

Зміст
Вступ…………………..……..……………………………….……………….6
1. Способи керування швидкістю асинхронного двигуна…………………7
2. Розрахунок параметрів асинхронного двигуна за даними каталогу …...9
3. Дослідження динамічної характеристики методом математичного моделювання………………………………………………………………....13
3.1 Виконання стандартного тесту…………………………………..13
3.2 Дослідження динамічних та енергетичних при варіаціях активного опору роторного кола..……………………………….…..17
3.3 Дослідження динамічних характеристик при нульовій заданій швидкості ………………………...……………………………….…..27
4. Практична реалізація систем векторного керування.…………………..30
Список використаної літератури………………………………….....……..36
Висновки……………………………………………………………………..37
Вступ
В наш час керований електропривод змінного струму є найбільш надійним і економічно доцільним способом перетворення електричної енергії в механічну. Розвиток мікроелектроніки, силової перетворювальної техніки, мікроконтролерів і застосування теорії векторного керування надають потужний імпульс для більш широкого впровадження регульованого електроприводу в багатьох галузях промисловості. Найчисленнішою групою являється частотно-керований електропривод з асинхронним двигуном з короткозамкненим ротором в якості базової машини. Проте при необхідності забезпечення високоточного позиціювання та жорстких вимог до перехідних процесів доцільно застосовувати більш складні – векторні методи керування. Хоча ці системи більш дорогі, проте вони дають змогу працювати в будь якій точці площини механічних характеристик, де двигун не входить в обмеження по напрузі та максимальному струму, що обмежується класом ізоляції.
РОЗДІЛ 1: СПОСОБИ КЕРУВАННЯ АСИНХРОННИМ ДВИГУНОМ
Для зміни моменту двигуна і відповідно для керування швидкістю існують наступні способи:
1. Зміна напруги статора U1
Перевагою даного способу керування є можливість плавної зміни швидкості. Недоліком є суттєве зменшення перевантажувальної здатності двигуна пропорційно квадрата напруги та зниження жорсткості механічних характеристик, тобто збільшення ковзання двигуна. Це призводить до підвищення втрат у колі ротора пропорційно ковзанню
 ,
,
тому цей спосіб використовується при невеликому діапазоні керування швидкості в межах 1,5-2, а також для запуску механізмів та короткочасного зниження швидкості. Цей спосіб керування швидкості якнайкраще підходить для струминних механізмів (вентиляторів, насосів тощо), момент опору яких залежить від квадрата швидкості.
2. Зміна частоти напруги статора f1, в тому числі одночасно зі зміною напруги статора U1
Його перевагою є плавна зміна швидкості від нуля і до максимальної (номінальної) при незмінній жорсткості механічних характеристик та перевантажувальної здатності двигуна. Діапазон керування складає 5-10 для розімкнутих систем та 1000 і більше для замкнених. Він називається “керування в першій зоні з постійним моментом двигуна”. Недолік полягає у відносній складності та високій вартості перетворювача частоти, а також у коливаннях моменту двигуна під час перехідних процесів, бо магнітний потік змінюється.
3. Зміна активного електричного опору кола ротора R’2 (тільки для двигунів із фазним ротором)
Перевагою способу є простота його реалізації та підвищення пускового моменту двигуна, який приймає максимальне значення при критичному ковзанні sк =1. Недоліки полягають у керуванні швидкістю ступінчато, зменшенні жорсткості механічних характеристик, що призводить до різкого збільшення втрат у колі ротора пропорційно ковзанню та до чутливості зміни навантаження. Це обмежує діапазон керування.
4. Зміна числа пар полюсів p (тільки для спеціальних полюсоперемикаємих двигунів)
Перевагою способу є простота реалізації, незмінна та висока жорсткість механічних характеристик, висока економічність та надійність. Недоліком є зміна швидкості тільки ступінчато та невеликий діапазон керування швидкістю, який визначається кількістю переключаємих полюсів. Двигуни мають підвищені габарити та вартість.
5. Використання енергії ковзання за допомогою спеціальних каскадних схем (тільки для двигунів із фазним ротором)
Перевагою цього каскаду є висока економічність, висока плавність керування та жорсткість характеристик, яка поступається тільки частотному керуванню. Недолік полягає у великій установленій потужності двигуна постійного струму, яка залежить від діапазону керування швидкістю.
6. Подвійне живлення двигуна (тільки для двигунів із фазним ротором)
Недоліком є необхідність перед початком керування здійснювати пуск двигуна до найменшої швидкості. Цей недолік не має суттєвого значення для механізмів, які рідко запускаються.
7. Зміна електричного опору кола статора R1 (в основному для двигунів із короткозамкненим ротором)
Цей спосіб керування застосовується дуже рідко для двигунів із короткозамкненим ротором при відсутності інших засобів зменшити швидкість. Спосіб дуже неекономічний, тому використовується для короткочасної зміни швидкості.
РОЗДІЛ 2: РОЗРАХУНОК НОМІНАЛЬНИХ ДАНИХ ДВИГУНА
Для заданого АД розрахуємо параметри номінального режиму та параметри схеми заміщення. Вихідні дані для розрахунку параметрів зведені до таблиці 2.1.
Таблиця 2.1. Паспортні дані двигуна 4A90L6У3
-
Номінальна потужність

Номінальна лінійна напруга статора

Число пар полюсів

Момент інерції

Коефіцієнт корисної дії

Коефіцієнт потужності

Номінальне ковзання

Номінальна частота напруги статора

Параметри Г-подібної схеми заміщення (відносні одиниці)
Індуктивний опір розсіювання статора

Активний опір статора

Приведений індуктивний опір розсіювання ротора

Приведений активний опір ротора

Індуктивний опір намагнічуючого контуру

Розрахуємо параметри номінального режиму двигуна.
Кутова швидкість
 рад/с.
рад/с.
Швидкість ідеального x.x.
 рад/с.
рад/с.
Номінальна швидкість двигуна
 рад/с.
рад/с.
Номінальний момент двигуна
 Нм.
Нм.
Номінальна фазна напруга
 В.
В.
Номінальне діюче значення фазного струму статора
 А
А
Номінальний потік
 Вб.
Вб.
Розрахунок параметрів Т-подібної схеми заміщення.

Рис.2.1. Т-подібна схема заміщення.

Рис.2.2. Г-подібна схема заміщення АД.
Коефіцієнт перерахунку між Т-подібною та Г-подібною схемами заміщення

Параметри Т-подібної схеми заміщення у відносних одиницях

Параметри
Т-подібної схеми заміщення в абсолютних
одиницях запишуться




Індуктивності розсіювання статора і ротора

Індуктивність намагнічуючого контуру

Індуктивності статора і ротора

Розрахунок коефіцієнтів:




РОЗДІЛ 3: ДОСЛІДЖЕННЯ ДИНАМІЧНОЇ ХАРАКТЕРИСТИКИ МЕТОДОМ МАТЕМАТИЧНОГО МОДЕЛЮВАННЯ
3.1 Виконання стандартного тесту
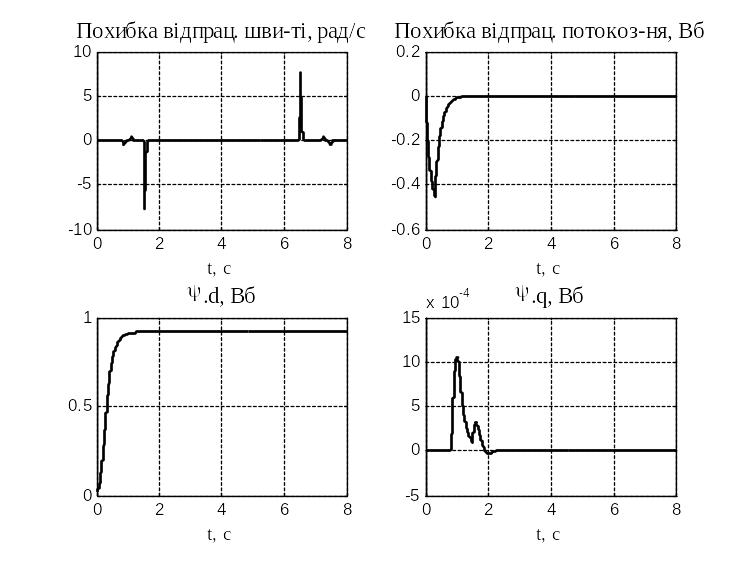
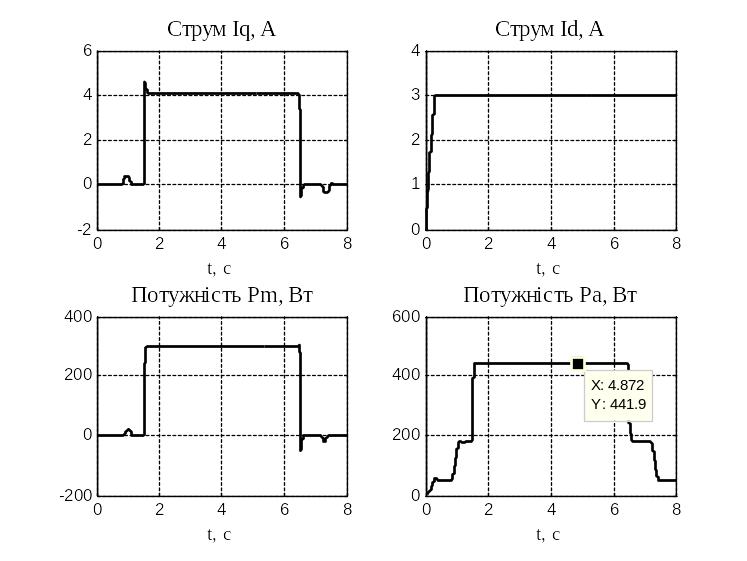
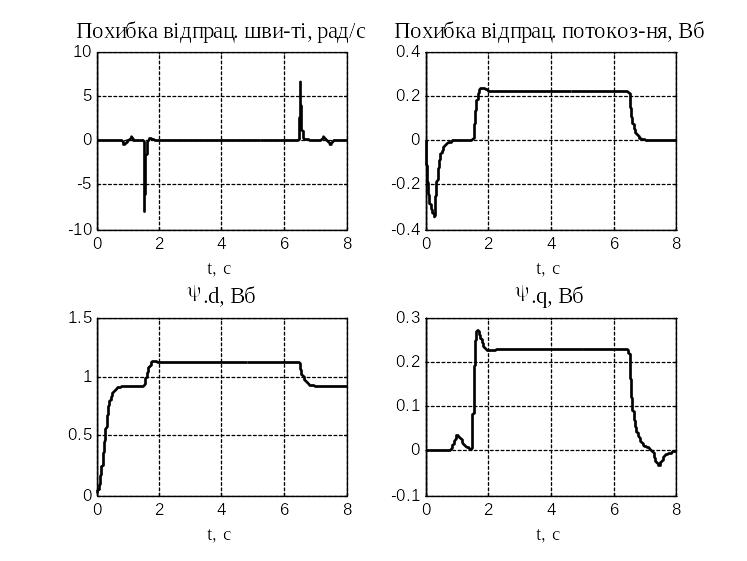
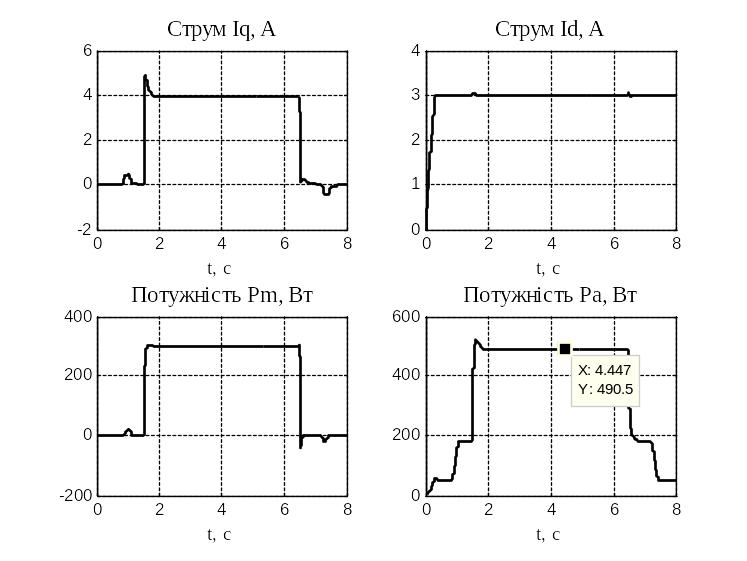
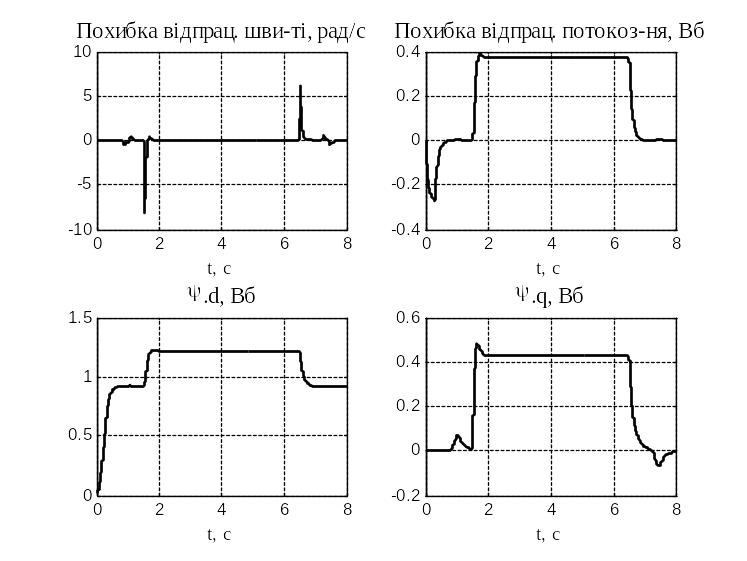
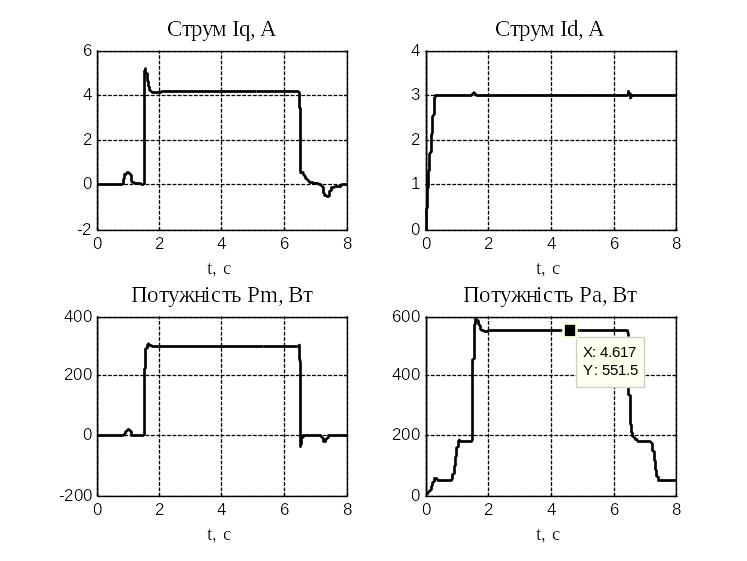
При виконанні дослідження динамічної поведінки при векторному керуванні АД використовується наступна послідовність операцій керування. Збудження машини. Після завершення збудження починається розгін на таку швидкість, щоб двигун не входив в обмеження по напрузі, за час при якому динамічний момент не перевищує номінальний. Після розгону через деякий час до валу прикладається момент навантаження який дорівнює номінальному моменту двигуна, та через час 1с знімається. Далі виконуємо гальмування по траєкторії зворотній до траєкторії розгону. Під час гальмування динамічний момент не вище номінального. Динамічні характеристики, отримані методом математичного моделювання, при виконанні стандартного тесту зображені на рисунках 3.1.1-3.1.3.
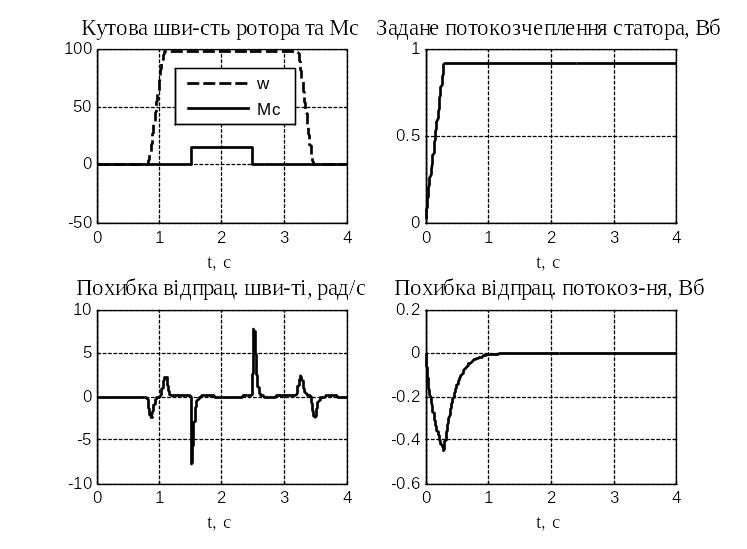
Рисунок 3.1.1 Динамічні характеристики при виконанні стандартного тесту
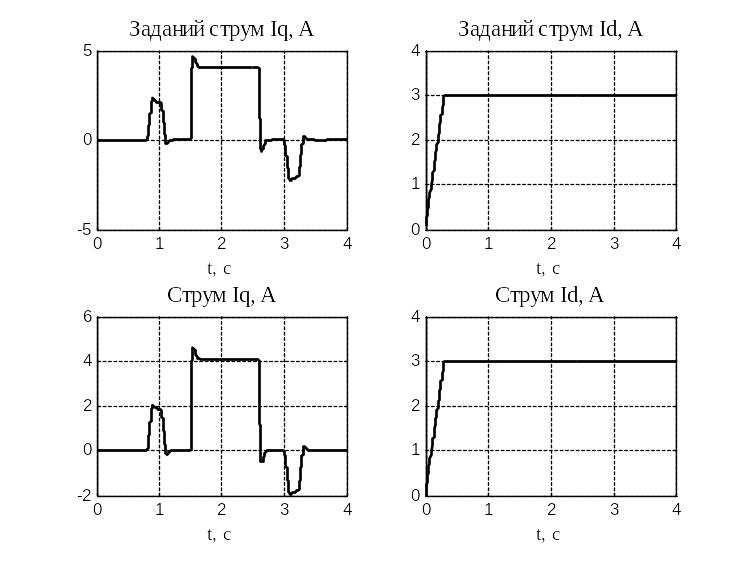
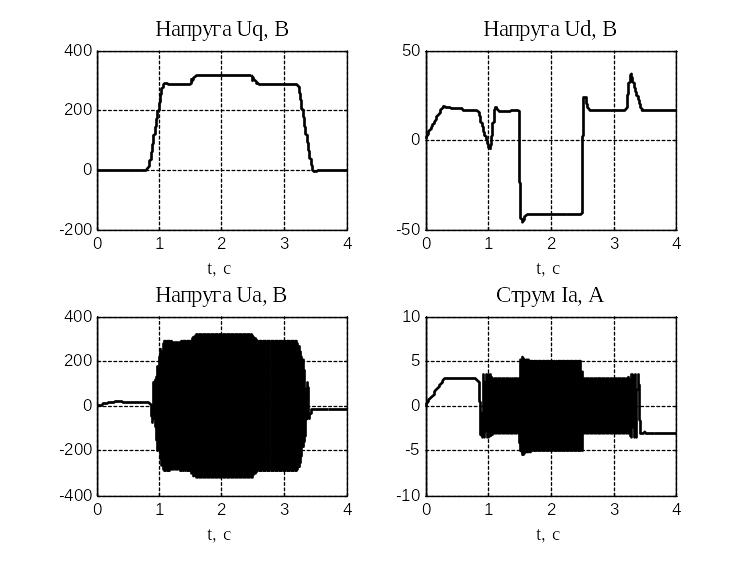
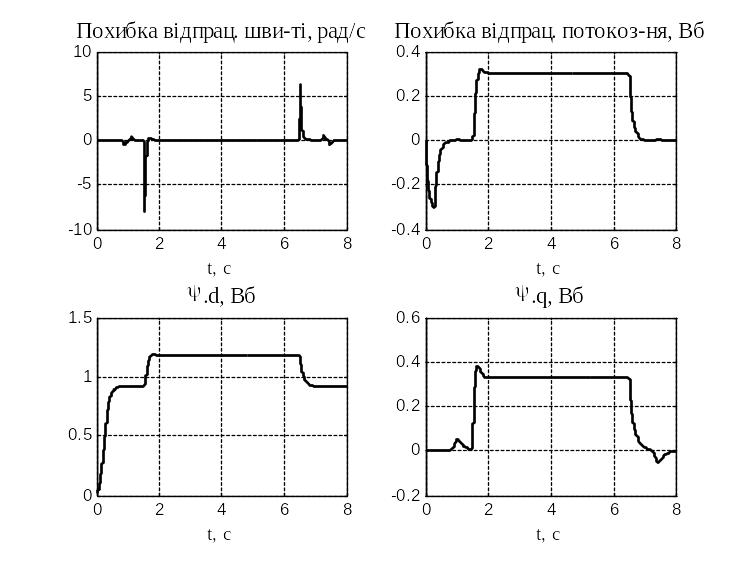
Рисунок 3.1.2 Динамічні характеристики при виконанні стандартного тесту
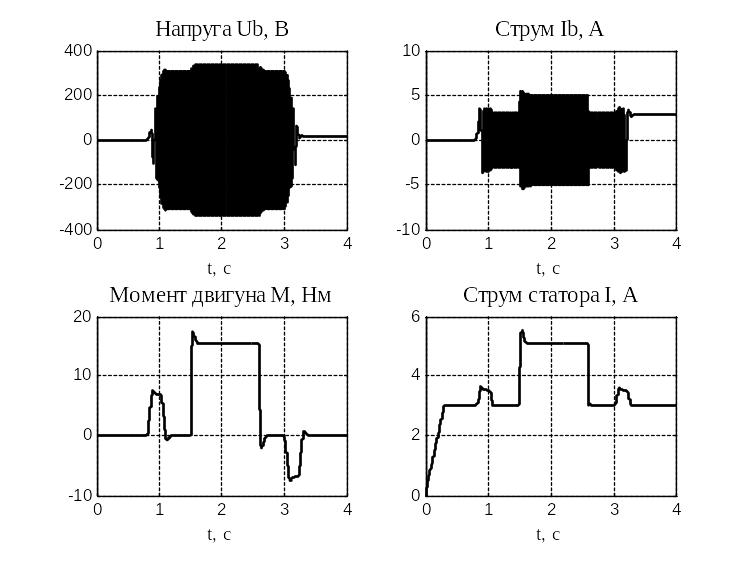
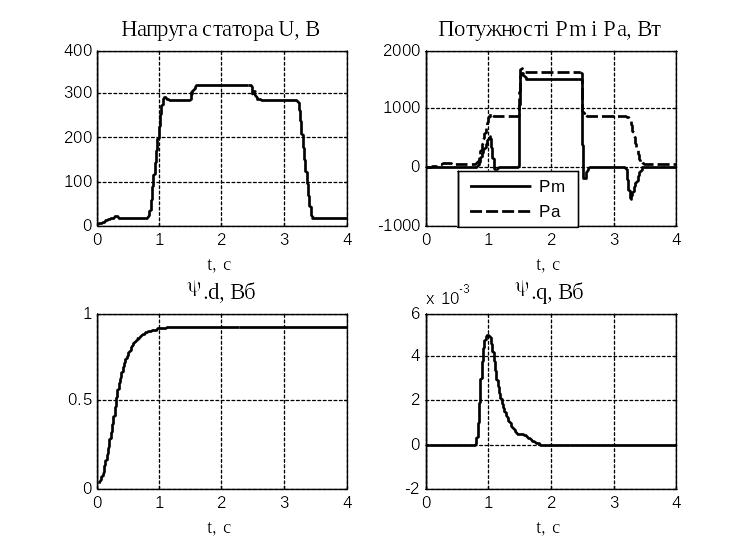
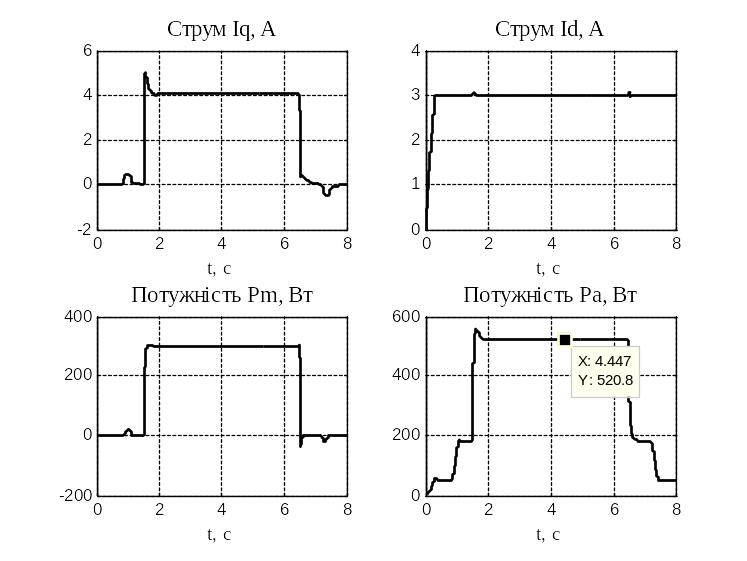
Рисунок 3.1.3 Динамічні характеристики при виконанні стандартного тесту
Як можна побачити з графіків, отриманні данні відповідають теорії векторного керування електроприводом. Використаний алгоритм керування дозволяє відпрацьовувати задану швидкість практично без статичної похибки. Спостерігалася незначна динамічна похибка при розгоні (2 Рад/с) та накидані моменту (8 Рад/с) навантаження.
3.2 Дослідження динамічних та енергетичних при варіаціях активного опору роторного кола
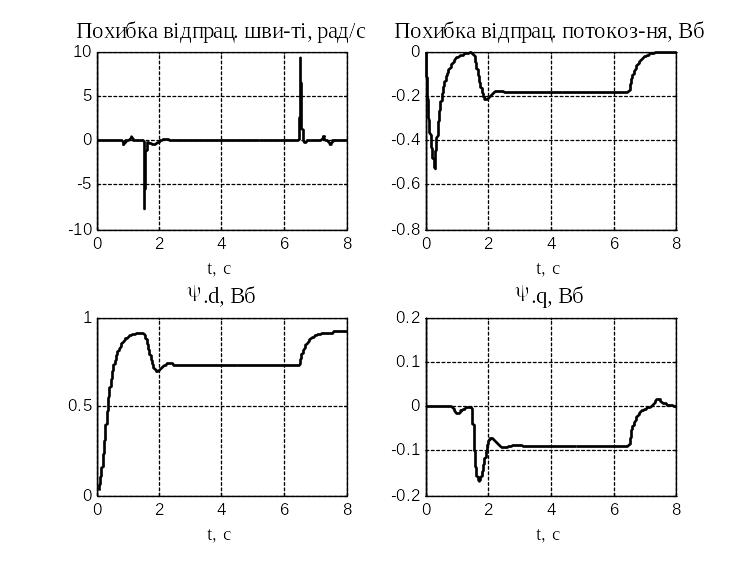
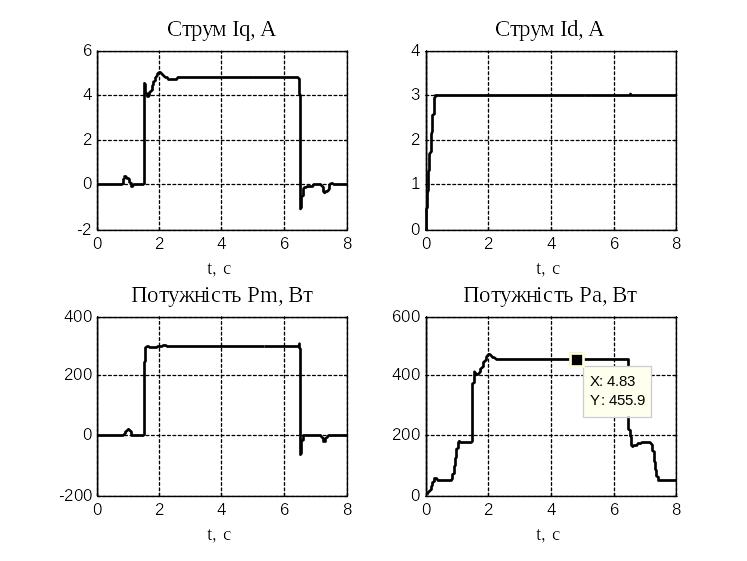
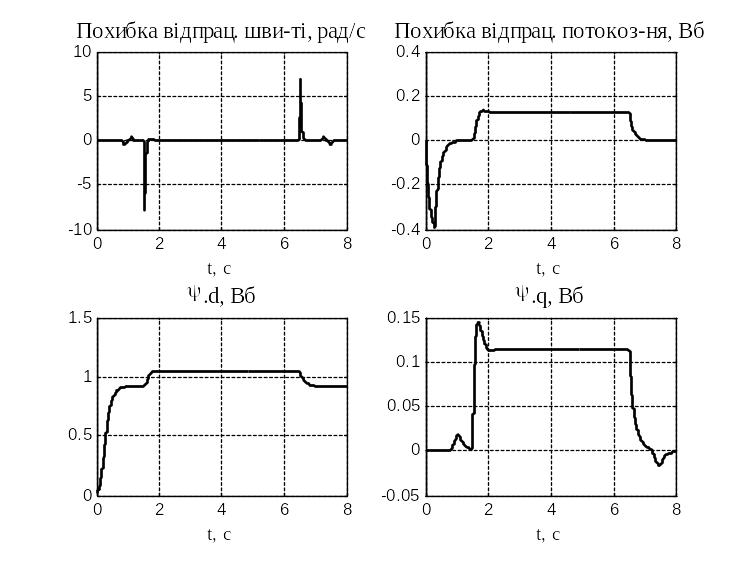
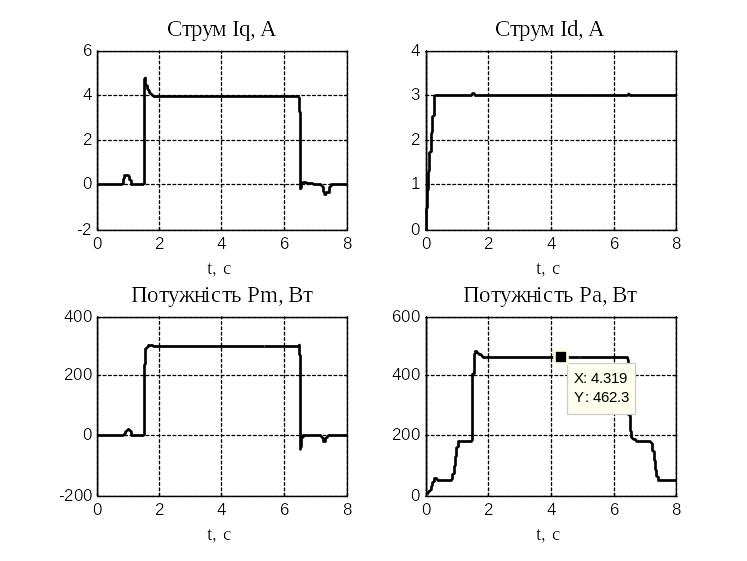
Динамічні та енергетичні характеристики, отримані математичним моделюванням, дослідження при варіаціях активного опору роторного опору, від 0,5*R2н до 2* R2н з кроком 0,25, зображено на рисунках 3.2.1 – 3.2.7 відповідно. Для виконання даного тесту двигун необхідно розігнати на швидкість 20% від номінальної (ω*уст=0,2*ωн) і прикласти номінальний момент навантаження (Мс=Мн=15.303 Н*м).

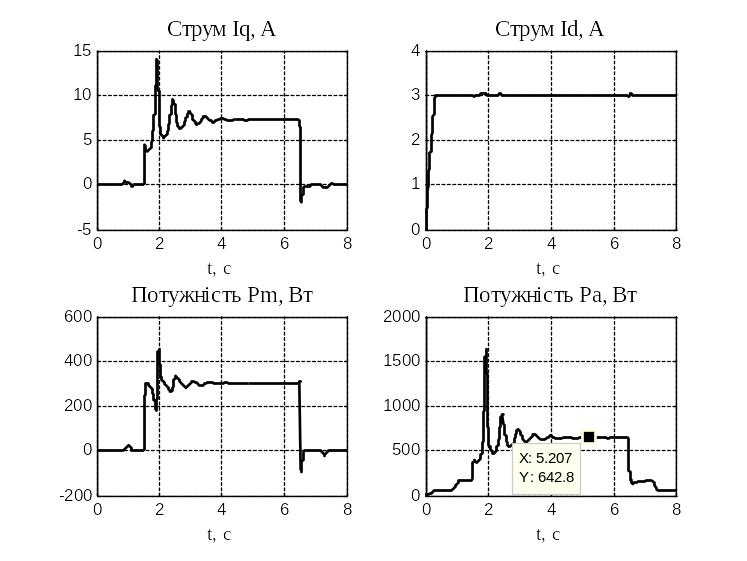
Рисунок
3.2.1
– Динамічні та енергетичні характеристики
при

Рисунок
3.2.2 – Динамічні та енергетичні
характеристики при

Рисунок
3.2.3 – Динамічні та енергетичні
характеристики при

Рисунок
3.2.4 – Динамічні та енергетичні
характеристики при

Рисунок
3.2.5 – Динамічні та енергетичні
характеристики при

Рисунок
3.2.6 – Динамічні та енергетичні
характеристики при

Рисунок
3.2.7 – Динамічні та енергетичні
характеристики при

Графік зміни активної енергії при варіації активного опору роторного опору зображено на рисунку 3.2.8.
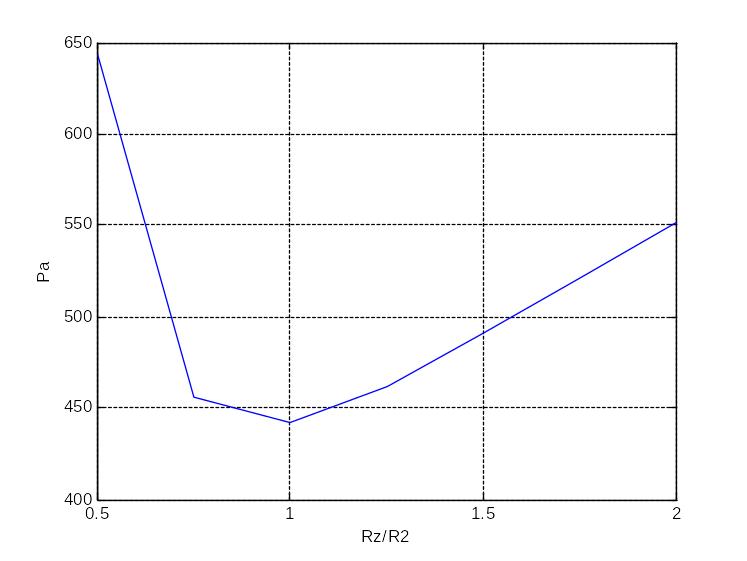
Рисунок 3.2.8 – Зміна активної енергії при варіації активного опору роторного опору
З представлених графіків (рисунки 3.2.1 – 3.2.9) видно, що при збільшенні активного опору роторного кола активна потужність спочатку падає, а після номінального значення опору роторного кола починає зростати. Похибка відпрацювання кутової швидкості та потокозчеплення в момент накидання моменту навантаження при опорі має коливальний характер, а при інших опрах мають стрибкоподібний характер. Величина похибки відпрацювання кутової швидкості практично спочатку зменшується, а потім практично не змінюється. Потокозчеплення при накиданні моменту навантаження не перевищує задане значення, похибка відпрацювання потокозчеплення зменшується. Також всі перехідні процеси при опорах більших мають стрибкоподібний характер.