

Министерство образования Российской Федерации
Санкт-Петербургский Государственный Университет Технологии и Дизайна
кафедра: АПП
Дисциплина: «Моделирование систем»
Курсовая работа
Тема: «Система регулирования линейной плотности чесальной машины»
Вариант 16
Выполнил студент: Шумаков А.В.
Группы: 4-МД-6
Проверил: Смирнов И. Н.
Санкт-Петербург
2013 год.
Содержание
Цель работы 3
Задание на курсовую работу 3
Математическая модель системы регулирования 4
1.Вытяжной прибор 4
2. Датчик 4
3. Регулятор 5
4. исполнительный механизм 6
Расчет 7
Результат 8
Программа 8
Цель работы
Целью курсовой работы является развитие навыков статистического моделирования на ЭВМ систем автоматического регулирования (САР) технологических процессов. Работа предусматривает составление математических моделей САР и возмущающих воздействий, их преобразование в удобную для реализации на ЭВМ форму, разработка программы для ЭВМ и ее непосредственное использование с последующей обработкой и оценкой результатов моделирования.
Задание на курсовую работу Система регулирования линейной плотности чесальной машины.
На рис.1 показана схема автоматизации процесса вытягивания ленты в вытяжном приборе чесальной машины.
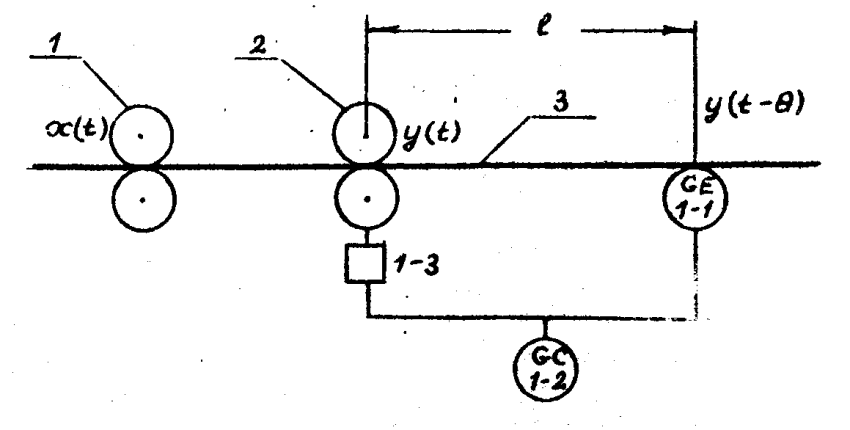
В процессе вытягивания пара выпускных роликов 1 вытяжного прибора вращается с постоянной частотой, обеспечивая постоянную линейную скорость V1 м/с, ленты 3.Пара выпускных валиков 2 в номинальном режиме обеспечивает линейную скорость ленты V20 м/c, чем создается вытяжка E=V20/V1.
Система регулирования предназначена для стабилизации линейной плотности y(t), ктекс, в случае отклонений режима работы от номинального. Основной причиной этих отклонений является изменение линейной плотности x(t) ктекс, ленты на выходе.
Система состоит из вытяжного прибора (объекта регулирования), датчика линейной плотности 1-1, регулятора 1-2 и исполнительного механизма 1-3. Датчик преобразует отклонения выходной линейной плотности от номинала в электрический сигнал, который подвергается дальнейшим преобразованиям в регуляторе и после усиления поступает на исполнительный механизм. Исполнительный механизм увеличивает частоту вращения валиков 2 и линейную скорость ленты на выходе при положительных, и уменьшает при отрицательных отклонениях линейной плотности от номинала.
Параметры системы регулирования (вариант 1.5)
Tp=6.0 c
mx=5 кТекс
δx= 0,4 кТекс
α=0,25 c-1
V1=1 м/c
V20=1,5/c
y0=4 ктекс
Kд=1 В/ ктекс
Kp=400
Tи=0,5с
Kи=0,01м/Вc
Математическая модель системы регулирования
Рассмотрим уравнения элементов системы регулирования
1.Вытяжной прибор
Исходя
из условия баланса массы чесальной
ленты на входе и выходе в вытяжной
прибор, получим ![]() (1)
(1)
Где
![]() - переменная линейная скорость ленты,
обеспечиваемая выпускной парой валиков
в процессе регулирования м/с.
- переменная линейная скорость ленты,
обеспечиваемая выпускной парой валиков
в процессе регулирования м/с.
В левой части уравнения – масса ленты, поступающей в вытяжной прибор, в правой – выходящей из него в единицу времени. Следует отметить, что это уравнение описывает процесс вытягивания лишь в самых общих чертах, игнорируя, в частности, возможные кратковременные «сгущения» и «разрежения» линейной плотности внутри вытяжного прибора, не учитывая волокнистую структуру прибора и т.п.
Преобразуя (1), запишем уравнение объекта (вытяжного прибора) в форме
![]()
Отметим,
что зависимость ![]() от
от ![]() –
нелинейная.
–
нелинейная.
Подставив значения получим:
![]()
2. Датчик
Датчик линейной плотности представляет собой преобразователь текущего значения толщины проходящей через него ленты в электрический сигнал. В силу конструктивных особенностей чесальной машины датчик не может быть размещен непосредственно за вытяжным прибором и всегда располагается на некотором расстоянии l м, от него отчитываемом вдоль ленты.
Таким образом, если считать регулируемой величиной y(t), то датчик измеряет значение y(t-θ),
где
θ – время прохождения
ленты от выпускной пары валиков вытяжного
прибора до датчика. Это время в процессе
работы может несколько меняться
вследствие изменения скорости V2(t),
составляя в среднем значение: ![]()
![]() (3)
(3)
В дальнейшем будем считать запаздывание датчика постоянным, равным 0,6 с
Датчик может быть построен в соответствии с различными принципами (фотоэлектрическим, емкостным и др.), но независимо то этого в системе его можно считать практически безынерционными ( по сравнению с другими элементами) звеном, описываемым линейным уравнением
![]() (4)
(4)
Где
![]() - выходной сигнал датчика, В;
- выходной сигнал датчика, В;
![]() - коэффициент усиления датчика, В/
ктекс
- коэффициент усиления датчика, В/
ктекс
![]() - номинальное (заданное) значение линейной
плотности на выходе вытяжного прибора,
ктекс
- номинальное (заданное) значение линейной
плотности на выходе вытяжного прибора,
ктекс
![]() – напряжение на выходе датчика при
нормальной линейной плотности, В.
– напряжение на выходе датчика при
нормальной линейной плотности, В.
Подставим данные:
![]()