

1.2.3. Электромагнитные реле
Электромагнитные реле представляют собой устройства, в которых при определенных значениях входного сигнала происходит скачкообразное изменение выходной величины. Схема электромагнитного нейтрального реле, которое одинаково срабатывает независимо от полярности тока, показана на рис. 17. При прохождении тока по катушке якорь притягивается к сердечнику и замыкает правую пару контактов. При прекращении питания пружина перебрасывает якорь, размыкает правые контакты и замыкает левые.
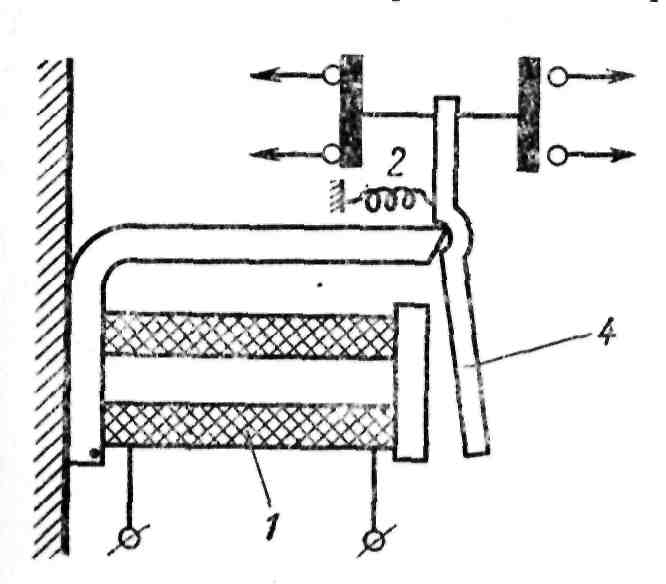
Рис. 17. Схема электромагнитного нейтрального реле:
1 – катушка; 2 – пружина; 3 – контакты; 4 - якорь
Схема трехпозиционного поляризованного реле показана на рис. 18. При отсутствии питания катушки якорь, расположенный между полюсами магнита, находится в среднем положении. В зависимости от полярности тока, подаваемого на катушку, якорь переместится в правое или левое положение, замыкая соответственно правую или левую пару контактов.
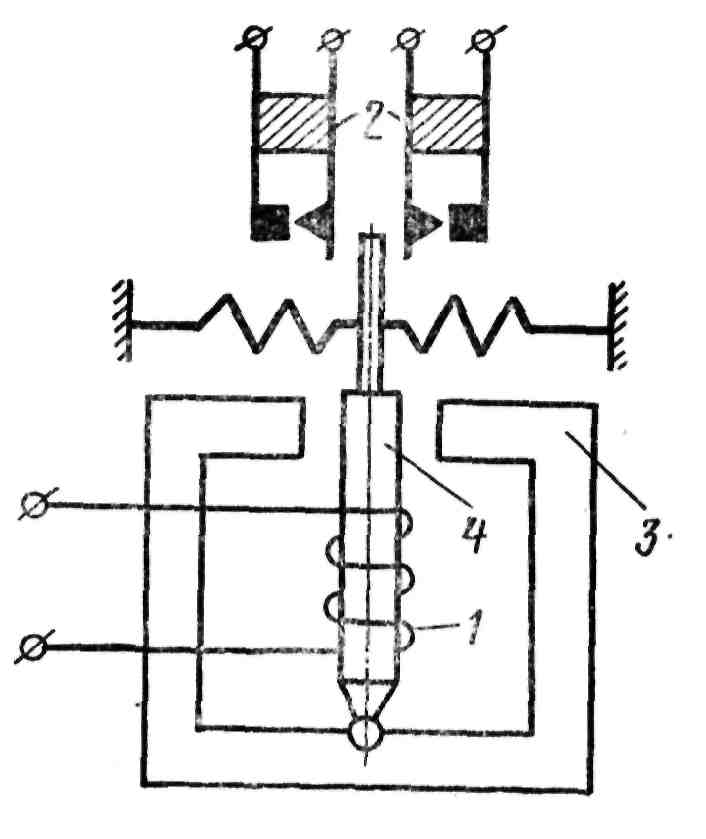
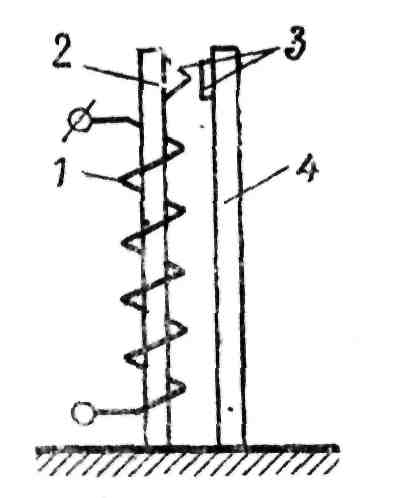
Рис. 18. Схема поляризованного реле: Рис. 19. Схема электро-
1 – катушка; 2 – контакты; 3 – магнит; 4 – якорь термического реле:
1 – обмотка; 2, 4 – биметаллические
пластинки; 3 - контакты
Помимо электромагнитных, широкое распространение получили также электротермические реле (рис. 19). При пропускании тока по обмотке с большим омическим сопротивлением выделяется тепло, под действием которого биметаллическая пластинка нагревается, изгибается и замыкает контакты. Для устранения влияния температуры окружающей среды правая пластинка выполнена также из биметалла.
1.3. Объекты регулирования
Несмотря на различие в устройстве и принципе действия объектов регулирования, статические и динамические свойства, а, следовательно, и поведение их в переходных процессах можно в большинстве случаев описать одним из типовых дифференциальных уравнений, которое дает математическое выражение физического закона, определяющего работу рассматриваемого объекта. Под объектом регулирования понимается машина, аппарат, устройство или система, в которых осуществляется регулирование одной или нескольких величин, называемых регулируемыми величинами.
По структуре объекты регулирования можно разделить на простейшие — одноемкостные и более сложные — многоемкостные. Работа объекта связана с преобразованием энергии или рабочего вещества. Способность объекта накапливать внутри себя рабочее вещество или энергию называется аккумулирующей способностью.
В том случае, когда объект имеет только один участок, в котором может накапливаться рабочее вещество или энергия, он называется одноемкостным объектом. Динамика одноемкостного объекта описывается дифференциальным уравнением 1-го порядка.
При наличии нескольких участков, в которых может аккумулироваться вещество или энергия, причем перетекание энергии или вещества из одного участка в другой происходит через сопротивление, объект будет называться многоемкостным. Схема двухъемкостного объекта показана на рис. 20.
Динамика многоемкостных объектов описывается дифференциальными уравнениями более высоких порядков. Для математического описания многоемкостного объекта необходимо рассматривать каждую из емкостей в отдельности с учетом взаимного влияния их друг на друга.
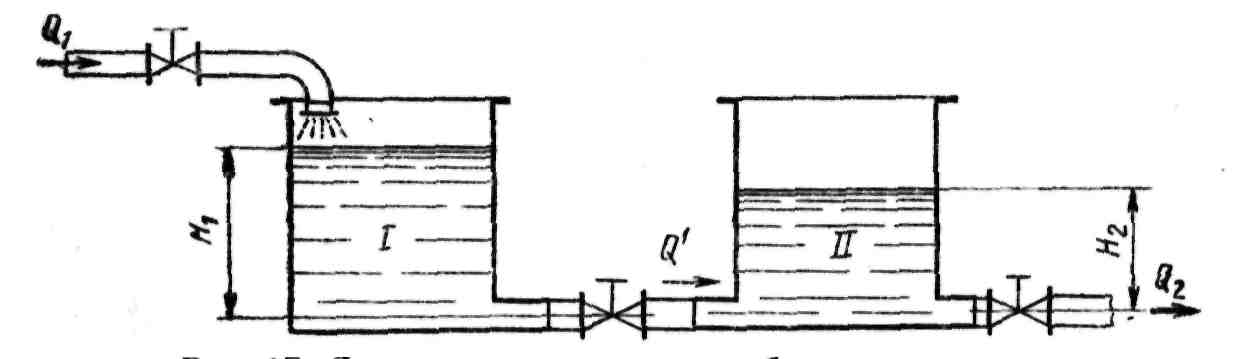
Рис. 20. Схема двухъемкостного объекта регулирования:
Q1 - приток рабочего вещества; Q2 - расход рабочего вещества;
Н1 и Н2 - уровни рабочего вещества; I и II - емкости
Входной координатой объекта регулирования является положение регулирующего органа, на который воздействует автоматический регулятор. Выходной координатой является регулируемая величина. Кроме того, на объект регулирования действуют внешние возмущения.
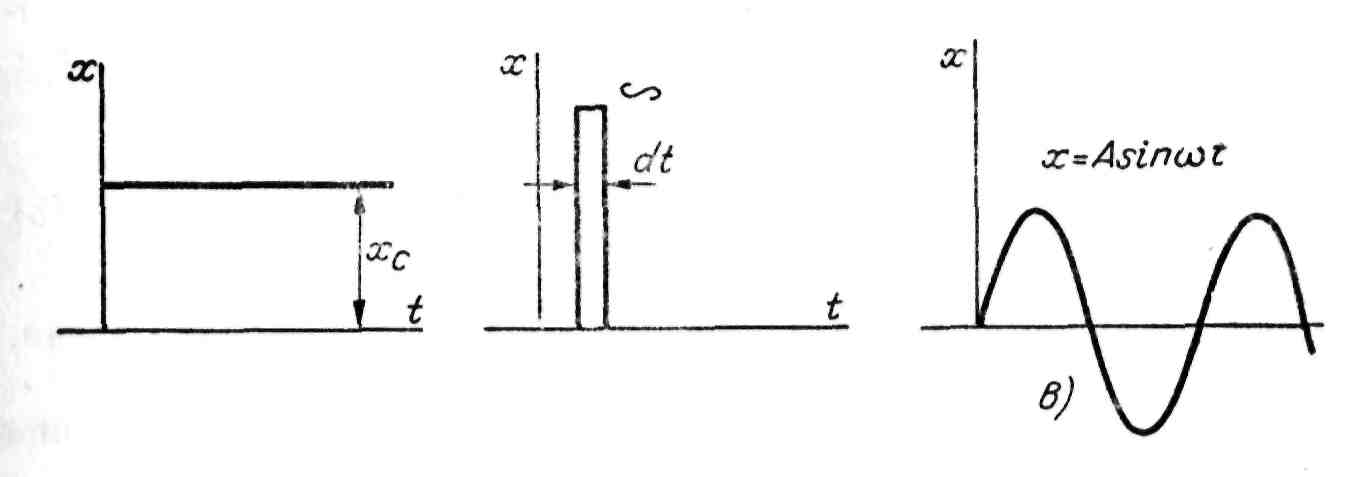
а) 6) в)
Рис. 21. Типовые возмущающие воздействия:
а - ступенчатое; 6 - импульсное; в - гармоническое
При изменении внешней нагрузки или при изменении положения регулирующего органа происходит изменение регулируемой величины на выходе объекта регулирования.
Изменение регулируемой величины во времени при изменении нагрузки или положения регулирующего органа называется переходным процессом.
Очевидно, что характеристики переходного процесса будут изменяться в зависимости от вида возмущающего воздействия. Для возможности сопоставления результатов при исследованиях на вход объекта подают так называемые типовые возмущающие воздействия, к числу которых относятся ступенчатое, импульсное и гармоническое. Схемы указанных возмущающих воздействий приведены на рис. 21. В большинстве случаев исследование переходных процессов производится при резком скачкообразном изменении положения регулирующего органа на небольшую величину, т.е. при ступенчатом возмущении. Такой характер возмущения является одним из наиболее сильных и позволяет по характеру переходного процесса, т.е. по изменению регулируемой величины во времени от одного установившегося режима до другого, определить статические и динамические свойства объекта регулирования.