильтр, показанный на рис. 1.15, а.
Емкость
конденсатора С выбирают такой, чтобы
ее сопротивление Хc
на
несущей частоте было много меньше
сопротивления R
нагрузки,
а для низкочастотного сигнала, наоборот,
много больше сопротивления нагрузки.
На
положительной полуволне ток протекает
через VD
и происходит заряд конденсатора до
амплитудной величины напряжения. Во
время отрицательной полуволны
конденсатор частично разряжается на
резистор R,
но так как длительность отрицательной
полуволны очень маленькая, то напряжение
на конденсаторе практически
сохраняется. Если
амплитуда следующей положительной
полуволны возрастает, то напряжение
(t).
Для выделения низкочастотных колебаний
из выпрямленного напряжения Uвых
применяют фильтры низких частот,
примером которых может служить
С-фильтр, показанный на рис. 1.15, а.
Емкость
конденсатора С выбирают такой, чтобы
ее сопротивление Хc
на
несущей частоте было много меньше
сопротивления R
нагрузки,
а для низкочастотного сигнала, наоборот,
много больше сопротивления нагрузки.
На
положительной полуволне ток протекает
через VD
и происходит заряд конденсатора до
амплитудной величины напряжения. Во
время отрицательной полуволны
конденсатор частично разряжается на
резистор R,
но так как длительность отрицательной
полуволны очень маленькая, то напряжение
на конденсаторе практически
сохраняется. Если
амплитуда следующей положительной
полуволны возрастает, то напряжение
на конденсаторе (а значит и на выходе детектора) растет, при снижении амплитуды напряжение на выходе снижается. Изменение напряжения (I) происходит по закону кривой огибающей полуволн, т.е. по закону сигнала, который был нанесен на переносчик.
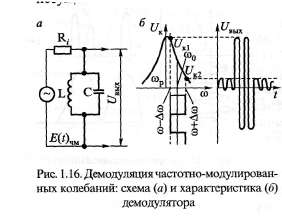
При демодуляции ЧМ-колебаиий предварительно их преобразуют в АМ-колебания, после чего их демодулируют AM-детектором, рассмотренным ранее (см. рис. 1.15).
Простейшим
преобразователем (дискриминатором)
ЧМ-колебаний в АМ-колебания является
одиночный колебательный контур LC
(рис. 1.16, а).
Резонансная
частота
р
контура должна быть сдвинута относительно
несущей частоты
0
ЧМ-колебания таким образом, чтобы весь
спектр сигнала от
0
-
до
0
+
размещался
на одном из спадов резонансной
характеристики UK
=
f(
)
контура (рис. 1.16, б). Тогда при поступлении
от источника ЧМ-колебаний с частотой
0
-
напряжение на LC-контуре
будет иметь амплитуду Uк1,
а при частоте
+
амплитуда снижается до значения
 Таким
образом, на выходе преобразователя
имеем напряжение Uвых,
которое представляет собой АМ-колебание.
Таким
образом, на выходе преобразователя
имеем напряжение Uвых,
которое представляет собой АМ-колебание.
Чтобы преобразование происходило без искажения, спад характеристики UK =f( ) должен быть линейным, что обеспечить довольно трудно
Демодуляция ФМ-колебаний, модулированных прямоугольными импульсами, заключается в сравнении ФМ-сигналов с некоторым опорным напряжением, имеющим частоту, равную частоте несущего колебания ФМ сигнала (синхронное напряжение). В простейшем случае фаза опорного колебания должна совпадать с фазой импульса или паузы.
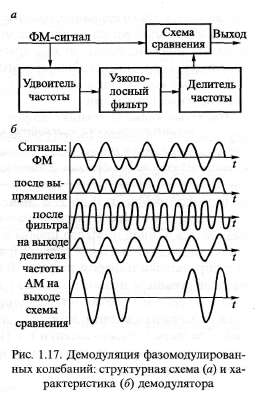
Существует много методов создания опорного напряжения, имеющих те или иные недостатки. Еще в 1933 г. ученый А.А. Пистолькорс предложил схему преобразования ФМ-сигнала в АМ-сигнал (рис. 1.17, а).
Удвоение частоты сигнала, манипулированного по фазе на 180°, приводит к устранению манипуляции. Напряжение удвоенной частоты, полученное в результате выпрямления, пропускают через узкополосный фильтр. На выходе фильтра появляется гармоника с удвоенной частотой. После делителя частоты получаем аналог исходного несущего колебания, которое является опорным напряжением. Из диаграммы (рис. 1.17, б) видно, что в результате сложения ФМ-сигнала с опорным напряжением на выходе делителя частоты появляется АМ-колебание на выходе схемы сравнения, которое затем детектируется уже известным способом (см. рис. 1.15).
Недостатком данной схе-Недостатком данной схемы является трудность в создании опорного напряжения, частота фаза которого должны оставаться стабильными во времени. Сущ ствует опасность так называемой «обратной работы», когда вмест сигнала «1» принимается сигнала «О» и наоборот.