

1.4.1. Взаимодействие объекта и регулятора
Рассмотрим, как будут изменяться основные показатели переходного процесса в случае совместной работы объекта, обладающего положительным самовыражением, с различными типами регуляторов. Как следует из функциональной схемы, приведенной на рис. 23, к объекту приложено два воздействия: внешнее возмущение z(t) и регулирующее воздействие со стороны регулятора x(t).
Объект и статический регулятор (П-регулятор). Динамика САР может быть описана следующими уравнениями:
![]() (33)
(33)
Здесь kx и kz — коэффициенты усиления по рейке топливных насосов и нагрузке соответственyо; k1 и k2 — коэффициенты усиления регулятора.
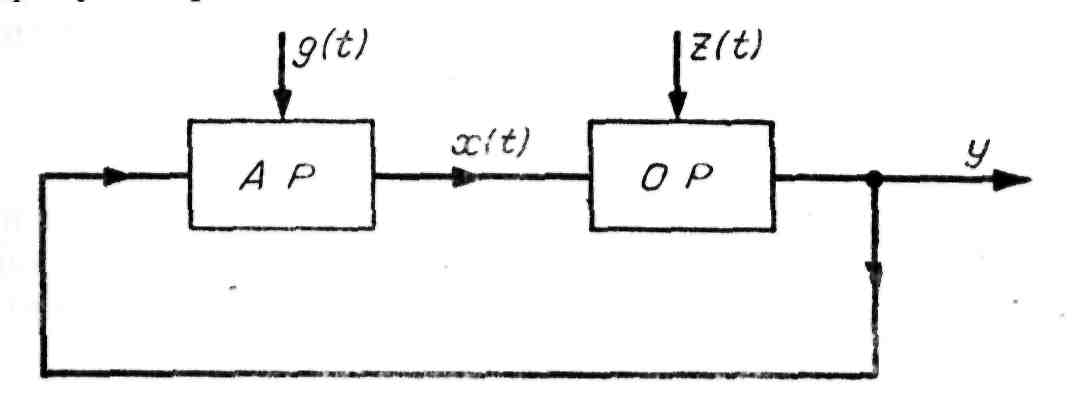
Рис. 23. Функциональная схема САР:
у — регулируемая величина; z(t) — внешнее возмущение;
X(t) — регулирующее воздействие; g(t) — управляющее воздействие
Решая приведенную систему уравнений совместно, получим уравнение динамики САР:
![]() .
(34)
.
(34)
Из полученного уравнения следует, что постоянная времени, а, следовательно, и продолжительность переходного процесса, а также коэффициент усиления, а, следовательно, и ошибка регулирования с введением П-регулятора уменьшились по сравнению с таковыми у двигателей без регулятора.
Объект и астатический регулятор (И-регулятор). Динамика САР в этом случае может быть описана следующими уравнениями:
![]() (35)
(35)
Решая приведенную систему уравнений совместно, получим:
![]() .
(36)
.
(36)
Так как на вход системы подается ступенчатое возмущение z = zc = const, то рz = 0, а, следовательно, и k2pz = 0 (производная от постоянной величины). Левая часть уравнения стала дифференциальным уравнением 2-го порядка, а правая стала равной нулю. Следовательно, переходный процесс может быть колебательным либо апериодическим, но с нулевой ошибкой регулирования.
Объект и изодромный регулятор (ПИ-регулятор). Динамика САР может быть представлена следующей системой уравнений:
 (37)
(37)
решая систему совместно, получим:
![]() .
(38)
.
(38)
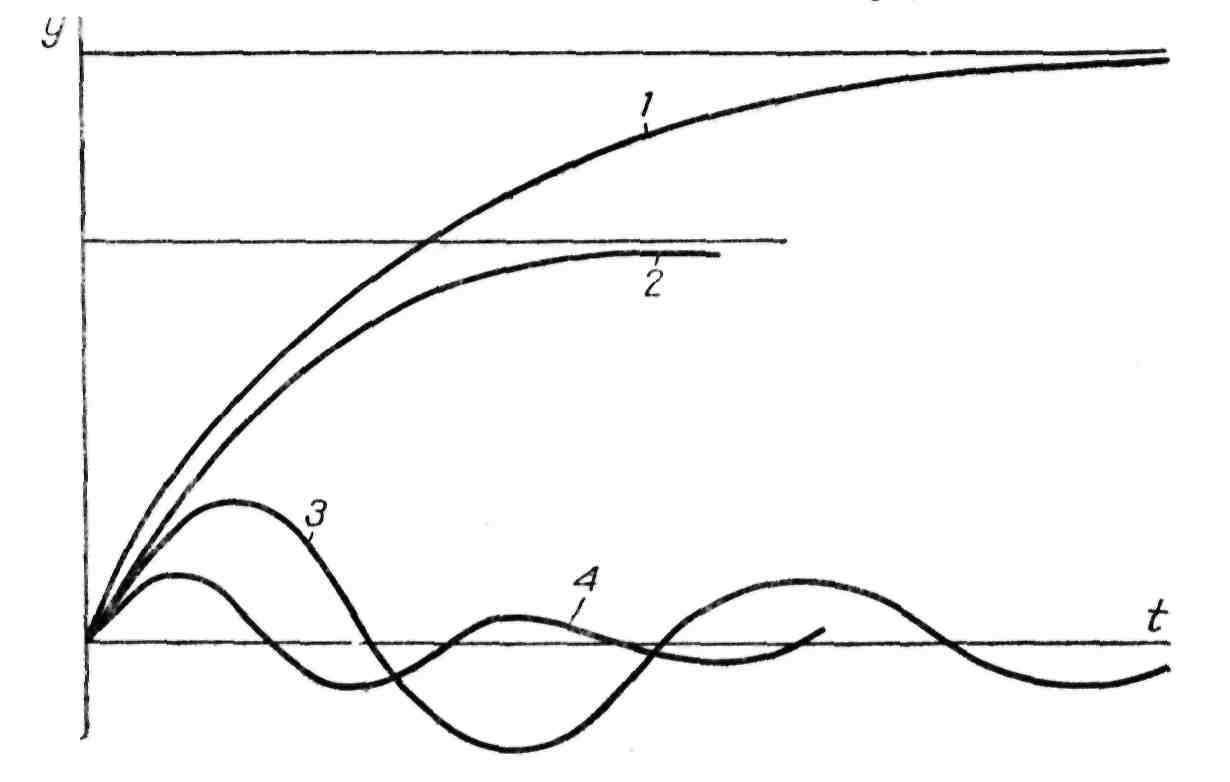
Рис. 24. Переходные процессы в САР:
1 — без регулятора; 2 — с П-регулятором;
3 — с И-регулятором; 4 — с ПИ-регулятором
Как и в предыдущем случае, так как z = zc =const, pz = 0, т.е. ошибка регулирования будет отсутствовать, а переходный процесс может иметь колебательный характер.
Результаты проведенных исследований показаны на рис. 24
1.4.2. Выбор типа и настройки регулятора
Как уже указывалось ранее, САР является динамической системой, статические и динамические характеристики которой (зависимость выходной величины от входной в статике и динамике) определяются характеристиками объекта регулирования и регулятора, а также типом возмущений.
Поэтому при выборе типа регулятора должны учитываться основные характеристики объекта, а также требования, предъявляемые к техническим показателям регулирования (продолжительность переходного процесса, колебательность, статическая и динамическая ошибки).
Так, объекты с большим коэффициентом самовыравнивания могут оборудоваться любым типом регулятора, и если нет особых требований к показателям переходного процесса, то для автоматического регулирования можно использовать простейшие П-регуляторы и И-регуляторы. При наличии больших запаздываний и в то же время медленно изменяющихся возмущениях обычно применяют ПИ-регуляторы, а при резких и частых возмущениях — ПИД-регуляторы. Необходимо отметить, что правильный выбор типа регулятора является очень важной и в то же время достаточно сложной задачей. При настройке регулятора преследуются две цели: обеспечение устойчивой работы САР, под которой понимается способность системы возвращаться к равновесному состоянию после получения возмущений, а также получение требуемого техническими условиями качества регулирования. Параметрами настройки регуляторов являются коэффициенты усиления и, в зависимости от закона регулирования, различные постоянные времени.
Для сложных систем автоматического регулирования до настройки в натурных условиях часто выполняют исследования и настройку модели системы, которая набирается на моделирующих электронных установках.