

Особенности применения частотного метода в радиовысотомерах.
Рис.21
Основными характеристиками радиовысотомера являются пределы и точность измерения частоты и вертикальной скорости.
Непрерывное излучение ЧМ сигнала используется частотомером для измерения малых высот. Для больших высот используется импульсный метод.
А – центр эффективного отражения сигнала.
Значение высоты определяется:


H0 – высота над уровнем моря,
Hp – высота рельефа.
Частотный метод позволяет измерять и дальность и вертикальную скорость.
Измерение путевой скорости и угла сноса. Однолучевая измерительная система.
Рис.22
Спектр принимаемых Доплеровских приращений (из-за различного угла визирования):
Рис.23



Sin(α0/2)=π/2 так как α мало.
Для измерения путевой скорости нужно измерить среднее значение Доплеровского приращения.
Угол сноса – угол между направлением вектора путевой скорости летательного аппарата и его продольной осью.
Рис.24
Однолучевая система широко не используется, поскольку:
Низкая точность
Влияние ошибки изменения Доплеровского приращения
Погрешность оценки угла визирования (обусловлена креном)

Крен – наклон в поперечной плоскости.
Рис.25
Тангаж – наклон в продольной плоскости.
Рис.26
Для исключения ошибки крена и тонгажа используется односторонняя 2-лучевая система измерения.
2-лучевая измерительная система.
Рис.27
Нужно довернуть нашу антенну до того момента, чтобы ось антенны совпала с вектором скорости. Угол, на который мы довернули антенну, будет равен углу сноса.
2-стороннее излучение вперед и назад.
Доплеровские приращения:
Рис.28
β – угол визирования.
Δβ2 – ошибка угла визирования.
4-лучевая навигационная система.
Рис.29
Изменение угла сноса будет пропорционально разности средних значений разности пар доплеровских приращений:
Путевая скорость пропорциональна:
4-лучевая система измерения широко используется при посадке. Используется при посадке летательного аппарата на другие планеты и посадке самолетов с вертикальным взлётом.
Виды обзора пространства и их характеристики.
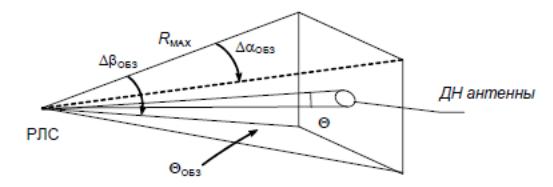
Рис.30

υ – телесный угол ДН.
Скорость вращения антенны:

αа – ширина ДН в азимутальной плоскости.

Период повторения зондирующих сигналов должен быть больше времени их запаздывания.
Время кругового обзора:

Время секторного обзора:

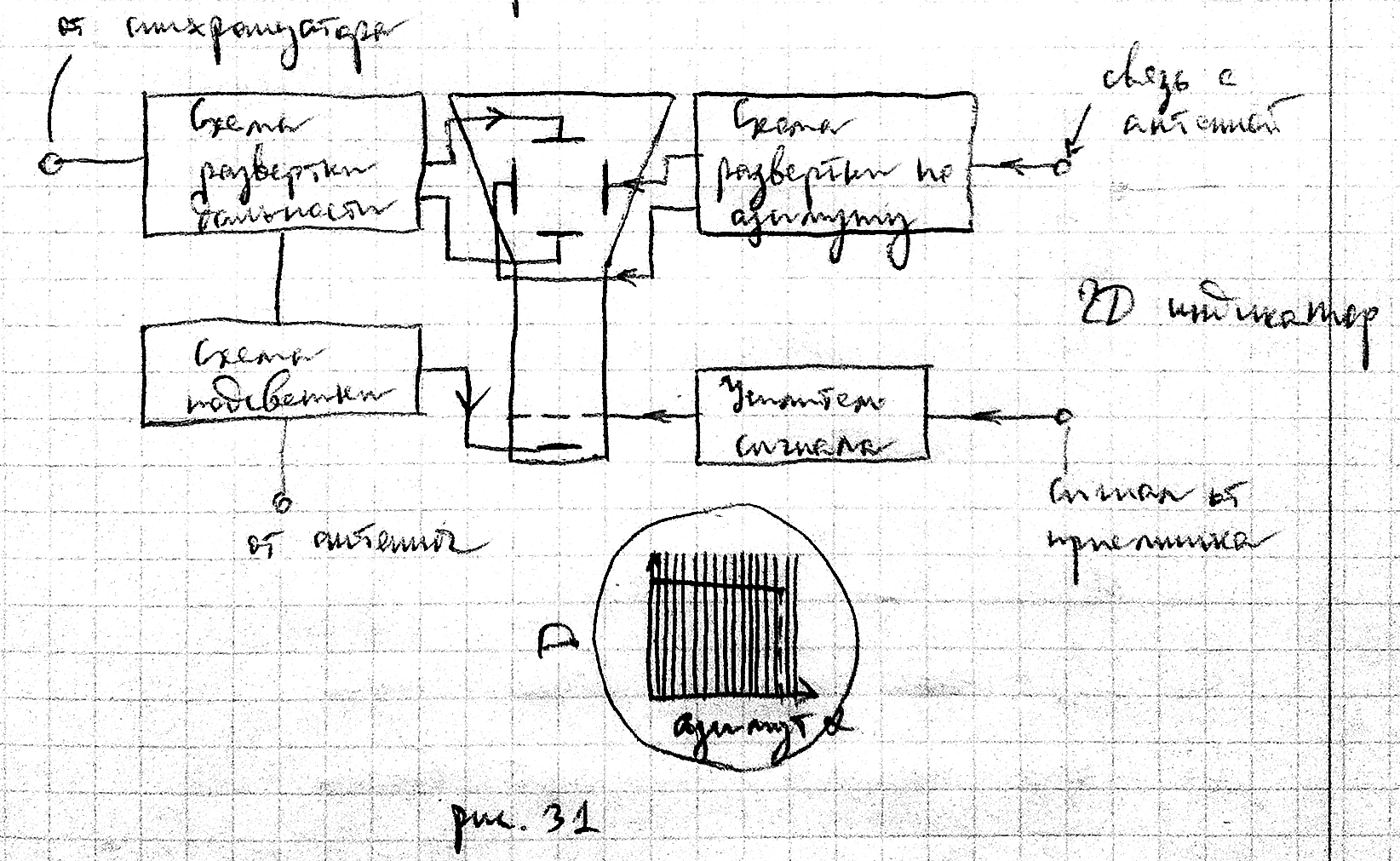
Рис.31
2D индикатор измеряет дальность и азимут.
 Рис.32
Рис.32
Обеспечение условий синфазности и синхронности позволяет получить однозначное соответствие между объектом и изображением на индикаторе.
Качество фокусировки – отношение диаметра экрана к диаметру пятна.

Рис.33
dпкм – цена пятна в километрах.
Чем дальше от центра индикатора находится отметка, тем точнее определяется значение азимута.
Чем меньше цена пятна, тем меньше погрешность при измерении.
Винтовой обзор.
V – обзор.

Недостаток: если цели 2, то возникает неоднозначность оценки.
ПРОПУЩЕНА ЛЕКЦИЯ.
Влияние подстилающей поверхности.
 Фото
75
Фото
75
Если половина ширины ДН по уровню половинной мощности φ0,5 больше, чем угол места β0, то в точке приема будет сигнал, отраженный от цели и от земной поверхности => интерференция двух сигналов на приеме, может наблюдаться провал ДН.
Для борьбы с этим эффектом площадку по антенной закатывают асфальтом и меняют поляризацию.