

Распознавание образов. Общие положения.
Цель курса: Принятие решений в условиях неполноты информации.
Задача будет решаться с помощью технических средств. Может быть осуществлено путем моделирования операций, выполняемых живыми организмами в процессе коммуникации и восприятия окружающего мира.
Наиболее удачно положить в основу модели способности человека в распознавании и реакции на окружающую действительность. Сегодня замена человека автоматом жизненно необходима, т.к. зачастую приходится решать задачи в опасных для жизни условиях.
После восприятия информации требуется, чтобы техническое устройство самостоятельно принимало решение на основе анализа им окружающей обстановки. Работа таких роботов становится эффективнее, если они могут адаптироваться к окружающей среде и управлять ситуацией.
Распознавание образов – совокупность методов и средств позволяющих достигнуть, а по возможности и превзойти естественные средства восприятия анализа окружающего мира живыми организмами.
Задачи на основе распознавания образов:
Распознавание речи, текстов, изображений
Автоматизация медицинской диагностики
Область криминалистики
Область космоса
Синхронный перевод текста
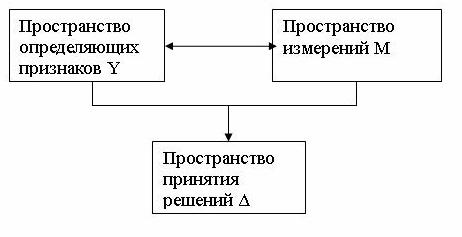
Процедуре распознавания предшествует восприятие информации, а результат распознавания используется для идентификации.
Объекты в распознавании образов
Решаемый круг задач относится к образам двух типов.
Этот тип образов опирается на реальные объекты, их изображения, или словесные описания
К этому типу относятся механизмы формирования понятий, которые могут быть отнесены к области искусственного интеллекта. Сюда входят мнения, пожелания и т.д.
Если рассматривать задачу распознавания в самом общем виде, то ее можно сформулировать как задачу разработки процедуры, позволяющей разбивать множество объектов на классы.
При этом подразумевается, что такое разбиение существует. Подобное утверждение в общем случае не верно, так как если с ним согласиться, то получается, что все и всегда можно формализовать.
Постановка задачи классификации:
Пусть
{F}
– множество объектов, Х – n-мерное
пространство признаков, где Х={x1,
x2…xn}.
Разбиение на классы можно считать
полностью завершенным, если для всех
Xi
(i=1,2…)
выполняется условие: ,
,
где Xi – совокупность разделения Х и задача заключается в отыскании функции f, которая обеспечивает это разделение, т.е f: X->П(Х).
П(Х) – подмножества Х.
Для решения задачи классификации необходимо найти разделяющую функцию f такую, которая позволит разделить с условием полной сепарабельности (разделимости) все множество объектов на непересекающиеся классы.
Множество С: С={c1, c2 …cp} – совокупность признаков объекта.
Практически используются не все признаки, а лишь те, которые отражают существенные особенности объектов.
Существенные признаки образуют сокращенное множество Y, отличное от множества С: |Y| < =|C| Y={y1, y2… ym}.
Классификация объектов. Понятие расстояния между объектами.
Пример:
{F} – пять треугольников
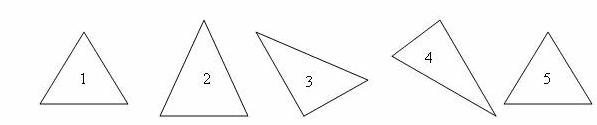
Y={y1, y2, y3} – длины сторон. Измерив длины, получаем М
М1= {2, 2, 2}, М2= {1, 2, 1.5}, М3= {2, 3, 1.5}, М4= {1, 3.5, 4}, М5= {2, 2, 1}.
В результате получаем три класса объектов: С1 – равносторонние треугольники; С2 – равнобедренные треугольники; С3 – остальные треугольники. Расстояние между объектами – средство оценки того, насколько схожи между собой 2 образца, т.е. расстояние, определяет степень сходства образцов.
Для определения этого понятия было предложено множество математических выражений. Это связано со многими причинами: спецификой решаемых задач, используемыми техническими средствами.
Уточним
это понятие для случая метрического
пространства Х. Будем называть расстоянием
между точкой
 и классом
и классом
 величину d1, определяемую выражением
величину d1, определяемую выражением

inf = min;
Расстояние
между 2-мя классами
 и
и
 определяется величиной d2
определяется величиной d2

d1
– Евклидово расстояние,
d2
– расстояние по Манхэттену,

d3
– Чебышевское расстояние,

 – векторы,
между которыми оценивается расстояние,
– векторы,
между которыми оценивается расстояние,
 – к-ая составляющая вектора Хi.
– к-ая составляющая вектора Хi.