

50Обзор основных видов механизмов.
Шарнирно-рычажные механизмы Механизмы, в состав которых входят жесткие звенья, соединенные между собой вращательными и поступательными парами, наз. Кривошипно-рычажными ( механизмы с низшими парами). Простейшим, наиболее распространенным го этого типа механизмов является шарнирный четырехзвенник (рис. В.1,а).
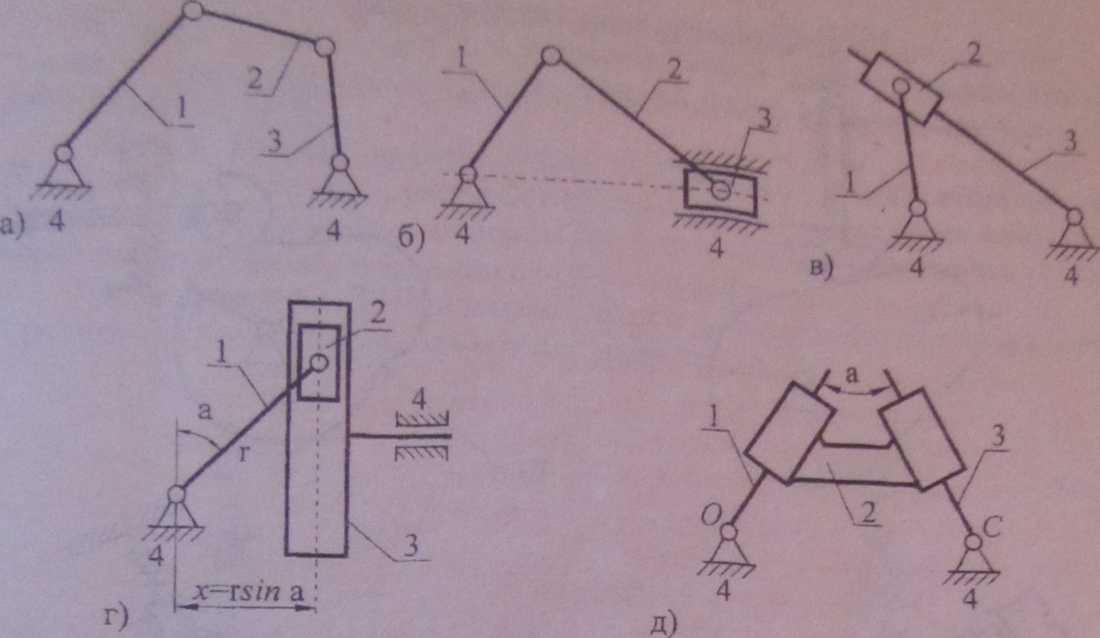
Частным случаем шарнирного четырехзвенника являются кривошипно-ползунный механизм .(рис. В. 1,6) и кулисный механизм (рис. В.1,в), служащий для передачи вращательного движения от звена 1 звену 3.
На рис. B.lr изображен механизм двойного ползуна.На рис. В.1,д изображен двухкулисный механизм.
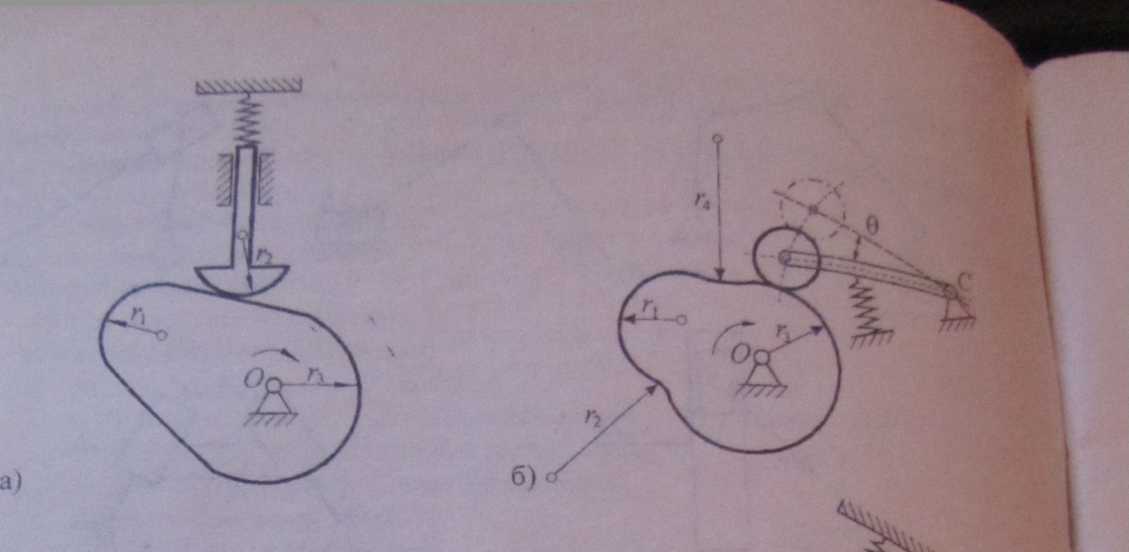
В кулачковом механизме кулачок, воздействуя на толкатель, сообщает ему требуемое движение. Все кулачковые механизмы могут быть разделены на 2 основные группы: пространственные и плоские. В зависимости от характера движения кулачка и толкателя возможны следующие случаи:
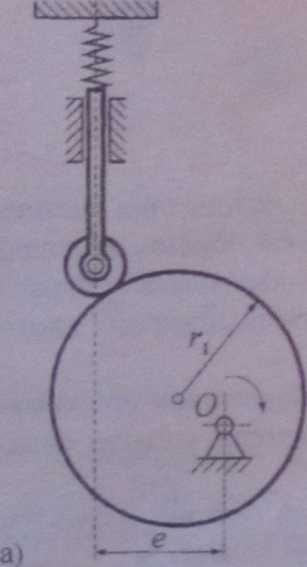
-вращательное движение кулачка преобразуется в возвратнопоступательное движение толкателя (рис. В.2,а);
- вращательное движение кулачка преобразуется во вращательное движение толкателя; однако толкатель не совершает полного оборота, а только поворачивается на некоторый угол (размах толкателя) и затем возвращается обратно (рис. В.2,б);
Различают
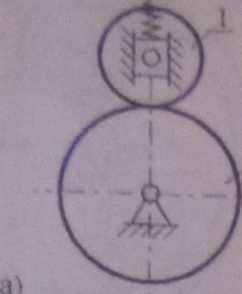
осевые
механизмы (рис. В.3,а)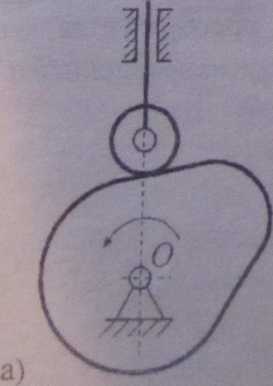
 и
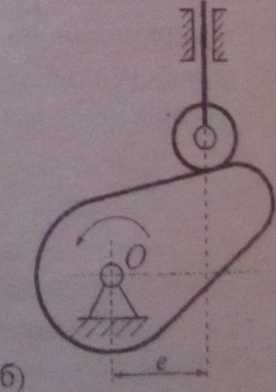
внеосевые (рис. В.3,6). Для внеосевых
механизмов необходимо на чертеже
отметить величину несоосносгя - е.
Такое деление производится в зависимости
от того, проходит или не проходит
направление
движения центра ролика или грибка через
центр вращения кулачка.
и
внеосевые (рис. В.3,6). Для внеосевых
механизмов необходимо на чертеже
отметить величину несоосносгя - е.
Такое деление производится в зависимости
от того, проходит или не проходит
направление
движения центра ролика или грибка через
центр вращения кулачка.
По характеру очертания профиля кулачка различают:
профиль кулачка очерчен окружностью определенного радиуса, ось вращения не проходит через его геометрический центр. Кулачок называется эксцентриком (рис. В.4,а);
-
профиль кулачка очерчен дугами окружностей
4 радиусов (рис. В.4,б)
-
профиль кулачка очерчен плавной кривой.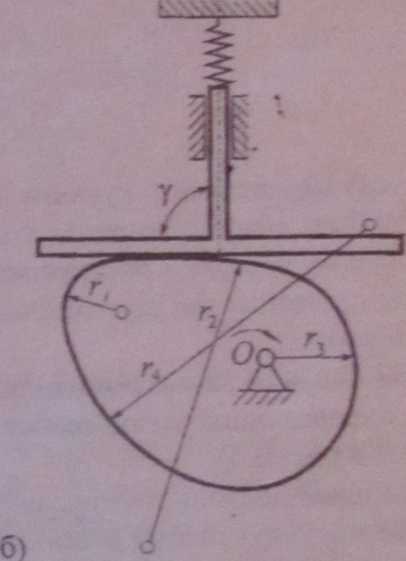
По профилю толкателя различают:
-профиль толкателя очерчен дугой одного радиуса
- профиль толкателя очерчен по прямой линии;
-профиль толкателя выполнен в виде
По виду замыкания кинематической пары различают: кулачковые механизмы с геометрическим и силовым замыканием. Кинематическое замыкание обеспечивается введением дополнительной (избыточной связи), которая не накладывает новых ограничении на относительное движение звеньев. Основное достоинство кулачковых механизмов - позволяют получить любой заданный закон движения толкателя.
Простейшим механизмом, осуществляющим передачу вращения между валами, является механизм с фрикционными катками (рис. В.6,а).
 Катки
прижимаются друг к другу своими рабочими
поверхностями с целью вызвать между
ними трение, обеспечивающее качение
одного катка по другому. В
зубчатых механизмах
передача движения между валами
осуществляется с помощью колес,
закрепленных на валах и снабженных на
ободе зубьями. В зубчатой передаче
замыкание высшей пары производится
силой давления зуба на зуб. Передаточным
отношением
в зубчатой передаче называется отношение
угловых скоростей двух звеньев механизма.
Передачи
могут
быть с постоянным передаточным отношением
и с переменным передаточным отношением.
В 1 случае форма колеса выполнена в виде
простых тел вращения. Во 2 случае форма
колеса некруглая (эллиптическая,
сердцевидная и т. п.). Также
есть винтовые и клинчатые механизмы,
механизмы с жидкими и гибкими завеньями.
Катки
прижимаются друг к другу своими рабочими
поверхностями с целью вызвать между
ними трение, обеспечивающее качение
одного катка по другому. В
зубчатых механизмах
передача движения между валами
осуществляется с помощью колес,
закрепленных на валах и снабженных на
ободе зубьями. В зубчатой передаче
замыкание высшей пары производится
силой давления зуба на зуб. Передаточным
отношением
в зубчатой передаче называется отношение
угловых скоростей двух звеньев механизма.
Передачи
могут
быть с постоянным передаточным отношением
и с переменным передаточным отношением.
В 1 случае форма колеса выполнена в виде
простых тел вращения. Во 2 случае форма
колеса некруглая (эллиптическая,
сердцевидная и т. п.). Также
есть винтовые и клинчатые механизмы,
механизмы с жидкими и гибкими завеньями.