

МОДУЛЬ 1.СТРУКТУРА МЕТАЛЛОРЕЖУЩИХ СТАНКОВ С ЧПУ.
1.1. Комплекс «Станок с чпу».
В общем виде структуру комплекса «станок с ЧПУ» можно представить в виде трех блоков, каждый из которых выполняет свою задачу: управляющая программа (УП), устройство ЧПУ (УЧПУ) и собственно станок (рис. 1.1.1).
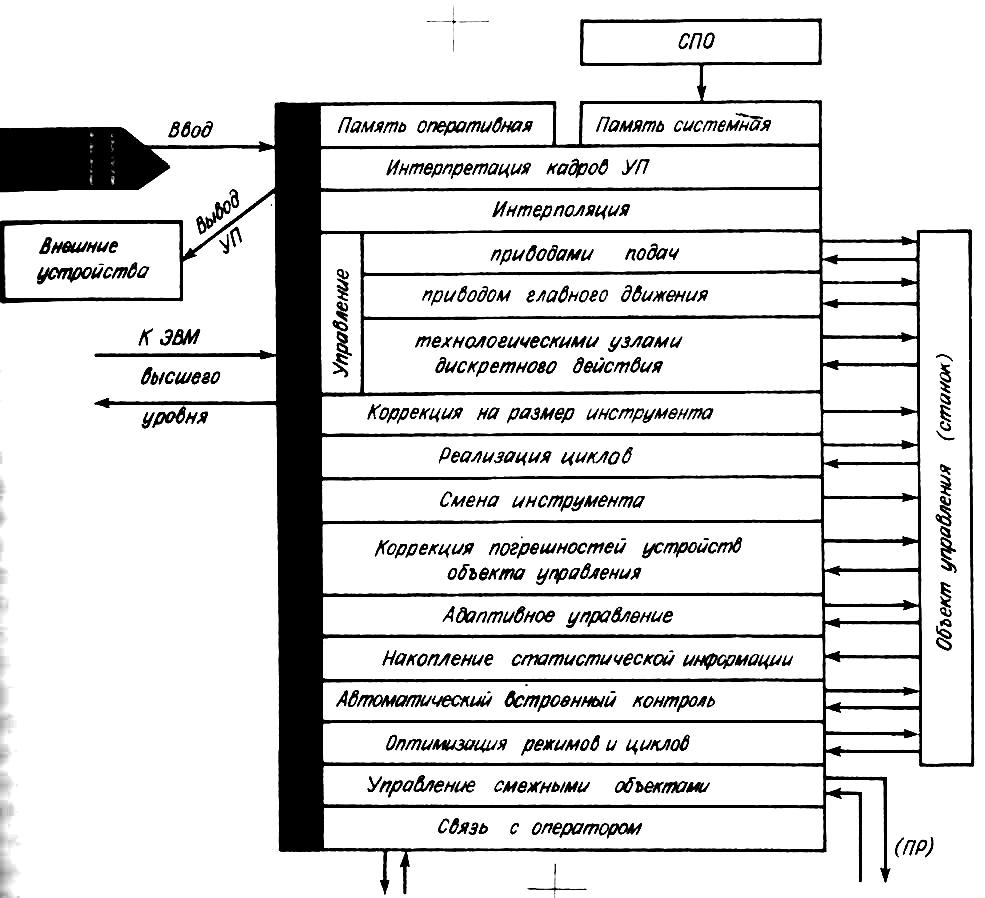
Рис. 1.1.1.Функциональная схема управления станком с ЧПУ
Управляющая программа содержит укрупненное кодированное описание всех стадий геометрического и технологического образования изделия. Главное (с информационной точки зрения) в этом описании то, что оно не допускает двусмысленных трактований.
В УЧПУ управляющая информация в соответствии с УП транслируется, а затем используется в вычислительном цикле, результатом которого является формирование оперативных команд в реальном масштабе машинного времени станка.
Станок является основным потребителем управляющей информации, исполнительной частью, объектом управления, а в конструктивном отношении — несущей конструкцией, на которой смонтированы механизмы с автоматическим управлением, приспособленные к приему оперативных команд от УЧПУ. К числу подобных механизмов относятся, прежде всего те, которые непосредственно участвуют в геометрическом формообразовании
-2-
изделия. Это механизмы координатных подач, направления которых различны.
В зависимости от числа координат движения, реализуемых механизмами подачи, складывается та или иная система координат обработки: плоская, пространственная трехмерная, пространственная многомерная. Из всех механизмов, механизмы подачи требуют в процессе управления наибольшего объема переработки информации и вычисления, поэтому от числа управляемых координат, от сложности геометрической координатной задачи формообразования во многом зависит сложность УЧПУ в целом и используемая методика программирования.
Функциональность реальной системы ЧПУ (СЧПУ) определяется степенью реализации целого ряда функций при управлении оборудованием. Краткая характеристика этих функций:
Ввод и хранение системного программного обеспечения (СПО). К СПО относят совокупность программ, отражающих алгоритмы функционирования конкретного объекта. В системах, обеспечивающих управление широким классом объектов (в так называемых многоцелевых СЧПУ), при настройке СЧПУ для решения определенного круга задач СПО вводится изготовителем в энергонезависимую память УЧПУ и как правило дается его копия в машинных кодах на случай замены плат при ремонте в памяти которых оно записано. СПО соответствует конкретно к заказываемой системе ЧПУ или универсальным для группы УЧПУ.
В УЧПУ СПО вводится с дискеты, диска или флэш-памяти через канал USB или по каналу связи с ЭВМ верхнего уровня.
Необходимо различать СПО, программы логики, так называемые программы PLC, и управляющие программы (УП): СПО остается неизменным для данного объекта управления, программы логики разрабатываются программистами при первом вводе станка в эксплуатацию, а УП разрабатываются и изменяются инженерами-программистами или операторами станков с ЧПУ при изготовлении разных деталей на одном и том же объекте. В многоцелевых СЧПУ память для хранения СПО должна быть энергонезависимой, т. е. сохранять информацию при пропадании напряжения питающей сети.
Ввод и хранение УП. Управляющая программа может вводиться в СЧПУ с перфоленты в старых моделях станков, с дискеты, флэш-памяти через USB порт, вручную с пульта управления или по каналам связи с ЭВМ высшего уровня. Память для хранения УП в современных УЧПУ - энергонезависимая.
В современных системах введенная УП после отладки и редактирования с использованием УЧПУ может быть выведена на какие-либо внешние устройства: дискету, флэш-память, автоматическое печатающее устройство, в память ЭВМ верхнего уровня. Интерпретация кадра. Управляющая программа состоит из составных частей — кадров. Отработка очередного кадра требует проведения
-3-
ряда предварительных процедур, называемых интерпретацией кадра. Иначе говоря, система управления должна быть готова к немедленной (без перерывов на чтение и распознавание кадров) выдаче команд управления в соответствии с командами последующего кадра после исполнения команд, заложенных в кадре текущем.
Интерполяция. СЧПУ должна обеспечить с требуемой точностью автоматическое получение (расчет) координат промежуточных точек траектории движения элементов управляемого объекта по координатам крайних точек и заданной функции интерполяции.
Управление приводами подач. В общем случае задача сводится к организации цифровых позиционных следящих систем для каждой координаты. Оно может быть аналоговым(+/- 10в), частотно-импульсным и цифровым. На вход следящей системы поступают коды, соответствующие результатам интерполяции. Определение действительного положения перемещающегося объекта и сообщение о нем в систему управления осуществляются датчиками обратной связи (ДОС). Кроме управления в режиме движения по заданной траектории необходима организация и некоторых вспомогательных режимов: установка системы приводов в абсолютный нуль станка, контроль выхода за допустимые значения координат, автоматический выход приводов режим торможения по определенным законам и др.
Управление приводом главного движения. Управление предусматривает включение и отключение главного привода, стабилизацию скорости, а в некоторых станках управление угловой ориентацией шпинделя, например, в станках с автоматической сменой инструмента.
Логическое управление(.PLC) Это управление технологическими узлами дискретного действия, выходные сигналы которых производят операции типа «включить», отключить», например, охлаждение, а входные фиксируют состояния «включено», «отключено», все вспомогательные движения узлов и механизмов.
Коррекция на размеры инструмента. Коррекция УП на длину инструмента сводится к параллельному переносу координат. т. е. смещению. Учет фактического радиуса инструмента сводится к формированию траектории, запрограммированной эквидистантой.
Реализация циклов. Выделение повторяющихся (стандартных) участков программы, называемых циклами, является эффективным методом сокращения УП. Так называемые фиксированные циклы характерны для определенных технологических операций (сверления, зенкерования, растачивания, нарезания резьбы и т. п.) и встречаются при изготовлении многих изделий.
При разработке УП фиксированные циклы указываются в программе, а их отработка ведется в соответствии с определенной подпрограммой, заложенной в память СЧПУ системой программного обеспечения или конструктивной схемой.
-4-
Программные технологические циклы соответствуют повторяющимся участкам данной обрабатываемой детали. Эти циклы в современных СЧПУ являются частью СПО и занесены в энергонезависимую память СЧПУ.
Смена инструмента. Эта функция характерна для многоинструментальных и многоцелевых станков. Задача смены инструмента в общем случае имеет две фазы: поиск гнезда магазина с требуемым инструментом, угловая ориентация шпинделя и замену отработавшего инструмента на новый. Эта функция реализуется путем программирования РLC интерфейса (логики) при первом вводе станка в эксплуатацию инженерами программистами.
Коррекция погрешностей механических и измерительных устройств. Любой конкретный агрегат механообработки (т. е. объект управления) можно аттестовать с помощью измерительных средств достаточно высокого класса точности. Результаты такой аттестации в виде таблиц погрешностей (внутришаговая ошибка, накопленная ошибка, люфты, температурные погрешности) заносятся в память СЧПУ. При работе системы текущие показания датчиков агрегатов корректируются данными из таблиц погрешностей. Эта функция в современных СЧПУ являются частью СПО и занесена в энергонезависимую память СЧПУ. Может выполняется специалистами при вводе в эксплуатацию при необходимости.
Адаптивное управление механообработкой. Для осуществления такого управления необходимая информация, получается, от специально установленных датчиков, с помощью которых измеряют момент сопротивления резанию или составляющие сил резания, мощность привода главного движения, вибрацию, температуру, износ инструмента и др. Чаще всего адаптация осуществляется изменением контурной скорости или скорости привода главного движения. Как правило, эти функции СЧПУ имеются при специальном заказе.
Накопление статистической информации. К статистической информации относятся, фиксация текущего времени и времени работы системы и ее отдельных узлов, определение коэффициента загрузки оборудования, учет изготовленной продукции, фиксация ее отдельных параметров и т. д.
Дополнительные функции. К дополнительным функциям можно отнести следующие: обмен информацией с ЭВМ верхнего уровня, согласованное управление оборудованием технологического модуля, управление элементами автоматической транспортно-складской системы, управление внешними устройствами, связь с оператором, техническую диагностику технологического оборудования и самой системы ЧПУ, оптимизацию отдельных режимов и циклов технологического процесса и др.
-5-