

Описание переходных процессов в системах возбуждения генераторов
Система возбуждения генератора состоит из возбудителя, подвозбу- дителя и автоматического регулятора (АРВ). В нормальных режимах задача регулятора состоит в поддержании требуемой величины напряжения в заданной точке схемы, а в переходных режимах действие регулятора должно также способствовать затуханию возникших колебаний.
Применяемые на генераторах в настоящее время регуляторы возбуждения в основном разделяются на регуляторы пропорционального типа и регуляторы сильного действия. Регуляторы пропорционального типа изменяют ток возбуждения генератора пропорционально отклонению регулируемого напряжения. Регуляторы сильного действия реагируют не только на отклонение регулируемого напряжения, но и на отклонения других параметров режима, а также на производные параметров режима.
Структурная схема и описание переходных процессов
в системах регулирования возбуждения пропорционального
типа
 Структурная
схема системы регулирования возбуждения
пропорционального типа представлена
на рис. 1.19.
Структурная
схема системы регулирования возбуждения
пропорционального типа представлена
на рис. 1.19.
I ^ Т/го
1—* иг\ |
■ Кои |
AUT |
1 |
| Ае |
1 |
|
1 + рТи |
|
\ + рТр |
\ е0— |
1 + рТе |
АРВ Возбудитель Генератор
Рис. 1.19. Структурная схема системы регулирования возбуждения пропорционального типа
Переходные процессы в системе регулирования возбуждения пропорционального типа могут быть учтены следующим образом (учитывая
(1.43)):
-в возбудителе
J_
+ рТе
-в регуляторе
Ае = ^ A Ur , (1.69)
(l + pTpXl + pTu)
где Те, Тр, Tjj - постоянные времени возбудителя, усилительного и измерительного элементов регулятора; A UT = Ur0 -UT - отклонение регулируемого напряжения UT от требуемого уровня Ur0; Кои - общий коэффициент усиления системы регулирования возбуждения по отклонению напряжения.
Подставляя (1.69) в (1.68), можно получить общее уравнение, отражающее переходные процессы в системе регулирования возбуждения пропорционального типа
Л J- ^0 и А тт
А Еае = A UT.
(i+pTvXi + pTyXi + pTj
В установившемся режиме (р — 0 )
~ Kqu ' ^ Ur ,
т. е. добавка к вынужденной составляющей ЭДС холостого хода Eqe пропорциональна отклонению A UT регулируемого напряжения от требуемого уровня.
Коэффициент усиления по отклонению напряжения системы регулирования возбуждения имеет следующую размерность
v _ ^Eqe ед.возб.
0 U ~ А Тт ’ ’
А иг ед.напр. что читается как «единиц возбуждения на единицу напряжения».
В качестве единицы напряжения принимается номинальное напряжение генератора. В качестве единицы возбуждения служит величина Eqe
либо в режиме холостого хода генератора (равна номинальному напряжению генератора), либо в режиме номинальной нагрузки генератора. В первом случае размерностью коэффициента усиления по отклонению напряжения будет ед.возб.хх/ед.напр , во втором ед.возб.ном/ед.напр.
Для того чтобы величина A UT была незначительной, необходимо обеспечить очень большой коэффициент усиления по отклонению напряжения. Приближенно можно считать, что
дс/г, = _^1_* _L.
Uг ном Kqu
Таким образом, если потребовать точность поддержания напряжения А итш = (1 -г- 2) % , то необходимо иметь = (50^-100) ед.возб.хх/
ед.напр. Столь большая необходимая величина коэффициента усиления по отклонению напряжения приводит к тому, что система возбуждения генератора с регуляторами пропорционального типа оказывается неустойчивой. В системе возбуждения возникают колебания с нарастающей амплитудой. Системы возбуждения с регуляторами пропорционального типа устойчиво могут работать с Кои < 10, и поддержание напряжения генератора часто оказывается неудовлетворительным.
Структурная схема и описание переходных процессов
в системе регулирования возбуждения сильного действия
Поиски путей обеспечения устойчивой работы электроэнергетических систем при больших коэффициентах усиления по отклонению регулируемого напряжения привели к созданию так называемых систем возбуждения сильного действия. Оказалось необходимым вести регулирование возбуждения не по одному, а по нескольким параметрам регулирования и не только по отклонениям, но и по производным параметров регулирования, иметь практически безынерционные возбудители ( « 0,05 с ) с высоким потолком возбуждения, (2 н- 4) uf ном.
Структурная схема системы регулирования возбуждения сильного действия приведена на рис 1.20.
Рис.
1.20. Структурная схема системы
регулирования возбуждения сильного
действия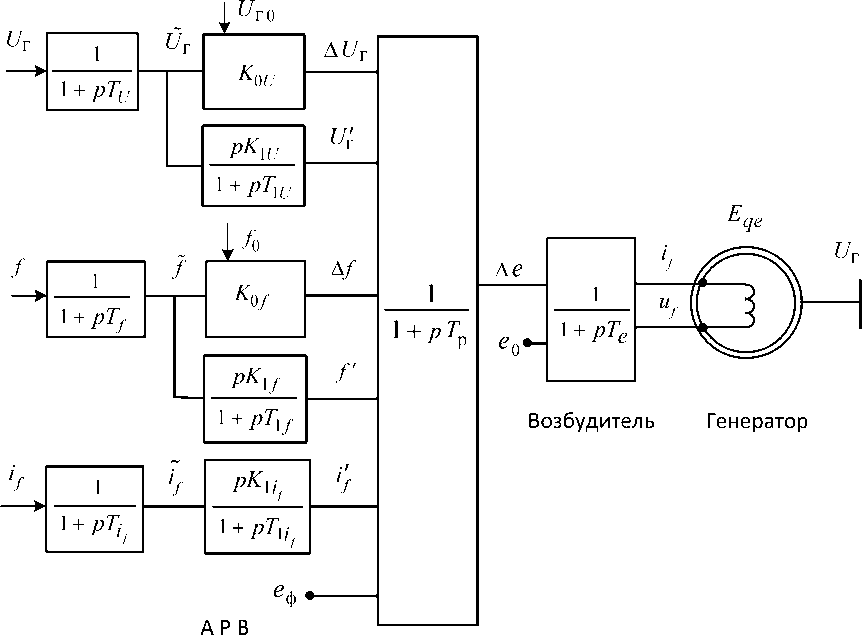
Переходные процессы в системе регулирования возбуждения сильного действия в общем виде можно учесть следующей системой уравнений:
в возбудителе
Д£,е = Же(р).Де ; (1.70)
в регуляторе
Ле = 5>я.(/>)-ЛЯ./ , (1.71)
nj '
где We (p) - передаточная функция возбудителя; Wn {р) - передаточная
функция регулятора по каналу параметра регулирования Я ;.
Для реальных устройств передаточные функции We (р), Wn (р)
достаточно сложны. Вид передаточных функций, которые с определенной точностью аппроксимируют истинные, как правило, рекомендуется разработчиками систем регулирования возбуждения. Обычно принимается, что передаточная функция тиристорного возбудителя
We{p) = ; (1-72 )
ек ’ \ + рТе
передаточная функция регулятора по каналу параметра регулирования /7/
рКш,
коп
+ —
0П1
1 +
рТш
V J
J
1
(Ь73)
(1 + рГр)(1 + ^Гя.
Здесь Коп , Кхп - коэффициенты усиления по отклонению и первой производной параметра 77 ; те, т тп тш - постоянные времени возбу-
J J J
дителя, усилительного, измерительного и дифференцирующего элементов регулятора соответственно.
При анализе динамической устойчивости электроэнергетических систем используется численное интегрирование. Поэтому операторные уравнения (1.70)-(1.73) приходится записывать в форме обыкновенных дифференциальных уравнений. Необходимо учитывать также важные конструктивные ограничения, проявляющиеся при больших возмущениях.
Дифференциальные уравнения переходных процессов во входных цепях АРВ:
в канале регулируемого напряжения
dUT
т L - ту _ ту ■
1Ur 7, _ Г UT’
r dt
(1.74)
eu=Km(Un-UT) + KwU'T;
в канале частоты
гД = /»-/;
dt
(1.75)
T
f
ef=K4(f-f0) + K,}f;
в канале тока возбуждения
Ti
(1.76)
T\i
f
dt
d_
— i 7
-
lf
lf’
--T/
+
f
dt
di'
di
f
(1.77)
Ле = Ге (Ае, Aemin , A<?max),
где Ге - функция, вводящая ограничение суммарного сигнала на входе усилительного элемента регулятора; еф - сигнал, пропорциональный форсировке возбуждения,
<W ПРИ ит - <W
0 , при С/р > ^расфор’
Uфор’ ^расфор _ уставки на форсировку и снятие форсировки возбуждения.
Переходные процессы в возбудителе:
Eqe Гe \Eqe> Eqe min’ Eqe max )>
где ГE - функция, вводящая ограничение Eqe.