

40Структура и классификация кинематических пар.
Классификация кинематических пар проводится по числу наложенных связей:
S=1, W=5 — кинематическая пара 1 класса
S=2, W=4 — кинематическая пара 2 класса
S=3, W=3 — кинематическая пара 3 класса
S=4, W=2 — кинематическая пара 4 класса
S=5, W=1 — кинематическая пара 5 класса
Классификация кинематических пар:
2) по относительному движению звеньев, образующих пару:
- вращательные;
![]()
- поступательные;
![]()
- цилиндрические;
![]()
- сферические;
![]()
- винтовые;
- плоские.
) по виду места контакта (места связи) поверхностей звеньев:
- низшие, в которых контакт звеньев осуществляется по плоскости или поверхности (пары скольжения);
- высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием). Они имеются, например, в зубчатых и кулачковых механизмах).

41Кинематические цепи и их классификация.
Кинематическая цепь-Несколько звеньев, соединённых между собой кинематическими парами,
Кинематические цепи бывают:
- замкнутые (простые). В замкнутой цепи каждое звено входит не менее, чем две кинематические пары.
- разомкнутые (простые).
![]()
- сложные.
42) Механизм. Структурна формула механизма
Уравнение,
связывающее число степеней свободы
кинематической цепи с числом ее звеньев,
числом и видом кинематических пар
называется структурной
формулой.Число
степеней свободы механизма относительно
звена, принятого за стойку, называется
степенью
подвижности механизма.
Степень подвижности пространственных
механизмов применяется формула Сомова-
Малышева![]() w =
6n –
5p5 –
4p4 –
3p3 –
2p2 – p1 . где
n – число подвижных звеньев механизма;
pi –
число кинематических пар, подвижность
которых равна i.Для
плоских механизмов применяется
структурная формула Чебышева
w =
6n –
5p5 –
4p4 –
3p3 –
2p2 – p1 . где
n – число подвижных звеньев механизма;
pi –
число кинематических пар, подвижность
которых равна i.Для
плоских механизмов применяется
структурная формула Чебышева
w = 3n – 2p5 – p4 . Обобщенные координаты механизма перемещений, совпадает с числом обобщенных координат. Механизм – замкнутая кинем. Цепь с 1 неподвиж. Звеном, обладающая вполне опр. Движением при заданном движении 1 или неск. Звеньев.
Если механизм обладает 1 степенью свободы, то одному из звеньев можно предписать относительно стойки какой-либо вполне определенный закон движения (одну обобщенную координату механизма), например, вращательное, поступательное или винтовое движение. При этом все остальные подвижные звенья получают вполне определенные движения, являющиеся функциями заданного. Если механизм имеет две степени свободы, то необходимо либо одному из звеньев задать два независимых движения относительно стойки, либо двум звеньям по одному независимому движению и т.д. Звенья (звено), которым приписываются обобщенные координаты, называются начальными (начальным).
Пусть кинематическая цепь, образующая механизм, имеет п звеньев. Закрепив одно звено, образуем стойку, тогда число степеней свободы механизма, т.е. число степеней - это независимые между собой координаты, определяющие положения всех звеньев механизма относительно стоики. В механизмах с голономными связями число степеней свободы, т.е. число независимых возможных
свободы, его подвижной кинематической цепи относительно стойки определиться по формуле Чебышева w = 3n – 2p5 – p4=3(n-1)-2p5-p4; n1=(n-1)-число подвиж. ЗвеньевПример. Определить w для механизма
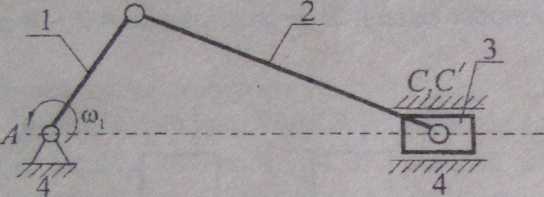 вид
и число кинематических пар:А
(1,4) - вращательная пара,
В
(1>2) - вращательная пара,С (2,3) - вращательная
пара,С'(3,4) - поступательная пара.Таким
образом п
= 4; n1=
3; р5
= 4; р4
= 0. w
=3п
-2р5
- р4
= 3* 3- 2*4-0
= 1.
вид
и число кинематических пар:А
(1,4) - вращательная пара,
В
(1>2) - вращательная пара,С (2,3) - вращательная
пара,С'(3,4) - поступательная пара.Таким
образом п
= 4; n1=
3; р5
= 4; р4
= 0. w
=3п
-2р5
- р4
= 3* 3- 2*4-0
= 1.