

Питання для самоперевірки:
Що таке механічний рух? Що вивчає статика?
Що вивчає теоретична механіка? Задачі статики.
В чому полягає суть понять матеріальна точка та абсолютно тверде тіло?
Що таке сила? Які три характеристики має сила?
Що таке система сил?
Що таке еквівалентна система сил?
Яка сила є рівнодійною системи сил?
Як формулюються аксіоми статики?
В якому випадку матеріальне тіло буде вільним?
Як зображується рівнодійна двох сил, які прикладені до тіла в одній точці?
Сформулюйте теорему про три непаралельні сили.
Висновок по темі: При розв'язанні задач слід дотримуватися наступної послідовності:
Визначити тіло, рівновагу якого слід розглянути в даній задачі.
Показати на рисунку всі активні сили, які діють на вибране тіло.
Звільнити від в'язей вибране тіло і замінити їх дію силами реакцій в'язей. Зобразити у вигляді векторів усі сили реакцій відкинутих в'язей.
Скласти рівняння, яке б виражало умови рівноваги тіла. Тип цих рівнянь визначається характером сил, що діють на тіло.
Зокрема, при розв'язуванні задач з теми "Плоска система збіжних сил" з використанням геометричної умови рівноваги необхідно побудувати замкнутий силовий трикутник. Його побудову необхідно починати з відомої сили, далі за відомими елементами трикутника знайти невідомі величини. Якщо силовий трикутник косокутній, то при розв'язуванні корисно використати теорему синусів, але інколи доцільним є використання умови пропорціональності сторін двох подібних трикутників (силового трикутника і трикутника за основним рисунком).
1.2. Теорія моментів сил
Під час вивчення даної теми необхідно ознайомитись з проекцією сили на вісь і на площину, приведенням збіжних сил до рівнодійної і умовою рівноваги системи збіжних сил.
Вивчити теорію моментів сил: момент сили відносно точки, поняття пари сил, момент пари сил.
Опрацювати приклад розв’язання задач з використанням рівнянь рівноваги системи збіжних сил.
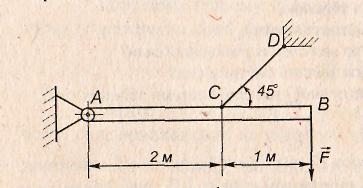
Завдання: Балка АВ підтримується в горизонтальному положенні стержнем СD. Закріплення в точках А, С, D – шарнірні.
Визначити реакції шарніра А і стержня СD, якщо на кінці балки діє вертикальна сила = 5кН. Розміри вказані на рис. Вагою балки нехтуємо.
Розглянемо рівновагу балки АВ.
Показуємо активну силу .
Звільняємо балку від в’язей. В’язями є шарнір А і стержень DC. Дію в’язей заміняємо реакціями. Реакція стержня DC направлена вздовж стержня. Напрям реакції шарніра А знаходимо виходячи з умови, що лінії дії сили , реакції шарніра А і стержня DC перетинаються в одній точці.
Вибираємо осі координат як вказано на рис.

На балку діє плоска система збіжних сил. Складемо рівняння рівноваги:
∑ Fіх = 0; – RA· cosα + Rc· cos 45o = 0;
∑ Fіу = 0; – F – RA· sinα + Rc· sin 45o = 0.
Звідси:
RA = F/ cosα – sinα; Rc = F· √2 cosα / cosα – sinα.
Оскільки
sinα = 1/√10; cosα = 3/ /√10,
то
RA = 7,9 кН, а Rc = 10,6 кН.
Дана тема найкраще висвітлена у навчальному посібнику: В.В. Цасюк Теоретична механіка. –Львів: Афіша, 2003. Стор 20 – 36.
Теоретичні відомості
Теорія моментів сил
1. Проекція сили на вісь і площину.
2. Приведення збіжних сил до рівнодійної.
3. Теорія моментів сил.
Література
В.В. Цасюк Теоретична механіка. –Львів: Афіша, 2003.
Е.М. Нікітін Теоретична механіка. – М: Наука, 1983.
1. Проекція сили на вісь і площину.
Уявимо
силу
![]() ,
вектор якої довільно розташований у
площині креслення (рис. 1.8). Виберемо
у цій площині вісь, наприклад, вісь
,
вектор якої довільно розташований у
площині креслення (рис. 1.8). Виберемо
у цій площині вісь, наприклад, вісь
![]() .
Необхідно спроектувати вказану силу
.
Необхідно спроектувати вказану силу
![]() на дану вісь
.
на дану вісь
.

Рис. 1.8
Позначимо
спочатку кінці вектора сили
літерами
і
і опустимо з них на вісь
перпендикуляри. Точки перетину
перпендикулярів з віссю
(позначимо їх відповідними малими
буквами
![]() і
і
![]() )
утворили на осі
напрямлений відрізок, який і буде
проекцією сили
на вісь
.
За величиною цей відрізок дорівнює
добутку модуля сили
)
утворили на осі
напрямлений відрізок, який і буде
проекцією сили
на вісь
.
За величиною цей відрізок дорівнює
добутку модуля сили
![]() на косинус кута, під яким вектор сили
перетинає вісь. А саме:
на косинус кута, під яким вектор сили
перетинає вісь. А саме:
![]() . (1.4)
. (1.4)
За
знаком проекція сили на вісь тоді буде
додатня, коли кут
(кут перетину вектора сили або лінії
дії сили з віссю) гострий. Цілком
зрозуміло, якщо цей кут дорівнює
![]() ,
то проекція сили
на вісь
дорівнюватиме нулю. Якщо кут
буде тупий, то проекція сили
,
то проекція сили
на вісь
дорівнюватиме нулю. Якщо кут
буде тупий, то проекція сили
![]() на вісь
буде мати від'ємний знак.
на вісь
буде мати від'ємний знак.
Таким чином, проекція сили на вісь – це напрямлений відрізок на осі, утворений між перпендикулярами, які опущені з кінців вектора сили на вісь, і який за величиною дорівнює добутку модуля сили на косинус кута між напрямом вектора сили та віссю.
Спроектуємо тепер вектор сили на площину і осі координат.
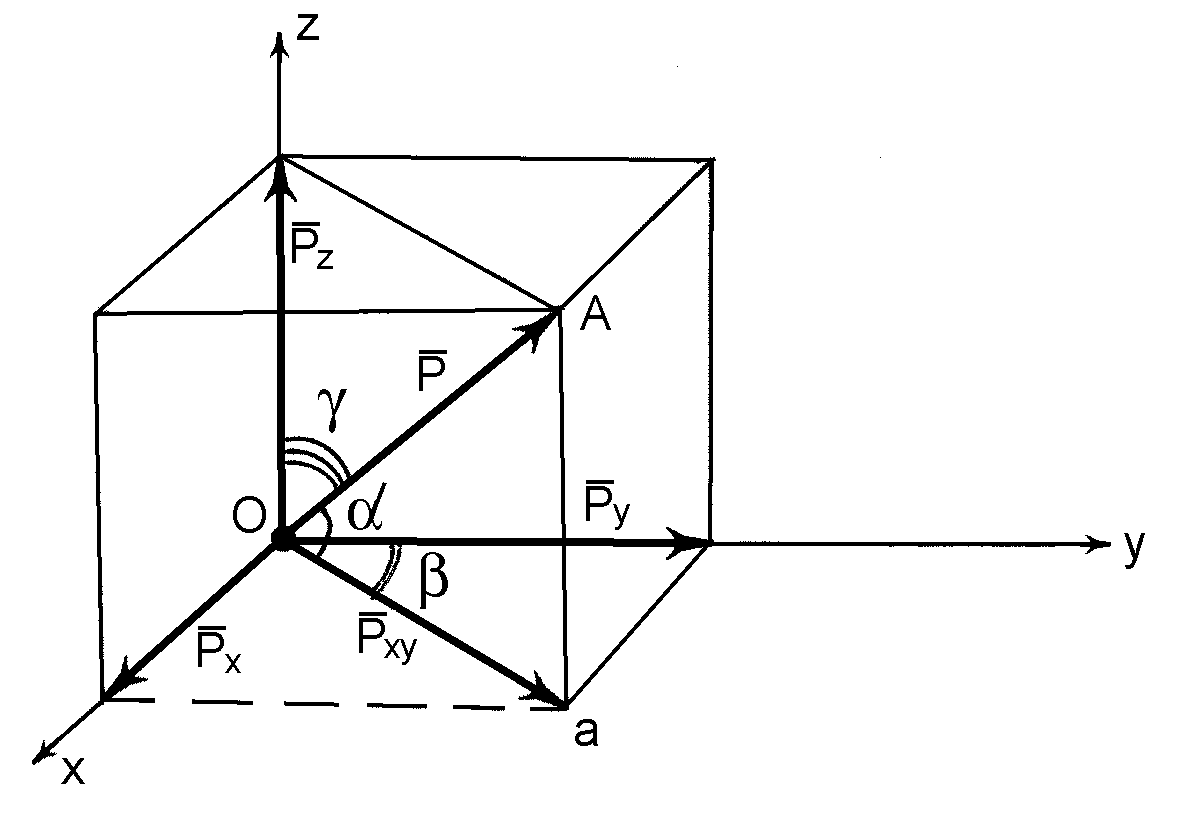
Рис. 1.9
Візьмемо
силу
,
вектор якої
довільно розташований у просторі
(рис. 1.9). Виберемо у просторі прямокутну
декартову систему координат
![]() ,
початок відліку якої (точку
)
суміщений з точкою прикладання вектора
сили
.
Спроектуємо вектор сили
на площину
,
початок відліку якої (точку
)
суміщений з точкою прикладання вектора
сили
.
Спроектуємо вектор сили
на площину
![]() .
Опустимо з точки
(кінець вектора сили) на вказану площину
перпендикуляр, який перетинає її в точці
.
На площині
утворено вектор
.
Опустимо з точки
(кінець вектора сили) на вказану площину
перпендикуляр, який перетинає її в точці
.
На площині
утворено вектор
![]() ,
який і є проекцією
,
який і є проекцією
![]() сили на площину. За модулем ця проекція
дорівнюватиме
сили на площину. За модулем ця проекція
дорівнюватиме
![]() , (1.5)
, (1.5)
де - кут між вектором сили та площиною .
Якщо
в площині
позначити кут
![]() ,
то є можливість спроектувати силу
на осі
та
,
то є можливість спроектувати силу
на осі
та
![]() ,
опускаючи з точки
на осі перпендикуляри і за відомим вже
правилом отримати проекції вектора
на вказані осі:
,
опускаючи з точки
на осі перпендикуляри і за відомим вже
правилом отримати проекції вектора
на вказані осі:
![]() ,
(1.6)
,
(1.6)
![]() . (1.7)
. (1.7)
У
даному випадку крізь вісь
![]() та вектор сили
можна провести площину, тому є можливість
спроектувати силу на цю вісь за відомим
правилом. Ця проекція буде дорівнювати
та вектор сили
можна провести площину, тому є можливість
спроектувати силу на цю вісь за відомим
правилом. Ця проекція буде дорівнювати
![]() , (1.8)
, (1.8)
де
![]() - кут між вектором сили
та віссю
.
- кут між вектором сили
та віссю
.