

2.4. Соединение звеньев, алгебра передаточных функций
Выше была рассмотрена динамика отдельных звеньев, которые входят в состав САР и взаимодействуют между собой. В реальных САР встречаются разнообразные схемы соединения звеньев, которые можно свести к последовательному и параллельному соединению, а также их комбинации. В свою очередь при параллельном соединении может иметь место одинаковое направление входа и выхода либо противоположное. Рассмотрим выражения передаточных функций комплекса элементарных звеньев при различных способах их включения.

Рис. 35. Схема последовательного соединения звеньев
Последовательное соединение. Рассмотрим цепочку, состоящую из трех последовательно соединенных звеньев (рис. 35). На вход первого звена поступает величина х, а на выход последнего — у. Результирующая передаточная функция при последовательном соединении звеньев равна произведению передаточных функций отдельных звеньев:
![]() .
(66)
.
(66)
Параллельное соединение. Случай одинакового направления входа и выхода представлен на рис. 36.
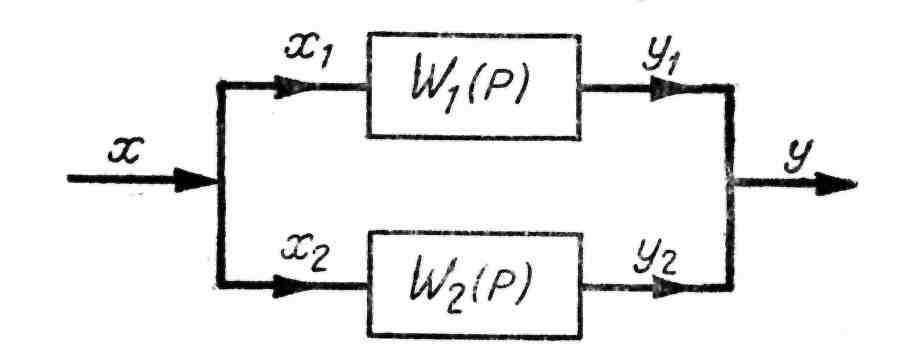
Рис. 36. Схема параллельного соединения звеньев
Передаточная функция параллельно соединенных звеньев равна сумме передаточных функций отдельных звеньев:
![]() .
(67)
.
(67)
Случай противоположного направления сигналов (охват звена обратной связью) представлен на рис. 37. При включении обратной связи входной сигнал х алгебраически суммируется с сигналом, прошедшим через звено обратной связи, и при отрицательной обратной связи он равен:
![]() .
.
В этом случае передаточная функция будет иметь вид:
![]() .
(68)
.
(68)
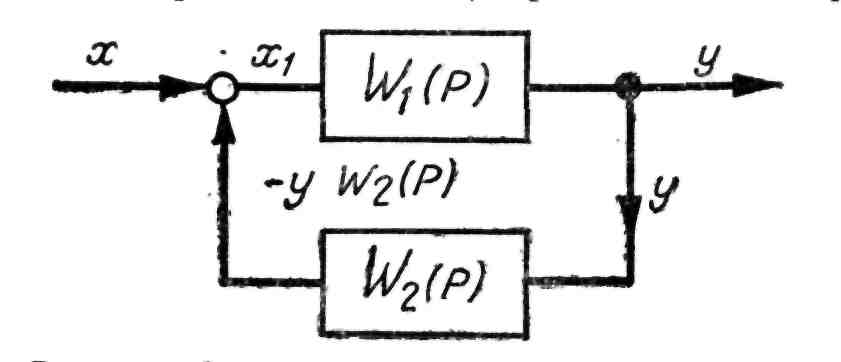
Рис. 37. Схема охвата звена обратной связью
При комбинированном соединении звеньев в САР необходимо контур разбить на отдельные цепи, в которых будут четко выражены последовательное и параллельное соединения, составить передаточные функции для этих цепей, а затем и для всего контура в целом. Таким образом, используя указанные зависимости, можно составить передаточную функцию сложной схемы, из которой при необходимости можно получить дифференциальное уравнение динамики системы.
Из
выражения (68) для передаточной функции
звена, охваченного обратной связью,
принимая ![]() ,
можно
легко получить выражение для передаточной
функции замкнутой системы, схема которой
показана на рис. 38.
,
можно
легко получить выражение для передаточной
функции замкнутой системы, схема которой
показана на рис. 38.
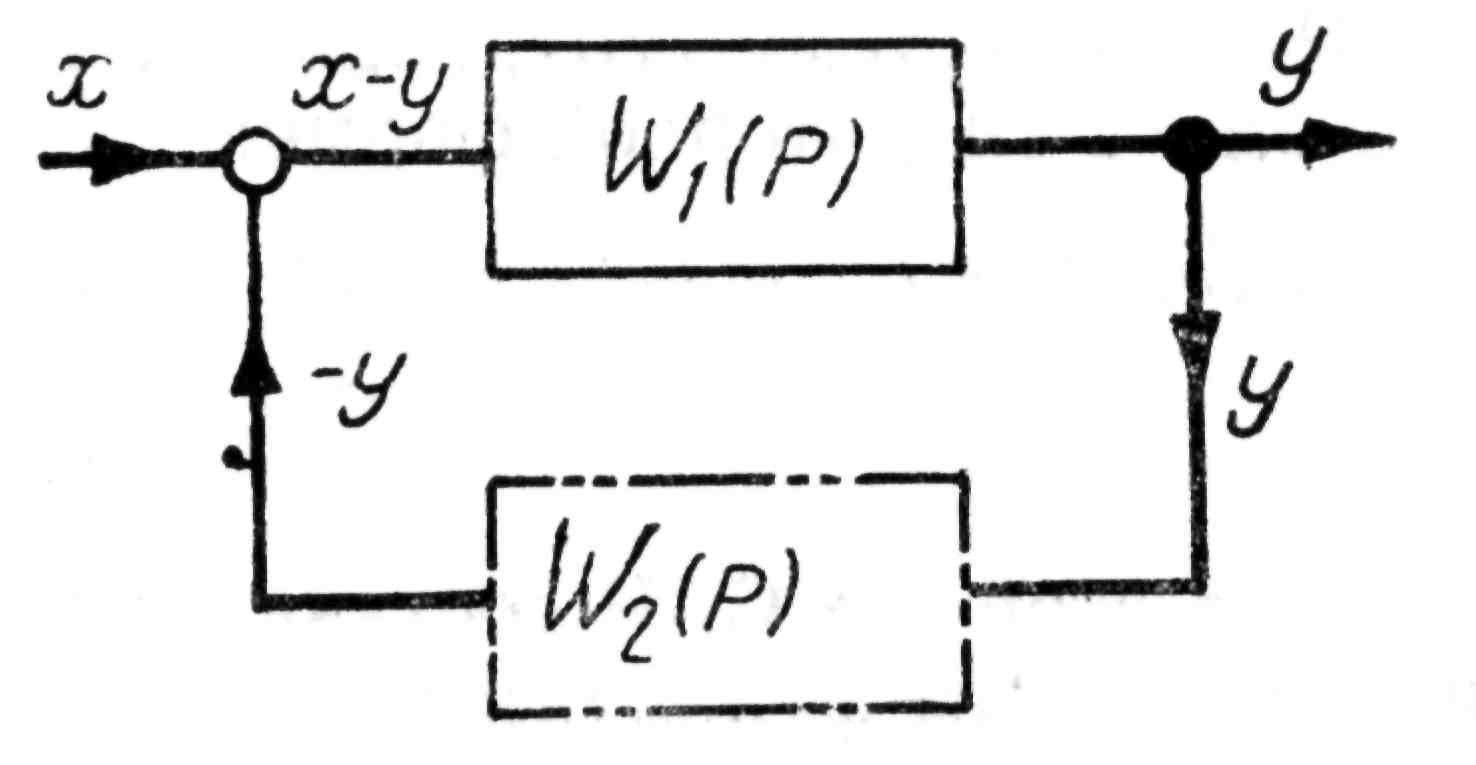
Рис. 38. Схема замыкания звена
Передаточная функция замкнутой системы может быть представлена следующим образом:
![]() ,
(69)
,
(69)
где
![]() — передаточная функция разомкнутой
системы.
— передаточная функция разомкнутой
системы.
2.5. Уравнение динамики замкнутой системы
Система автоматического регулирования состоит из ряда звеньев, динамика которых в общем случае описывается дифференциальными уравнениями. Так как элементы САР находятся во взаимодействии друг с другом, а сама система является замкнутой, то математическим описанием САР будет являться система дифференциальных уравнений динамики звеньев, входящих в систему и их связей. Путем исключения промежуточных координат систему дифференциальных уравнений можно привести к одному дифференциальному уравнению, которое включает в себя только входные воздействия и выходную, регулируемую величину.
В качестве примера рассмотрим систему автоматического регулирования частоты вращения вала теплового двигателя, принципиальная схема которой приведена на рис. 39.
Структурная схема этой САР изображена на рис. 40. Динамику звеньев, входящих в состав системы, запишем в операторной форме:

объект
— ![]() ;
;
чувствительный
элемент — ![]() ;
(70)
;
(70)
сервопривод
— ![]() ,
,
где у — регулируемая величина;
x2 — положение топливорегулирующего органа.
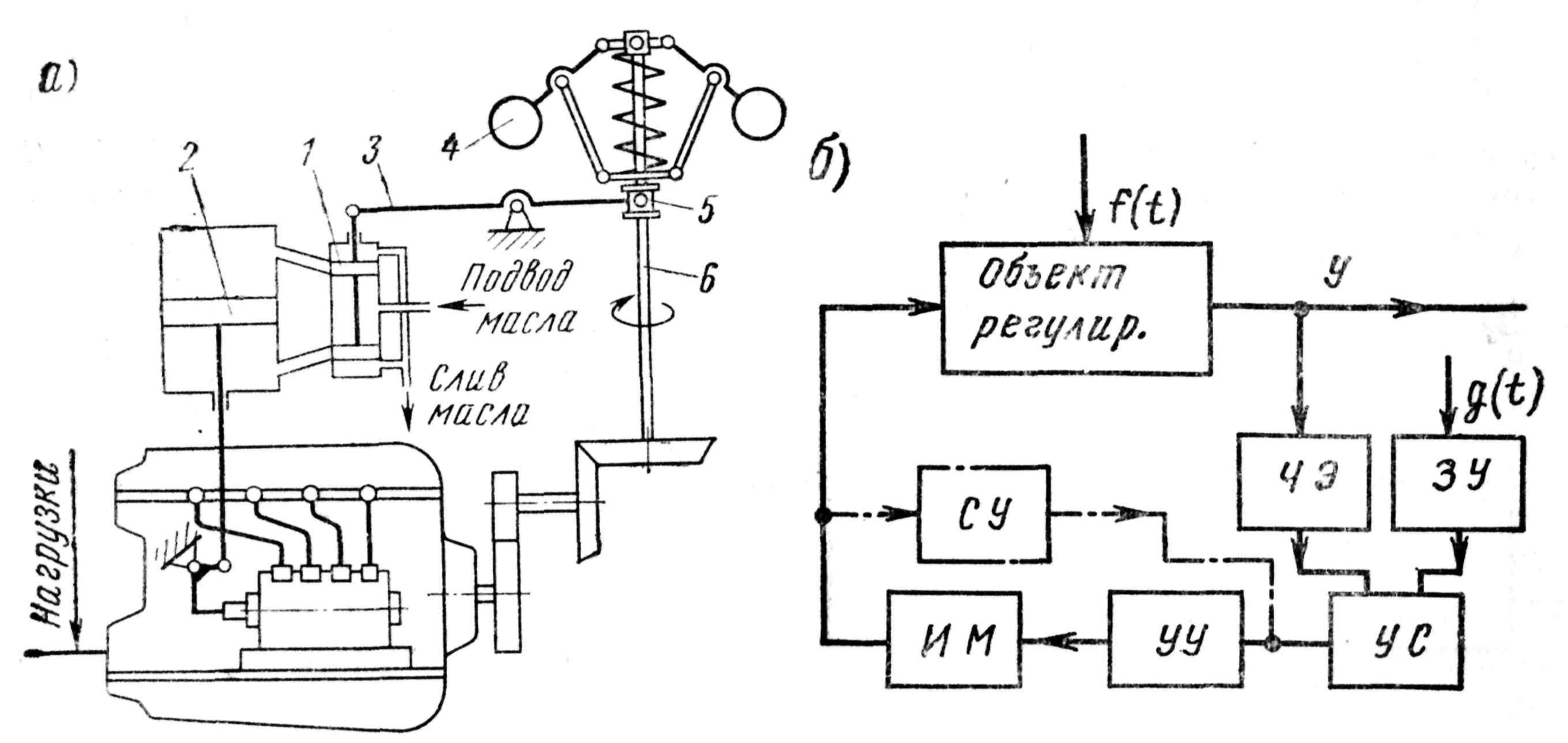
Рис. 39. Схемы САР частоты вращения вала дизель-генератора:
а — принципиальная; б — функциональная:
1 — золотник; 2 — поршень сервомотора; 3 — рычаг; 4 — грузы;
5 — муфта; 6 — вал регулятора;
СУ — корректирующее устройство; ЧЭ — чувствительный элемент;
ЗУ — задающее устройство; УС — устройство сравнения;
УУ — усилительное устройство; ИМ — исполнительный механизм;
f(t) — возмущающее воздействие; g(t) — управляющее воздействие
Решая систему (70), получим уравнение динамики замкнутой системы в операторной форме:
![]()
![]() .
(71)
.
(71)
Для этой же САР составим дифференциальное уравнение по передаточным функциям звеньев.
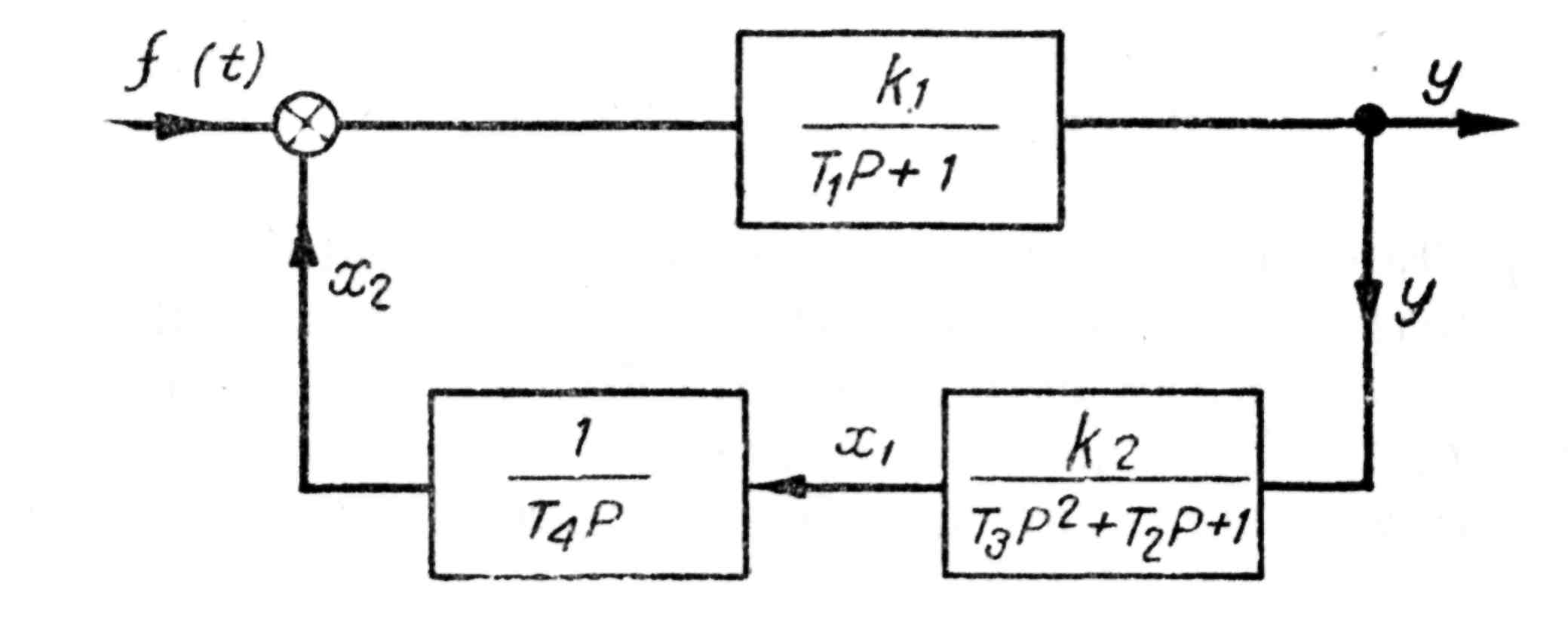
Рис. 40. Структурная схема САР частоты вращения
вала дизель-генератора
Для случая, когда возмущение приложено к объекту, передаточная функция замкнутой САР будет иметь выражение
![]() ,
,
где
(для нашего случая) ![]() —
передаточная функция объекта регулирования;
—
передаточная функция объекта регулирования;
![]() — передаточная
функция регулятора.
— передаточная
функция регулятора.
Тогда
![]() .
.
Отсюда уравнение динамики замкнутой системы
аналогично уравнению (71).
Вопросы для самоконтроля:
Дать понятие о передаточной функции и частотной характеристики.
Что представляет собой мгновенный импульс?
Уравнение динамики замкнутой системы.
Литература [2, 5, 6].