

Динамическая устойчивость простейшей электроэнергетической системы
Последовательность расчётов
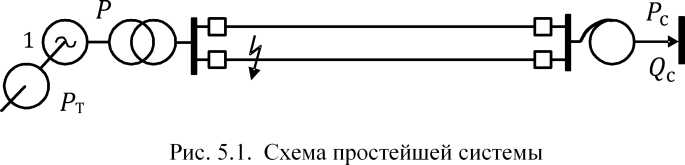
Рассмотрим подробнее все этапы анализа динамической устойчивости, описанные в п. 5.1, на примере простейшей электроэнергетической системы, схема которой приведена на рис. 5.1.
В качестве математического описания переходных процессов в рассматриваемой электроэнергетической системе возьмём составленную ранее систему уравнений (3.6). Напомним, что при этом не учитываются электромагнитные переходные процессы в генераторах, переходные процессы в системах регулирования возбуждения и скорости. Не учитываются также электромагнитная инерция и активные сопротивления элементов сети. Состояние электрической сети учитывается уравнениями узловых напряжений.
гр d б _ р р'
J , 2 ~~ Т 7 ’
dt
(5.1)
E'a=E'a о = Const,
E'Ucyx:
где
2w
l-(xd~x'd)yii ’
Величины P0, E'Cj 0 являются параметрами исследуемого на устойчивость режима электроэнергетической системы.
В качестве возмущающего воздействия рассмотрим двухфазное КЗ на землю на одной из цепей линии вблизи шин станции.
В качестве управляющего воздействия примем отключение повреждённой цепи линии через t0T секунд после возникновения КЗ.
Последовательность рассматриваемых событий представлена на рис.
t = О
II
Нормальный Аварийный Послеаварийный режим режим режим
Рис. 5.2. Последовательность событий
Для всех трёх режимов: нормального (исследуемого на устойчивость), аварийного (режим двухфазного КЗ на землю) и послеаварийного (отключена повреждённая цепь линии) схемы замещения системы будут различными. Они приведены на рис. 5.3 - 5.5.
Рис.
5.3. Схема замещения системы в нормальном
режиме
Рис.
5.4. Схема замещения системы в аварийном
режиме
Рис.
5.5. Схема замещения системы в послеаварийном
режиме
Двухфазное КЗ на землю учитывается включением в схему замещения прямой последовательности дополнительного аварийного шунта с прово
димостью
У к = “ + ~ = У 2 + У о > z2 z0
где z2, z0 - входные сопротивления в месте КЗ схем замещения для токов обратной и нулевой последовательностей.
Для каждой из приведённых схем замещения уравнения узловых напряжений имеют вид:
1 |
0 |
^13 |
0 |
1 О |
1 1 |
|
1 ,к*ч 1 |
0 |
г22 |
0 |
0 |
^25 |
йс |
|
h |
131 |
0 |
^33 |
^34 |
0 |
й3 |
- |
0 |
0 |
0 |
^43 |
г44 |
^45 |
й4 |
|
0 |
1 О |
^52 |
0 |
^54 |
^55 _ |
Ps. |
|
0 |
Исключив из системы уравнений (5.2) напряжения U3 - U5,
Y\ | Yn Eq ^ /j
Y2\ 122JLt/cJ _ L^2
найдём необходимые для (5.1) проводимости. В рассматриваемом случае в схеме нет активных сопротивлений, поэтому Ytj = ytj и а7/- = 0 (см. п.
2.4).
Работу по заполнению матрицы Y уравнений (5.2) и по преобразованию (5.2) к (5.3) необходимо выполнить для каждой из приведённых схем.
Начальными условиями интегрирования при расчётах переходных процессов в электроэнергетических системах являются значения параметров режима и проводимостей схемы после приложения возмущения, но при t = 0. Исходя из составленного описания переходных процессов (5.1), начальными условиями интегрирования будут:
![]()
![]()
![]()
Ю(0)
® 0
’
![]()
где 50 - угол ротора в исходном (доаварийном) режиме.
Для интегрирования системы уравнений, описывающей переходные процессы, выберем метод последовательных интервалов. Метод не является особо точным и рекомендуется обычно для ручных вычислений. В (5.1) входит только одно дифференциальное уравнение, поэтому формулы численного интегрирования применяются только для расчёта приращений угла 5 за каждый интервал времени At (шаг интегрирования).
Первый интервал времени. Небаланс мощности на валу ротора генератора в начале интервала времени:
![]()
Приращение угла за первый интервал времени: Д5т=0,5-С-ДЛ0); С
(V ~ ^ ^ ^(0)-' т
1 j
Значение угла к концу первого интервала времени:
= S(oj+
Приращение и новое значение угла к концу интервала к > 1:
^P(k-i) = Р, ~р{у{\ ’ У\г >
^(к) = )+С ' АР(к-1) >
^(к) = ^(к-\) + ^ (к)'
Исключение составит интервал времени m первый после отключения повреждённого элемента системы. В этом интервале времени в расчёт должны быть введены проводимости схемы в послеаварийном режиме
У1\\> Уп • Происходит скачкообразный переход с характеристики мощности аварийного режима уЦ, б) на характеристику мощности по-
слеаварийного режима Z5^ v''1, у™, 8 j. Расчёт первого интервала времени
после скачка в методе последовательных интервалов отличается от других интервалов:
^Р(т-\) = Р\ ~Р[У\\> У\2> ^(т-1;)’
ЬС-и = Рт-р(Уп’Уи.Ь1т-иУ’
= &Ь(т-ч + 0,5-С-(дР(” _v + ДРД'.и);
^(т) ~ ^(т-1) т) ■
Выполняя последовательно интервал за интервалом описанные расчёты, строится зависимость 5(7) (рис. 5.6).
Рис.
5.6. Изменение угла 5 в переходном режиме
Заключение об устойчивости. При составлении математического описания переходных процессов (5.1) был принят целый ряд допущений. В результате система уравнений (5.1) описывает поведение не реальной, а некоторой идеализированной системы. При этом оказалось, что правая часть дифференциального уравнения не зависит от производных режимных параметров, а определяется только их величинами (позициями). Системы, поведение которых описывается такими уравнениями, называются позиционными. Для позиционных систем характерно то, что колебания в них, однажды возникнув, не затухают с течением времени. В действительности, при более полном учёте факторов, влияющих на движение ротора генератора, например, переходных процессов в обмотке возбуждения, возникшие колебания затухнут, и в системе наступит установившийся режим.
Таким образом, в рассматриваемом случае колебательные изменения угла 8 будут свидетельствовать об устойчивости электроэнергетической системы. Если же при t —> со и 8 —» оо, то электроэнергетическая система в рассматриваемом режиме при заданном возмущающем и управляющем воздействии неустойчива.