

1.2. Описание переходных процессов в нагрузках
Нагрузки узлов электроэнергетических систем при исследовании устойчивости могут учитываться различными способами в зависимости от поставленной задачи и от требуемой точности её решения. При этом вся комплексная нагрузка какого-либо узла или её части могут замещаться эквивалентным синхронным или асинхронным двигателем, учитываться динамическими характеристиками или постоянным сопротивлением.
Описание переходных процессов в синхронных двигателях
Наиболее точным описанием переходных процессов в синхронном двигателе, как и для генератора, являются уравнения Парка-Fорева.
U
М
Рис.
1.13. Положительное направление тока и
моменты, приложенные к ротору двигателя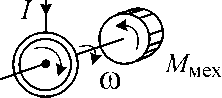
Учитывая, что двигатель в отличие от генератора потребляет электрическую энергию и момент, развиваемый двигателем, является вращающим моментом (рис. 1.13), уравнения для двигателя записывают в виде системы (1.53)-(1.56):
уравнения напряжений обмоток двигателя
djq
dyVj
c/\|/
(Ь54)
—
-
- i r
•
—
lD
' D
’
dt
d\\i
r ■
dt
уравнения потокосцеплений обмоток двигателя
(1.55)
V/ = xad ld + xflf + xfD lD ’
Vz> = Xad ld + XfD lf + XDlD’
У О ~ Xaq lq X0 *О ’
уравнение движения ротора двигателя
(1.56)
В общем случае момент сопротивления механизма, присоединённого к ротору двигателя Ммех, зависит от скорости вращения. Можно принять
(1.57)
М,
мех
—
М
сх
+ (Af
о
— М
ст)ш“,
где Мст-момент сопротивления механизма при скорости со = 0 (статический момент); М0 - момент сопротивления механизма при номинальной скорости вращения со0; а - коэффициент, обычно равный 0 н- 2.
Полные уравнения Парка-Горева для описания переходных процессов в синхронных двигателях при исследовании устойчивости электрических систем применяются редко. Обычно используются упрощённые уравнения. Упрощение уравнений Парка-Горева для синхронного двигателя осуществляется точно так же, как и для синхронного генератора. При этом, как и для синхронного генератора, для синхронного двигателя имеется несколько математических моделей, характеризующихся различной степенью точности описания переходных процессов.
Описание переходных процессов в асинхронных двигателях
При анализе переходных процессов больших ЭЭС уравнения Парка- Горева для асинхронных двигателей обычно записываются либо в проекциях на систему координат, вращающуюся со скоростью со 0, либо в проекциях на систему координат, ось q которой совмещена с вектором напряжения узла сети, к которому подключен двигатель. В последнем случае в расчёте появляется много систем координат, вращающихся с различными скоростями сош, и возникает необходимость многократных пересчетов параметров режима из одной системы координат в другую. Здесь для асинхронного двигателя будет использоваться система координат, вращающаяся со скоростью со 0. Обычно это общая система координат для ЭЭС
в целом.
Учитывая симметрию асинхронных двигателей по продольной и поперечной осям, уравнения двигателя можно представить так:
dwp
(1.58)
мех
’
M
= Im(W).
Здесь
обозначено
4'
= yq
+ jyd;
U
= uq+jud;
*c
~ ~
5
=
Vo + j'Vd
;
1
= lq
+ jld
’
Xp
X^> X^ 5
^p
Iq
j h > ■>
■^ц
—
xad
~ xaq
’
со*,
со о*- скорость вращения ротора двигателя
и координатной систе-
Для
описания момента механизма, присоединённого
к асинхронному двигателю, можно
использовать (1.57).
Модель
асинхронного двигателя, не учитывающая
электромагнитную инерцию обмоток
статора.
В уравнениях (1.58) следует положить г
= О, d^¥/dt
=
0.
Учитывая, что в относительных единицах
d®
ds
dt
dt’
(Dq
=
1;
со0
— со = .s';
получим
мех
-M;
7
M]
at
(1.59)![]()
![]()
![]()
![]()
Из двух последних уравнений выразим токи обмоток двигателя:
(-ус/)
t^d
=
-j—'й-
2
Р ^
7
=
х"х
X
F
Хц у
0
— Р
vp
-*ц
хсхр-хц
(1.60)
^=7-
h
=
+
2
Р хсхр
- Хц
X
X
X
хг
ЛСЛ
Р
-
Лц
Введём обозначения:
(1.61)
х
= хс
-
р "vp С учетом этих обозначений первое уравнение (1.60) получает вид закона Ома:
U = E" + jx"i. (1.62)
Подставляя ток 7р из (1.60) во второе уравнение (1.59) и учитывая
(1.61), получим в итоге
„ ds
(1.63)
-
+ je>0s
\Ё",
С7-
dt хс Т"
где
М = ту® о* = [E"qUd -E"duq)/x".
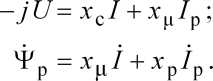
Таким образом, при принятых допущениях асинхронный двигатель в схеме замещения системы должен быть представлен ветвью с сопротивлением х" и ЭДС Ё" (рис. 1.14).
Рис.
1.14. Замещение асинхронного двигателя
ЭДС
Е"
Изменение Ё" в переходном режиме описывается системой уравнений (1.63).
Модели асинхронного двигателя, не учитывающие переходные электромагнитные процессы. Дальнейшее упрощение уравнений, описывающих переходные процессы в асинхронном двигателе, связано с неучётом переходных электромагнитных процессов и в обмотках ротора. Во втором уравнении системы уравнений (1.63) для этого следует положить dE"/dt = 0. Объединив это уравнение с (1.62), после преобразований получим:
U = ZI:
+
jx
Jxi
ар
(1.64)
Z = jxa+-
+ J'(xap +хц)
где ха, хор - сопротивления рассеяния обмоток статора и ротора.
Эквивалентное сопротивление двигателя Z соответствует схеме замещения, приведённой на рис. 1.15, которая получила название Т- образной.
*ар
/т.
U
Рис. 1.15. Т-образная схема замещения асинхронного двигателя
Таким образом, при принятых допущениях в общей схеме замещения электрической системы асинхронный двигатель должен быть представлен Т-образной схемой, а из уравнений, описывающих переходные процессы в двигателе, осталось только уравнение движения ротора:
T, — = M„PV -M:
ds_
dt
(1.65)
Определять активную мощность, потребляемую двигателем, по Т- образной схеме замещения достаточно сложно. Так как сопротивление взаимоиндукции хи значительно больше сопротивления рассеяния обмот-
г1
Р
х
_TYYV
U
х„
Рис. 1.16. Г-образная схема замещения асинхронного двигателя
(1.66)
Р =
rD2 + (s х)2
В переходных режимах ЭЭС напряжения в узлах сети, к которым подключены асинхронные двигатели, могут изменяться значительно. При этом значительно будут изменяться и скольжения роторов двигателей. Сопротивления двигателя хц, х, гр зависят от величины напряжения на обмотках статора и скольжения ротора лд по отношению к вектору напряжения статора, 5Д = s-sv. Изменение индуктивных сопротивлений двигателя объясняется изменением степени насыщения стали. Активное сопротивле
ние обмотки ротора гр зависит от частоты наводимого тока в обмотке ротора. Частота тока зависит от скольжения .уд . Чем больше частота, тем больше гр из-за вытеснения тока к поверхности проводников обмотки ротора.
 Для
Г-образной схемы замещения двигателя
изменение хприближённо
можно учесть так
Для
Г-образной схемы замещения двигателя
изменение хприближённо
можно учесть так
= W
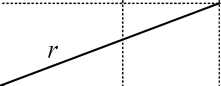
Можно принять к^= 2. При организации расчётов переходных режимов нужна именно - проводимость ветви намагничивания в схеме замещения двигателя. Зависимости х(яд) и гр(5д) представлены на рис. 1.17 в виде кусочно-линейных аппроксимаций [1].
![]()
X,
Гл
р
Рис. 1.17. Зависимости х(зд) и Гр(5д)
Расчётные схемы ЭЭС для анализа переходных режимов, как правило, включают только сети 220 кВ и выше (основная сеть ЭЭС) и насчитывают многие сотни и даже тысячи узлов. В качестве нагрузок в такой схеме фигурируют потоки мощности, уходящие с подстанций основной сети в сети более низкого напряжения, в основном в сети 110 кВ, и далее к множеству конечных потребителей. Поэтому обычно возникает необходимость моде
лировать не один какой-то двигатель (с его рабочим механизмом), а большую группу двигателей, одним эквивалентным, подключенным, например, к шинам 110 кВ основной сети. В [1] приведены следующие параметры эквивалентного асинхронного двигателя для моделирования нагрузок основной сети, о. е. : cosф = 0,8; Мтах=1,7; Мп=0,73; /п = 4,1; £ном=2%; .sр =70%; к^= 4; £3=0,7; МСТ = 0,5; Гу=0,8с-для
кратковременных возмущений; Tj = 0,6 с - если двигатели глубоко тормозятся.
Этим данным соответствуют следующие параметры Г-образной схемы замещения двигателя: х0 =0,368; х1 =0,266; г0 =0,0226;
rj =0,0424; х(Д=2,95.
В целом моделирование асинхронной нагрузки (60-70 % потребления в узле) выполнить точно невозможно. Однако требования к точности моделирования высоки. Ведь расчёты переходных режимов ЭЭС осуществляются с целью обеспечения эффективного противоаварийного управления.
Учёт переходных процессов в комплексных нагрузках с использованием их статических характеристик
Нагрузка в схеме замещения системы представляется ветвью (рис. 1.18) с некоторым сопротивлением хн* = 0,2 ^-0,4 , за которым приложена ЭДС Е, изменяющаяся во времени.
U и
Рис.
1.18. Представление комплексной нагрузки
в переходном режиме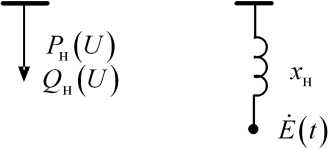
При этом переходные процессы в комплексной нагрузке приближённо учитываются так:
T„- = U-jx„^--E, н dt J н U
где SH = Рн(U) + jQH(U) - мощность нагрузки, учитываемая статическими характеристиками; Ти - постоянная времени, выбираемая из опыта расчётов.
При необходимости можно учесть и зависимость мощности, потребляемой комплексной нагрузкой от частоты:
'PB(U,s) = (l + kPs)Pa(U);
Qn(U,s) = (\-kQs)Qn(U),
дР дО
где кР = ——, к0 = - составляющие регулирующего эффекта
ds ds
нагрузки по частоте; s - скольжение вектора напряжения на шинах нагрузки по отношению к системе координат, вращающейся со скоростью
Учёт нагрузки постоянным сопротивлением
При исследовании устойчивости электроэнергетических систем нагрузки узлов могут замещаться постоянными сопротивлениями, определяемыми по параметрам исходного установившегося режима:
z .-"L
Н I £
/
При этом уменьшается общее количество дифференциальных уравнений, описывающих переходные процессы в системе. Это оправдано для удаленных от места возмущения нагрузок, а также для нагрузок малой мощности.