

Характеристики мощности и статическая устойчивость
Характеристики мощности простейшей нерегулируемой электроэнергетической системы с неявнополюсными генераторами
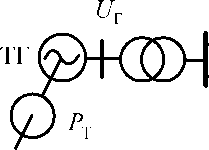
Простейшая электроэнергетическая система и ее схема замещения представлены на рис. 2.1.
![]() Uc
=
const
Uc
=
const
Eq Xd UT XBH I Uc = const
'-'""'-'I » „
Рис.
2.1. Простейшая ЭЭС и её
схема замещения![]()
Электрическая мощность от генераторов удалённой станции передается по линии в приёмную часть системы. Предполагается, что суммарная мощность работающих генераторов в приёмной части системы как минимум на порядок больше мощности генераторов удалённой станции. Поэтому можно считать, что напряжение Uc и частота на шинах приёмной части системы остаются постоянными во всех режимах.
Векторная диаграмма токов и напряжений для рассматриваемой элек- троэнегетической системы приведена на рис. 2.2. При построении диаграммы принято, что вектор напряжения шин приёмной системы совмещён с осью действительных величин комплексной плоскости (1, j), которая совмещена с системными осями (qc,dc), как это показано на рис. 2.2. Фазовый угол 5 ЭДС Ед определяет положение ротора эквивалентного генератора удалённой станции по отношению к системным осям.
При известной активной и реактивной мощности в конце электропередачи ЭДС холостого хода Eq будет равна:
PCXdz
EqZ
8.
ис
+
+
j
и,
и,
С
J
С
J
Uc+jXdzI
= Uc+jXdzjf-
Электрическую мощность Р, отдаваемую генератором, можно выразить через угол 5, являющийся одновременно и координатой ротора. Из схемы замещения (см. рис. 2.1)
S = P + jQ = EllI ,
где i = (Eq-Uc)/jX
Выделяя действительную и мнимую части, получим выражение для активной и реактивной мощности в начале электропередачи:
/ . ч Е Uc Р = Re(Sj = sin 5 = Рт sin 5/
di.
(2.1)
EqUc
_
-COSO.
При Eq = const и Uc = const характеристика активной мощности, отдаваемой генератором, представляет собой синусоиду угла 8 (рис. 2.3).
Рис.
2.3. Характеристика активной мощности,
отдаваемой генератором
Амплитуда этой характеристики Рт называется пределом передаваемой мощности.
Для нормальной параллельной работы синхронных генераторов необходимо, чтобы совпадали их частоты и были уравновешены их механические РТ и электрические Р мощности, (см. (1.30)), т.е. с учетом (2.1)
РТ = Pm sin 5.
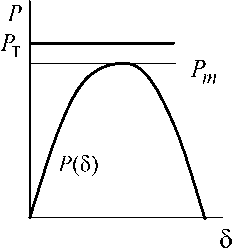
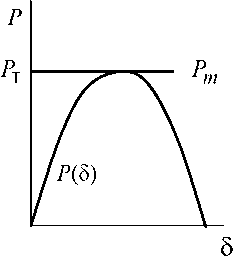
Ясно, что равновесие приложенных к ротору генератора мощностей (моментов) может иметь место только в случае, если Д. < Р
1 т т
Рис.
2.4. Возможные соотношения между
фактической загрузкой генератора Рт
и пределом передаваемой мощности Рт
При
РТ
< Рт
имеются два состояния (точки а
и b
),
в которых обеспечивается баланс
мощностей на валу ротора генератора Р
= РТ
.
При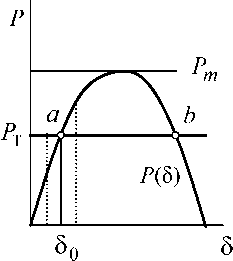
случайном отклонении угла 5 от 80 возникающая на валу избыточная мощность АР = Рт -Р стремится вернуть ротор генератора в прежнее положение равновесия, т.к. при Рт > Р ротор ускоряется, и угол 5 увеличивается, а при Рт < Р ротор тормозится, и угол 5 уменьшается. Следовательно, режим, соответствующий точке а, устойчив.
При отклонении от точки b возврата в прежнее положение равновесия не будет. Режим, соответствующий точке Ь, неустойчив.
Устойчивым режимам соответствует восходящая часть характеристики dP
мощности, для которой > 0. Это условие называется практическим
d 5
критерием статической устойчивости генераторов, а следовательно, и системы в целом.
dP dP
Для неустойчивых режимов < 0. При = 0 наступает режим,
d 5 db
предельный по устойчивости. Для того чтобы работать с определенным запасом статической устойчивости, нужно чтобы было Рт < РП1 и, следовательно, в рассматриваемом случае работать с углами 5 < 90°. Запас статической устойчивости, %, определяется по выражению
Р -Р к=— -100.
р р„,