

3.3. Приемники gps.
Все приемники GPS, используемые в геодезических работах можно условно разделить на две большие группы. К первой группе относят приемники, работающие по принципу последовательного (поочередного) отслеживания и измерения расстояний до навигационных спутников. Ко второй группе – приемники, отслеживающие и обеспечивающие измерение расстояний одновременно до четырех и более навигационных спутников, т.е. ведущих измерения параллельно.
Внутри каждой из этих групп существует большое разнообразие GPS-приемников различного назначения и конструктивных особенностей.
Одноканальные приемники используют, когда не требуется вести работы в режиме «реального времени» (RTK). В этом случае одноканальный приемник должен выполнить последовательно четыре и более измерения до четырех и более спутников, при этом в ходе каждого цикла измерений приемник должен оставаться неподвижным, следовательно, такими приемниками нельзя производить измерения с подвижного объекта.
Двухканальные приемники работают по следующему принципу. Когда один канал приемника производит обработку результатов измерений до одного спутника, другой канал устанавливает радиоконтакт с очередным спутником для проведения измерений. Закончив цикл частичной обработки данных, первый канал переключается на измерения до очередного спутника без потери времени на его «захват». Тем временем второй канал, который называют «административным» обращается к следующему спутнику и т.д.
Административный канал используют для приема информационных сообщений спутников без прерывания процесса определения местоположения, для обработки временных измерений.
Многоканальные приемники (непрерывного слежения) одновременно отслеживают четыре и более спутников, их используют при производстве инженерно-геодезических работ, они могут иметь 4, 6, 8, 10, 12 и даже 24 канала, работают в режиме реального времени и могут обрабатывать сигналы спутников СНС NAVSTAR и ГЛОГАСС.
Кроме приемников (одноканальных и многоканальных), работающих на одной частоте радиоволн, в практике инженерно-геодезических работ используют многоканальные приемники, работающие с использованием кодов на двух частотах: 1575,72Mhz и 1227,6Mhz. Приемники такого вида обеспечивают более точное определение координат точек местности.
По точности определения координат и назначению различают приемники следующих классов:
- навигационного класса с точностью определения координат 150-200м;
- класса картографии и ГИС (геоинформационные системы) с точностью определения координат 1-5м;
- геодезического класса с точностью определения координат до 1см.
3.4. Концепция геодезических gps-измерений.
Для геодезических GPS измерений необходимо наблюдение одних и тех же четырех (или более) спутников, по крайней мере, двумя GPS приемниками. В настоящее время при выполнении геодезических работ используют два и более приемников.
В настоящем пособии рассмотрен принцип организации работ по определению местоположению точки на земной поверхности с использованием двух приемников; один из которых базовый «reference» приемник, второй – «ровер»-приемник.
Базовый приемник в течение всего процесса измерений располагают на пункте геодезической основы с известными координатами. «Ровер» перемещают по определяемым точкам, или он участвует в процессе выноса точек в натуру. Результатом объединения данных, полученным этими двумя приемниками, является пространственный вектор между базой и «ровером». Этот вектор называют базовой линией.
Положение пункта, на котором расположен второй приемник (передвижной или «ровер»), определяют по разности декартовых координат (X, Y, Z) между этими пунктами. Точность определения приращений такова, что обеспечивает измерение линии между приемниками (базовой линии) с погрешностью 5:30мм+(1-2)S*106 (в зависимости от типа аппаратуры и режима съемки), где S – расстояние между reference и rover станциями.
Для определения положения «ровера» относительно базы можно использовать различные методы измерений. Эти методы отличаются длительностью выполнения измерений. Для измерений в реальном времени используют радиомодем, который передает данные базы «роверу». Результаты получают непосредственно в поле. Методы измерений с постобработкой, требуют записи данных в поле и последующей их совместной обработки на офисном компьютере.
В основном выбор метода зависит от таких факторов, как конфигурация приемника, требуемая точность, ограничения по времени и необходимости получения результатов в реальном времени.
Измерительная станция спутниковой системы включает в себя приемник, блок управления, аккумуляторные батареи, зарядное устройство, штатив и соединительные кабели (рисунок 3.5). Приемник радиоизлучения является водонепроницаемым прибомассой около 2 кг. Он может одновременно отслеживать сигналы 6-12-ти ИСЗ на двух (L1 и L2) или одной (L1) несущих частотах.
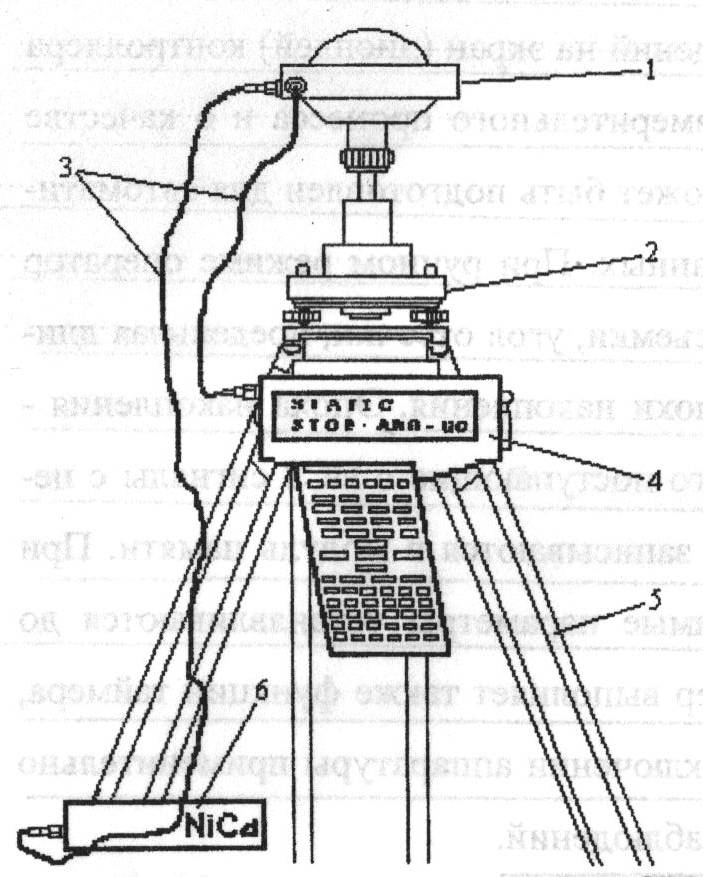
Рисунок 3.5. Общий вид измерительной GPS-станции (1 – приемник; 2 – трегер с адаптер; 3 – соединительные кабели; 4 – блок управления; 5 – штатив; 6 –аккумулятор)
Селекция спутников базируется на использовании граничной величины угла возвышения (угла отсечки) и качестве радиосигналов спутников. Угол отсечки при выполнении наблюдений устанавливается оператор. Автоматическое отслеживание спутников может быть заменено на ручное с исключением одного или нескольких ИСЗ из процесса измерений.
Приемник может устанавливаться на штативе, на легкой штанге или на местном предмете. Высота установки приемника на пункте наблюдения складывается из паспортной высоты расположения фазового центра антенны относительно основания приемника и измеряемой высоты над маркой пункта. Обе эти величины вводятся оператором в процессе измерений и из значения могут быть откорректированы при камеральной обработке. При высокоточных измерениях все приемники ориентируются в направлении Севера, что исключают эксцентриситет фазового центра антенны. Точность ориентирования должна составлять около 50.
Управление работой приемника производят с помощью контроллера или ПЭВМ. Приемник, контроллер и аккумуляторная батарея могут соединяться между собой кабелями в различных вариантах. Контроллер является блоком управления и обеспечивает взаимосвязь между оператором и приемником. Три основные функции контроллера заключается в управлении работой приемника, выбор режима съемки и регистрации принимаемой с ИСЗ информации. После начала наблюдений на экран контроллера выводится информация о состоянии измерительного процесса и о качестве регистрируемых данных. Контроллер может быть подготовлен для автоматического или ручного режимов ввода данных.
При ручном режиме оператор вводит целый ряд параметров – режим съемки, угол отсечки, предельная длина измеряемой линии, длительность эпохи накопления. Эпоха накопления – временной интервал, за период которого поступающие с ИСЗ сигналы с периодичностью 0,1 сек. усредняются и записываются в модуль памяти. При автоматическом режиме все необходимые параметры устанавливаются до начала процесса измерений. Контроллер выполняет также функции таймера, что необходимо при автоматическом включении аппаратуры применительно к заранее установленным интервалам наблюдений.
Процессор обеспечивает предварительную обработку измерительной информации и ее регистрацию, функционирование каналов связи, клавиатуры и дисплея контроллера. Клавиатура контроллера двухчастотных приемников аналогична клавиатуре ПЭВМ. В темное время суток дисплей может подсвечиваться.
Результаты измерений регистрируются на жесткую карту (модуль) памяти емкостью от 512Кб до 4 Мб, которая снабжена внутренним источником питания для обеспечения сохранности данных. Хранимые на карте памяти данные «перекачиваются» в ПЭВМ через контроллер или специальное устройство. По заполнению модуля памяти измерения автоматически прекращаются без потери накопленной информации. Информация о наличии свободной памяти и предупреждение о прекращении измерений выводится на дисплей автоматически. На место заполненной карты может быть установлена новая.
Для одновременного питания контроллера и приемника используют аккумулятор, который может закрепляться на штативе или удерживаться на плечевом ремне. Спутниковая аппаратура предназначена для работы в режимах «Статика», «Быстрая Статика», «Стою/Иду», «Кинематика» и «Реоккупация», а также для решения навигационных задач.
Статические съемки «Статика» подразумевают выполнение дифференциальных спутниковых наблюдений между двумя и более неподвижными приемниками, один из которых является базовым («reference»). Быстрые статические («Быстрая Статика») съемки увеличивают производительность измерений. На коротких линиях, каковыми являются стороны сетей сгущения, и при наблюдении, как минимум, четырех-пяти спутников с благоприятным взаимным геометрическим положением. Критерием этого является величина GDOP (у некоторых типов аппаратуры носит название PDOP) и высокое качество радиосигналов; фирмы гарантируют получение паспортной точности при продолжительностью наблюдений 5-10 минут.
Съемка в режиме «Стою/Иду») позволяет отнаблюдать большое количество пунктов (до 50-70 за смену), но требует, чтобы приемник удерживал захват спутников в течение всего времени перемещения между определяемыми пунктами. На первом пункте (пункт инициализации) необходимо находиться не менее 10 минут; время измерений на определяемых пунктах составляет от 5 до 30 сек. Указанный режим соответствует съемке объектов с расстояниями между определяемыми пунктами не более 300 м и отсутствием препятствий для прохождения радиосигналов от спутников.
Кинематическую съемку используют для определения координат (траектории) движущегося приемника относительно другого неподвижного сенсора. Режим работы «Реоккупация» может быть использован в тех случаях, когда приемник устойчиво принимает сигналы только от 2-х или 3-х спутников – при обработке указанных измерений результат не может быть получен. Оператор проводит измерения на определяемом пункте в течение 5 минут, затем не менее чем через 1,5 часа производятся повторные измерения той же длительности.