

Задачи, возникающие при исследовании асинхронных режимов
Допуская в системе асинхронный режим, необходимо проверить как поведение машины, работающей асинхронно, так и поведение остальных машин системы.
Для машины, работающей асинхронно, необходимо проверить допустимость максимальной величины момента (с учетом синхронной и асинхронной составляющей), развиваемого генератором, нагрев обмоток статора и ротора, допустимость напряжения на кольцах ротора (при большом скольжении).
В асинхронном режиме благодаря наличию регуляторов скорости генератор будет отдавать меньшую активную мощность, чем до выпадения из синхронизма. Так как в асинхронном режиме реактивная мощность генераторов обычно велика, то, несмотря на снижение активной мощности, ток статора может стать больше номинального значения и с течением времени вызвать недопустимый нагрев обмоток статора. Обмотки ротора, в которых благодаря скольжению наводятся дополнительные токи, также могут оказаться перегруженными по току. Перегруз по току обмоток статора и ротора будет тем больше, чем больше скольжение ротора генерато-
Асинхронный режим турбогенераторов обычно устанавливается при скольжении порядка десятых долей процента. При этом турбогенераторы могут работать в асинхронном режиме до 15-30 мин в зависимости от системы охлаждения. Скольжение гидрогенераторов в асинхронном режиме больше, чем у турбогенераторов, и поэтому продолжительность асинхронного режима у них более кратковременна - 3 - 4 мин.
Наличие асинхронного режима одной или нескольких машин может оказать влияние на поведение системы в целом. В связи с этим необходимо проверить режим той части системы, которая продолжает синхронную работу. Здесь надо выяснить: не перегрузятся ли генераторы по активной мощности, в связи со сбросом активной мощности асинхронно работающими генераторами, не будет ли недопустимо большого снижения напряжения в узлах нагрузок, что может привести к потере ее устойчивости. Важным также является вопрос о поведении устройств автоматики и релейной защиты, которые без специальной настройки в асинхронных режимах могут работать неправильно.
Определение параметров асинхронных режимов
Если речь идёт о проверке возможности ресинхронизации генераторов после нарушения устойчивости, допустимости применения АПВ, тех или иных условий пуска генераторов и т. п., то во всех таких случаях задача состоит в расчёте переходного режима электроэнергетической системы и проверке допустимости параметров режима. В целом в этих случаях расчёты переходных режимов аналогичны тем, которые проводятся при исследовании динамической устойчивости. Отличия состоят в требованиях к точности описания переходных процессов в генераторах и двигателях, а также в электрической сети.
Для генераторов, работающих асинхронно, а также для генераторов и двигателей, находящихся сравнительно недалеко (электрически) от асинхронно работающих генераторов желательно использовать полные уравнения Парка-Еорева с учетом насыщения стали и зависимости активных сопротивлений демпферных контуров от скольжения ротора.
Моделирование электрической сети уравнениями узловых напряжений становится менее обоснованным. Элементы матрицы Y уравнений узловых напряжений определяются обычно при номинальной частоте. В асинхронном режиме электрической системы может возникнуть две или более групп генераторов, работающих с разными частотами. Из этой ситуации может быть два выхода:
По-прежнему моделирование электрической сети осуществлять уравнениями узловых напряжений и мириться с неизбежными погрешностями. Это может быть приемлемым, если частоты асинхронно работающих групп генераторов отличаются мало (несколько процентов).
Каждый элемент электрической сети представлять пофазно дифференциальными уравнениями в мгновенных значениях, которые затем преобразовать, например, в систему координат (d,q, 0). В результате система уравнений, описывающая состояние электроэнергетической системы увеличится на несколько сот (а может быть тысяч) дифференциальных уравнений. Решение задачи значительно усложнится.
Следует отметить еще одну трудность, связанную с расчётом переходного асинхронного режима. Слежение за асинхронным режимом необходимо осуществлять на отрезке времени 10 с и более. Поскольку слежение осуществляется с помощью методов численного интегрирования, то требуется очень большое количество шагов, особенно при учете переходных процессов в статорной цепи, так как шаг интегрирования в этом случае должен быть не более 0,001 с . В любых методах численного интегрирования от шага к шагу накапливается методическая погрешность и, таким образом, чем дольше ведется интегрирование, тем с меньшей точностью определяются параметры режима.
Отдельной задачей является задача определения параметров установившегося асинхронного режима электроэнергетической системы. В теории электрических машин решена задача определения параметров асинхронно
го режима для отдельной электрической машины. Эти результаты можно распространить и на простейшую электроэнергетическую систему (см. рис. 6.2). Для сложных систем предлагается воспользоваться методом наложения (справедливом только для линейных задач). Рассмотрим применение метода наложения для определения момента и мощности генератора, работающего в асинхронном режиме в простейшей системе.
Приближенно считают, что наличие возбуждения не влияет на асинхронную составляющую момента или мощности (не считаются с насыщением стали). Полное значение момента и мощности при этом записывают в виде суммы синхронной и асинхронной составляющих:
М — Мся + Мас, р = р +р
1 сн ~ 1 ас •
Ток статора генератора определяют методом наложения (рис 6.4).
Здесь
Z — R + jX; Z0) — R + jX • со *; X-X'd+XBH; Ёа=Ё- со”; Ё = Ё'0; оо*=оо/с
'С00
Е
со
I
ш
Г
*
1
Ъ
г
*
1
г
_L
L
2»
"с
ZL
U,
С
Рис. 6.4. Полная схема замещения системы и схемы замещения для каждого источника
При независимом возбуждении п = 1 ? при наличии возбудителя и подвозбудителя, сидящих на одном валу с генератором, п = 3.
Синхронные составляющие мощности и момента генератора будут равны
![]()
со*![]()
R
где а = arctg —.
X
Первое слагаемое синхронной составляющей момента Мп иногда называют собственным моментом, а второе - взаимным. При непрерывном изменении угла 5 значения Мсн и Рси будут изменяться, меняя свою величину и знак. Поэтому их называют знакопеременными составляющи-
При определении асинхронной составляющей момента, развиваемой генератором, приближенно считают, что все три обмотки ротора генератора: обмотка возбуждения, продольная и поперечная демпферные обмотки - равномерно распределены на роторе. Асинхронная составляющая момента генератора от действия трех одноосных обмоток ротора определяется как полусумма моментов от действия трех соответствующих распределенных обмоток. Средняя величина асинхронной составляющей момента при этом будет равна:
М
При
малых скольжениях полагают
М.
ас.ср
У![]()
V
Коэффициент Pd называют коэффициентом демпфирования.
Величины сопротивлений и постоянные времени в этих выражениях должны определяться с учетом внешнего сопротивления в цепи статора генератора. При увеличении внешнего сопротивления величина среднего асинхронного момента уменьшается. Типичные зависимости Мас ср
имеют вид, представленный на рис. 6.5.
Рис.
6.5. Зависимость среднего асинхронного
момента от скольжения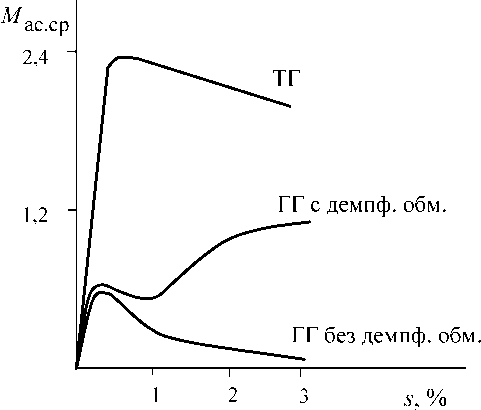
Наличие несимметрии (одноосная обмотка возбуждения, явнополюс- ность) приводит к тому, что мгновенная величина асинхронной мощности и момента будет пульсировать около среднего значения. Выражения для мгновенного значения асинхронного момента (и мощности) чрезвычайно громоздки.