

2.8 Күрделі технологиялық байланыстардың конфигурациясы
Кейбір ТБ күрделі типтік конфигурациялар 2.18 суретте көрсетілген.
Төменде ТБ жеке басқару органдары, олардың қарапайым S- жүйелері, түйіндері қарастырылған, яғни, қиынырағы олардың жүйелі-параллельді байланыстары әр түрлі өзіндік төменгі иерархиялық деңгейінің ПП басқаруына сәйкес иерархиялық ішкі деңгейлерді түзеді.
К-позициялы басқарудың оданда қиынырақ жүйелері, төменгі иерархиялық ПП деңгей объектілері, әр түрлі ТБ байланыстарды және құрама-таратушы коллекторлар немесе магистральдар деп аталатын орган басқарушыларын ұсынады. Мұндай магистральдар әр түрлі ПП энергетикада, мұнай және газ өндірістерінде және т.б. салаларда қолданылады.
2.18.1 суретінде таратылған параллельді М-1 магистральінің конфигурациясы көрсетілген, мұнда 1-жұмыс ортасының объект көзі; 2-жұмыс ортасының қабылдау объектісі; S-жеке басқару органы, қарапайым жүйе немесе түйін (М мәні шаррты түрде енгізілген).
2.18.2 суретте тізбекті жиынтық М-2 магистраль көрсетілген (мысалы, коллектордың бойында орналасқан саңылаудан мұнайды жинағанда).
2.18.3 суретте параллельді құрама-таратушы М-3 магистраль көрсетілген.
2.18.4 суретте екі контурлы жиынтық М-4 мгистраль көрсетілген.
Кейбір құрама-таратушы М-4 магистральдің жеңілдетілген маңызды технологиялық схемасы төменде көрсетілген.
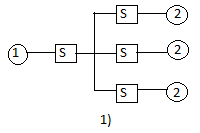
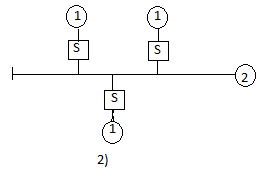

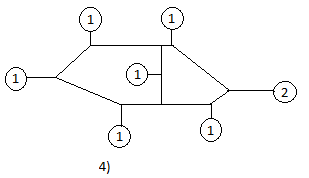
2.18-сурет. Күрделі ТБ (магистральді) конфигурациясы
«В» басқарушы органдарының жағдайына тәуелді, олардың күйлері «1» және «0» терулерден тұратын әр түрлі жұмыс комбинациялары болуы мүмкін.
В органдарының күйінің өзгеруі, жылу схемасының оперативті ауыстырып қосуларымен аталады.
В (задвижка) органдарының күйіне тәуелді келесідей жұмыс режимдері болуы мүмкін:
объект-көзі және қабылдау объектілерінің праллельді жұмысы (В1÷В11 күйлері «1»);
объект көздерінің бөлек жұмысы, яғни жұмыс ортасын «өзінің» объект көзіне береді (В3, В6, В9 күйі «0», қалғандарының күйі «1»).
Технологиялық қажеттілігіне сай басқада жұмыс режимдері орнатылуы мүмкін, олардың әрбірі В органының белгілі бір комбинация күйіне сәйкес келеді.
Берілген жүйенің N комбинациялар саны 2.13 өрнегіне сәйкес келеді.
1-4
В

2-4
10 В11

1-3

2-3
В9В7 В8
В6
В4 В5
1-2
2-2
1-1
2-1
В3
В1 В2
2.19-сурет. ПТС орналастыратын жинақтаушы магистрал М3.
Автоматты процедураларға оперативті ауыстыруды қамтамасыз ететін қажетті көрсеткіштер:
-жұмыс режиміне арналған күй комбинациялары;
-тиым салынған күйлер;
-орын ауыстыру күйлері;
-жұмыс істемей тұрған күйлері;
Қорытынды сұрақтар және есептер
2.8.1 Қандай төменгі иерехиялық деңгейдегі ПП басқару шегіндегі деңгейлік басқарулар болады?
2.8.2 М-1, М-2, М-3 және М-4 магистралдарының структураларын олардың тағайындалуын, жұмыс режимін және оардың сипатталуын келтіріңдер.
2.8.3 Қандай көлемдегі информациялық қамтамасыз ету керек организациялық басқару үшін қалай төмнегі иерархиялық деңгей жеке басқарушыорган ретінде, түйін немесе магистрал ретінде ма?
2.8.4 2.19-сурет үшін басқа вариант бойынша магистралдың жұмыс режимін құрастырыңдар және күй таблицасын келтіріңдер.
2.9 Технологиялық алгоритм басқарулары және ТП, ПП процедура басқаруларының түсініктемесі
Жоғарыда қарастырылған басқару операциясы және мақсатты түрде процеске физикалық әсер ету ПП-ны алғанда және олардың басқару процесінің құрамына кіретін олардың қарапайым жүйелеріне және т.б. ТС-ң басқару органдарына берілетін команда немесе жұмысын аяқтауға жақын іс-әрекет көмегі арқылы атқарылады.
Егер ПП (ТП) басқару процедураларына бақылау қойсақ, арнайы ұйымдастырылған жұмыс орнынан арнайы оқытылған жұмысшыларды орындайтын және формалды емес форма түрінде оның жазуын іске асырғанда онда әртүрлі команданы берген кезде дайындалған элементарлы іс-әрекеттің қатары орындалады.
Мысалы,дроссальді басқарылатын клапанға "азайту-көбейту"командасын берген кезде оператор-технологтың келесі элементарлы іс-әрекетті орнатуға болады:
-хабарлама келген кездегі сте сақтау (фиксация) акті және режим бұзылуындағы дискретті белгілері;
-РМОТ панеліндегі керекті құралдарды іздеу;
-құрал көрсеткішін есептеу;
-құралдың ағынды көрсеткішін есте сақтау;
-есте сақтау хабарламасынан алу (орнатылған белгі, символ, түсінік және т.б)
-қарапайым есептеу операцияларын орындау мысалы құралдың орнатылған және ағынды мәндерінің арасындағы айырмашылық;
-алынған мәнді бір немесе бірнеше логикалық шартқа байланысты сәйкестіккті тексеру технологиялық режимге енгізу арқылы анықталған;
-шешім қабылдау;
-РМОТ пультінде қажетті технологиялық құралды орындаушы механизмге құрастыру үшін іздеу;
-команданы шешімге сәйкес іздеу.
Жоғарыда аталған оперативтік бірлікті екі бөлікке бөлуге болады:
-оператордың элементарлы іс-әрекеті;
-логикалық шарт("ия","жоқ","және-немесе" және т.б).
Осындай алдын ала енгізіліп шартталған логикалық шарт және операторлардың технологиялық режимдегі тізбектей орындалуын (программа) технологиялық басқару алгоритмі(ТАУ) берілген.
Жұмыс операциялары ПП,ТП ТАУиерархиялық деңгейдегі тәуелділікке байланыстты келесі түрге
бөлінеді:
-жеке басқару органын басқару, олардың қарапайым жүйесі,түйін және магистральмен т.с.с
төменгі иерархиялық деңгейдегі технологиялық алгоритм;
-жеке ТО басқару-бірінші жоғарғы иерархиялық деңгей алгоритмі;
-Негізгі және көмекші ТП-ны іске асыру үшін бірнеше ТО-ны басқару-екінші иерархиялық деңгей
алгоритмі;
-ПП-ны іске асыру үшін бірнеше ТП-ны басқару-үшінш і иерархиялық деңгей
алгоритмі;
ПП,ТП басқару процедурасын сипаттаған кезде ТАУ-н құрастыру қажет.
ТАУ-ды әртүрлі иерархиялық деңгей түрінде, логикалық шарт және операторлардың графикалық
аталуындағы шарттарды қолдана отырып құрастырған тиімді.
Блок-схемадағы оператор тікбұрыштың формасын береді (2.20.2 сурет)
С
?
урет 2.20.3),ал ромб пішіні логикалық шарт болып табылады, яғни тәжірибежүзінде графикалық белгілерімен блок-схема алгоритмдері, ЭВМ-де құрылған есептеу бағдарламалары пайдаланылады.
Дайындау операторы
‘жоқ’ ‘иә’
2)
1
Оператор(команда)
)
Сурет 2.20-Логикалық шарттардың және операторлардың шартты графикалық белгілері
Операторлар және логикалық шарттар талап етілген басқару үрдіс тізбектілігінде орналасып және өзара нұсқағыштармен байланысады, өткелдің бағытын бір операторға немесе логикалық шартты басқасына нұсқайды.
Егер тексерілетін логикалық шарттар орындалып жатса, онда басқарылым (ақпарат)‘иә’(‘1’) бағытымен беріледі, ал орындалмаған жағдайда ‘жоқ’(‘0’) бағытымен беріледі.
Егер САРЖТ қасиетінде операторлар және логикалық шарттардың орындауын жоғарыдағы қарастырылған тізбек бойынша қабылдасақ, мысалы,An-ның реттейтiн клапанына әсер параметр бойынша кейбiр жұмыс ортасының ағынының үздiксiз реттеуiнiң операциялары TC арқылы Xi жолымен, онда ол формалданған түрде 2.21 суреттегідей көрінеді.
Айта кететін жайт, қарастырылып жатқан блок схемада қарапайым іс әрекеттердің жиынтығы жете бейнеленеді, аяқталған операцияларды құрайтын, үрдістiң басқарулары орындайтын функциялардың бiреуін,жеке алғанда үздіксіз реттеудің кейбір Хі параметрі.
Еске сала кетейік, персонал әсерлерінің алмастырылуы, техникалық құралдар әсерімен ПП,ТП басқару функуияларын орындауы автоматтандыру деп аталады. Оператор технологтардың негізігі қызмет құралы формальданған түсінік, оларды автоматтау деңгейін таңдау үшін ПП(ТП) басқарудың толық құралының орнауында шешуші рөлге ие болады. "B", "C" және "D" органдармен басқаруды процедураның формалданбаған сипаттамасы және оның формализациясы құрала алады, сонымен қатар олардың оңай жүйелері S, түйіндері мен магистралдары М.
1
2
3
4
5
6
7
0 1
8
9
 0 1
0 1
11
10
13
12
15
14
16
1
17
Сурет 2.21. Хі параметрінің үздіксіз реттеу операциясы САРЖТ блок схемасы
“Хі параметрінің өшуі” хабарламасының оператор-технологқа жіберілуі
1-Хабарламаны қабылдау(есте сақтау)
2-“Хі”индикатор позициясын таңдау
3-Хі шамасын есептеу
4-Хі шамасын есте сақтау
5-инструкциядан Хі берілген мәнін таңдау (жадыдан алып тастау)
6-Хі -Хі айырымын есептеу
7- шартын
тексеру
шартын
тексеру
8-“Хі ауытқуы жоқ” шешімін қабылдау
9-
( )белгіні
тексеру
)белгіні
тексеру
10- пропорциональды шамасына сәйкес орта
шығынының азаюы туралы шешім қабылдау
пропорциональды шамасына сәйкес орта
шығынының азаюы туралы шешім қабылдау
11-- пропорциональды шамасына сәйкес орта шығынының артуы туралы шешім қабылдау
12(13)-“An” позициясының қолша режим блогын таңдау
14(15)-“меньше” кнопкасын басу (“больше”кнопкасыен басу) 16- Кездейсоқ хабарламалар жоқ
17- Кездейсоқ хабарламаны қабылдау жөнінде шешім қабылдау
3 Лекция.Қарапайым объекттерді екінші түрдегі технологиялық аппараттармен басқару есептері мен әдістері
Екінші түрдегі аппарат (3.2 б сурет) пен оның математикалық моделімен (3.6 сурет) қарапайым объект микроқұрылымы сәйкесінше , оларды басқарудың маңызды есебі болып кез-келген уақытта энергетикалық балансты ұстауды ТО-да жүзеге асыру үрдісін қамсыздандыру табылады. Мысалы, жұмыс жағдайындағы рекуперативті жылуалмасу аппараты: ( ПТС 3.17 суретінде көрсетілген)
cG1(T1”-T1)-QT=0, (3.12)
бұл жерде Т1 және Т1” – құбыр жүйесінің кірісі мен шығысындағы орта температурасы;
G1- құбыр жүйесі арқылы өтетін орта шығыны;
с – құбыр жүйесінің жылу сыйымдылығы;
QT – құбыр жүйе аппаратының жылу энергия ағыны.
(1.2) қолданып түрлендіру арқылы алатынмыз:
Q1”- QT=0, (3.13)
Бұл жерде Q1” – жылутасығыш арқылы жұмыс ортасына берілген жылу көлемі.
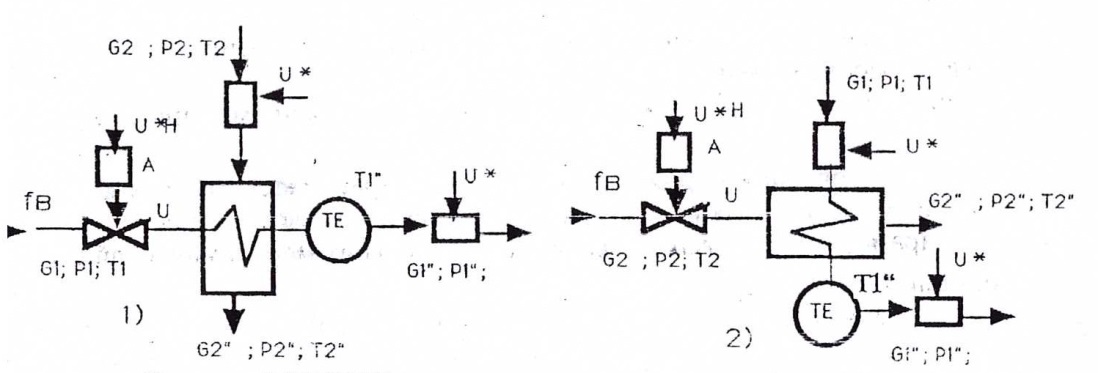
Сурет 3.17 – ПТС рекуперативті жылуалмасу аппараты
Энергетикалық баланс көрсеткіші (3.13) болып жылуалмасу аппаратының жұмыс жағдайындағы құбыр жүйесінің шығысындағы орнатылған T1 температура мәнінің оның номиналды мәніне тең болуы сәйкес болады.
(3.13) есебі Xi параметрін тұрақтандыру есебін шешу класына жатады, бұл жағдайда Т1 басқару әсерінің қалыптасуының әртүрлі нұсқасында:
- ерікті қолдану мен аппарат камерасына жылутасымалдағыштың ерікті тасымалдауы кезінде жылуалмасу аппаратының құбыр жүйесінің кірісіндегі жылытылатын жұмыс ортасының көлемі өзгеруімен;
- кірісіндегі жылытылатын ортаның ерікті тасымалдауы мен шығысындағы ерікті қолдану кезінде аппарат камерасына жылутасымалдағыштың көлемі өзгеруімен (3.17.2 сурет);
- жылытылатын ортаның кіріске ерікті тасымалдауы мен жылутасымалдағыштың ерікті тасымалдауы кезінде жылуалмасу аппаратының шығысында қолдану ортасының көлемі өзгеруімен.
Басқару әсері қалыптасуының нұсқасынан тәуелсіз Т1 параметрінің тұрақтандыру есебі тұйықталған және тұйықталмаған әдістер арқылы жүзеге асырыла алады.
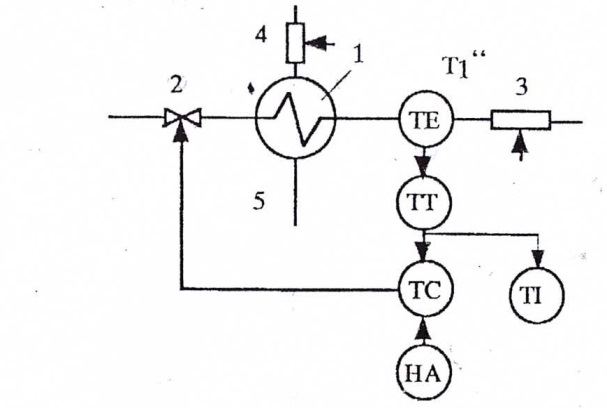
Тұйықталған АСР Т1 параметрінің құрылымдық схемасы басқару әсерінің қалыптасуының бірінші нұсқасында 3.6 суретінің қолданылуымен тұрғызыла алады. Оған сәйкес ФСА 3.18 суретінде көрсетілген.

Сурет 3.18 – Жылуалмасу аппаратының қысқартылған ФСА.
Бұл жерде 3 – жылытылған жұмыс ортасын қолдану ды ерікті басқарушы орган;
4 – жылутасымалдағыштың тасымалдауын ерікті басқаратын орган;
5 – жылутасымалдағышты бұрып жіберуге арналған ТС
Бақылау сұрақтары және тапсырмалар
3.1.1 Жұмыс күйінде қарапайым обьекттерді басқарудың негізгі есептері қандай мәліметтер негізінде қалыптастырылды?
3.1.2 1-ші түрдегі технологиялық аппараттары бар қарапайым обьекттерді басқарудың негізгі есебі, іске асыру амалдары, АЖР мен ФСА-ның құрылымдық схемалары қандай?
3.1.3 2-ші түрдегі технологиялық аппараттары бар қарапайым обьекттерді басқарудың негізгі есебі, іске асыру амалдары, АЖР мен ФСА-ның құрылымдық схемалары қандай?
3.1.4 3-ші түрдегі технологиялық аппараттары бар қарапайым обьекттерді басқарудың негізгі есебі, іске асыру амалдары, АЖР мен ФСА-ның құрылымдық схемалары қандай?
3.1.5 Берілген қарапайым обьекттің ПТС-ы бойынша құрылымдық АЖР мен ФСА құру.
3.2.3 Үшінші түрдегі технологиялық аппараттар арқылы қарапайым объекттерді басқару есептері мен әдістері
Үшінші түрдегі аппарат (3.2 б сурет) пен оның математикалық моделімен (3.6 сурет) қарапайым объект микроқұрылымы сәйкесінше , оларды басқарудың маңызды есебі болып кез-келген уақытта энергетикалық балансты ұстауды ТО-да жүзеге асыру үрдісін қамсыздандыру табылады. Мысалы, жұмыс жағдайындағы араластыру аппараты: ( ПТС А қосымшасында көрсетілген):
G1+k*G3-G2=0, (3.14)
Бұл жерде G1 – бірінші бастапқы орта шығыны;
G2 – алынған қоспа шығыны:
G3 – екінші бастапқы орта шығыны;
K – G3 және G1 шығындары қатынастарының керекті шамасын анықтайтын коээффициент.
Материалдық баланстың көрсеткіші ТС шығысынан алынған Q2 қоспасының химиялық құрамы.
Q2= Q2=const.
Автоматты басқару теориясына сәйкес есеп екі бөліктен тұрады:
G2 ерікті қолданысы кезінде G1 тасымалына әсер ете отырып Q2 тұрақтандыру;
Белгілі k қатынасы арқылы G3 параметрінің G1 параметрінің өзгерісін бақылау.
Жоғарыда аталып өткен есептердің көрсетілуімен ұсынылған араластырғыш аппараттың қысқартылған ФСА мысалы 3.19 суретінде көрсетілген.
Сурет 3.19 – Араластырғыш аппараттың қысқартылған ФСА
Бұл жерде FFC – G1 шамасына G3 параметрі қатынасын автоматты реттеу локалды құрылғы.
Бұл басқару объектісінің Q2 параметрін бақылау тұйықталмаған әдіспен жүзеге асыру келесі жүреді:
G2 кіріс ағыны шамасын корректирлеуші шаманы енгізу арқылы кіріс ағындағы G1 шамасын тұрақтандыру;
Б4 кестенің жалғасы
К-ТО шығындалуын сипаттайтын позиционды параматр реттеуші
ТО шығындалуын сипаттайтын үздіксіз параметр реттеуші
ТО шығындалуының Х (параметрін ТП шығындалуы) сипаттайтын үздіксіз параметр бақылаушы
4 Лекция. Ішкі жүйені дистанционды басқару.
4.1. Ішкі жүйенің дитанционды басқару туралы жалпы түсінік.
Ішкі жүйені дистанционды ТС (“A”,” Б “,” С“,”Д “)басқару оргондарына оператор-технолог (қолмен басқару режимі) немесе автоматты (автоматты басқару режимі) құралдары арқылы командалар жіберуін қамтамасыз ететін қарапайым немесе күрделі объекттің жекеленген құрылғыларынан тұрады.
Дистанционды басқарудың жекеленген құрылғыларының барлық саны ішкі жүйеге кіретін белгіленгенd(2.12)көрсеткіші дистанционды командалар жиынтығымен анықталады. Дистанционды басқарудың әрбір жекеленген құрылғыларына сәйкес келесі басқару фунцияларын орындаушысына т (5.4[3] таблица) ТСА жатады:
-HS-дискретті командалар құрастырулары (кнопкалар,басқару кілттері,басқару режимін ауыстырғыштар,перне тақта және т.б);
-NS-дистанционды берудің электрлық ИМПС-ке дискретті командалары(күштік контакторлар,контактісіз пусктік тиристрлік құрылғылар );
-NY(PY)-дистанционды берудің үзіліссіз команданың электро (гидропневматикалық) пропортционалды ИМ(электрлық, гидро(пневматикалық) күшейткіштер және позиционерлер) берілуі;
-GI-дроссельді реттеуіш арматураның индикация жағайы;
-SB-реттелмейтін органның өнімділігін, мысалы, насосың күйі “қосулы”-”өшірулі“ (сигналдық шамдар, жарықшамдар т.с.с.) екенін толықтырушы екілік индикациясы;
-GB-дроссельді запорной арматураның күйі “ашық”- “жабық” екілік индикациясы;
Қарапайым және күрделі объекттің ішкі жүйенің дистантционды басқаруы келесі принциптерден құралады:
-жекеленген (әрбір ТСбасқарушы орган операторлық пунктте немесе орнында(локалды) қолша режимінің жекеленген құрылымдарынан құралған.
-таңдамалы (анықталған ереже ТС басқарушы органдардыңанықталған адресі, яғни сәйкес командалар жіберетінортақ командалардың және ТС басқару органдардың құрылымдарының анықталған жиынтығы);
-программалық (бірнеше технологиялық өзара байланысқан ТС басқарушы органдарKS программалық жабдыққа автоматты күйге сәйкес қолша командан істейтін немесе істемейтін күйге келтіріледі).
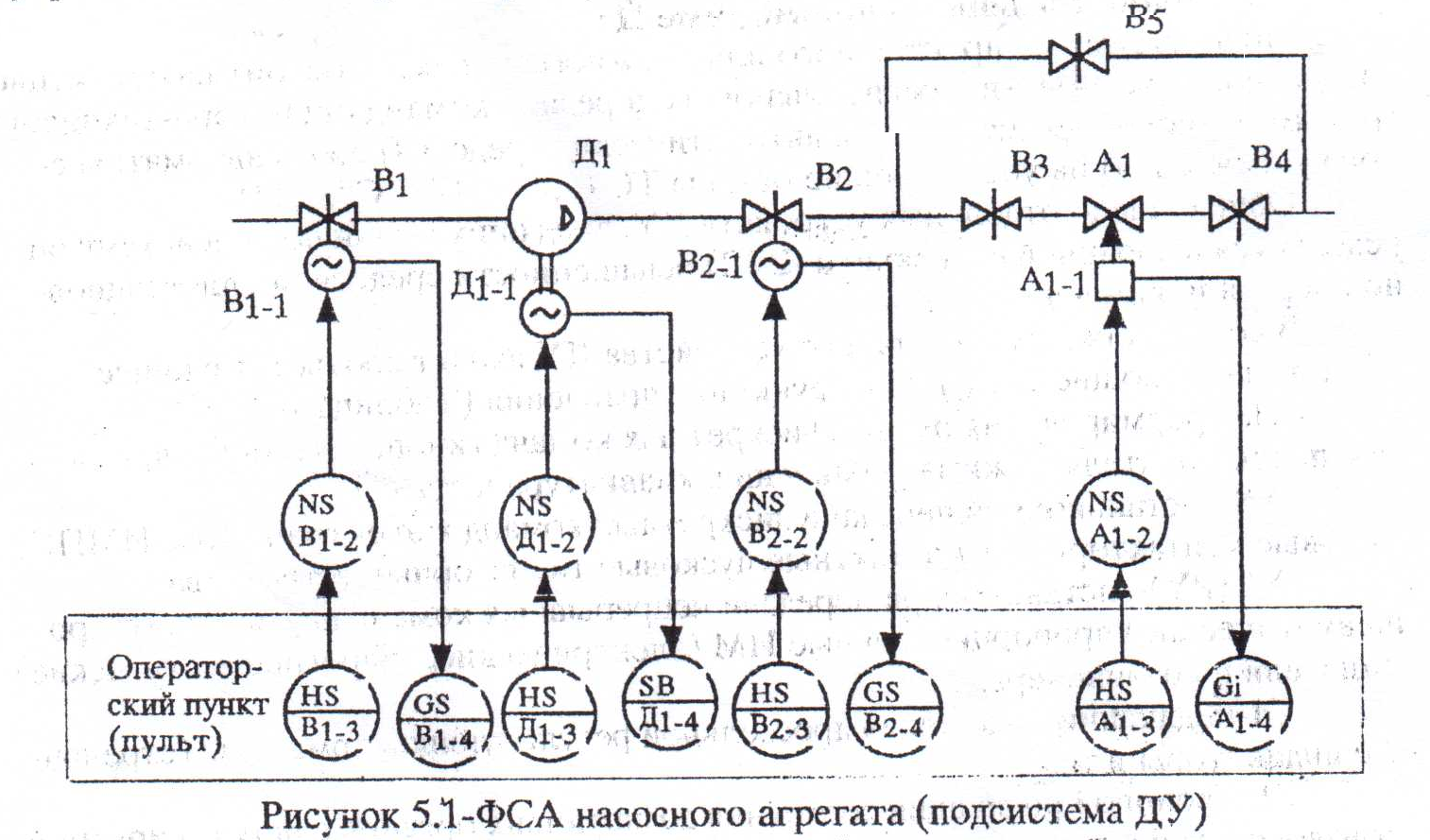
4.1 суретке сәйкес ішкі жүйе дистанционды басқаруы жекеленген принциптерге сүйенеді және дистанционды басқару жеке құрылғылар“B1”, “Д1”, “В2” , “А1” т.с.с құрылғылардан тұрады. Техникалық құрылғылардың құрамы және монтажды позициялары сәйкес әріптік-сандық жүйемен белгіленген.
Дистангционды басқарудың алгоритмі (алгоритмдік схемасы):
-басқарушы органның динамикалық құрылымы төменгі деңгейлі объекттің құрылымдық схемасы (2.5-бөлім);
- басқару ТС органның объекттің төменгі иерархиялық деңгейлі ПП, ТП (ашық және тұйық тәсілдері) параметрлерін басқару тәсілдерімен
Типтік алгоритмдер қолданылып құрылған алгоритмдік схемаға байлынысты ТСА таңдай жүзеге асады, берілген ішкі жүйеге кіретін әр ДУ құрылғысының ПЭС-і құралады.
Бақылау сұрақтар мен есептер
4.1.1 ДУ ішкі жүйесінің тағайындалуы, ол қандай жеке құрылғылардан тұрады, қандай ТСА-лар жеке ДУ құралғыларын түзеді және олармен жүзеге асырылатын функциялар?
4.1.2 ДУ ішкі жүйесі қандай принциптермен құрылады, қандай деңгеймен 5.1 суретіне сәйкес нысан үшін ДУ тәсілдері қамтылады?
4.1.3 ДУ ішкі жүйесін 5.1 суретке сәйкес командаларды жіберудің таңдау принципі бойынша түрлендіру.
4.1.4 Оқытушының тапсырған нысанның ПТС-на сәйкес ФСА көркемделген ДУ ішкі жүйесін ұсыну.
5 Лекция. Пропорционалды ИМ бар ДУ-ң алгоритмдік схемасы.
Типтік алгоритмдердің шартты сызбалық кқрсеткіштері көмегімен құрылған АЛС ядросы болып келесілер табылады:
- ПЕР аналогты сигналын ауыстыру алгоритмі;
- аналогты сигналды күшейту (түрлендіру) алгоритмі.
U*н шығыс сигналы Ким беріліс коэффициенті бар пропорционалды ИМ кірісіне әсер етеді.
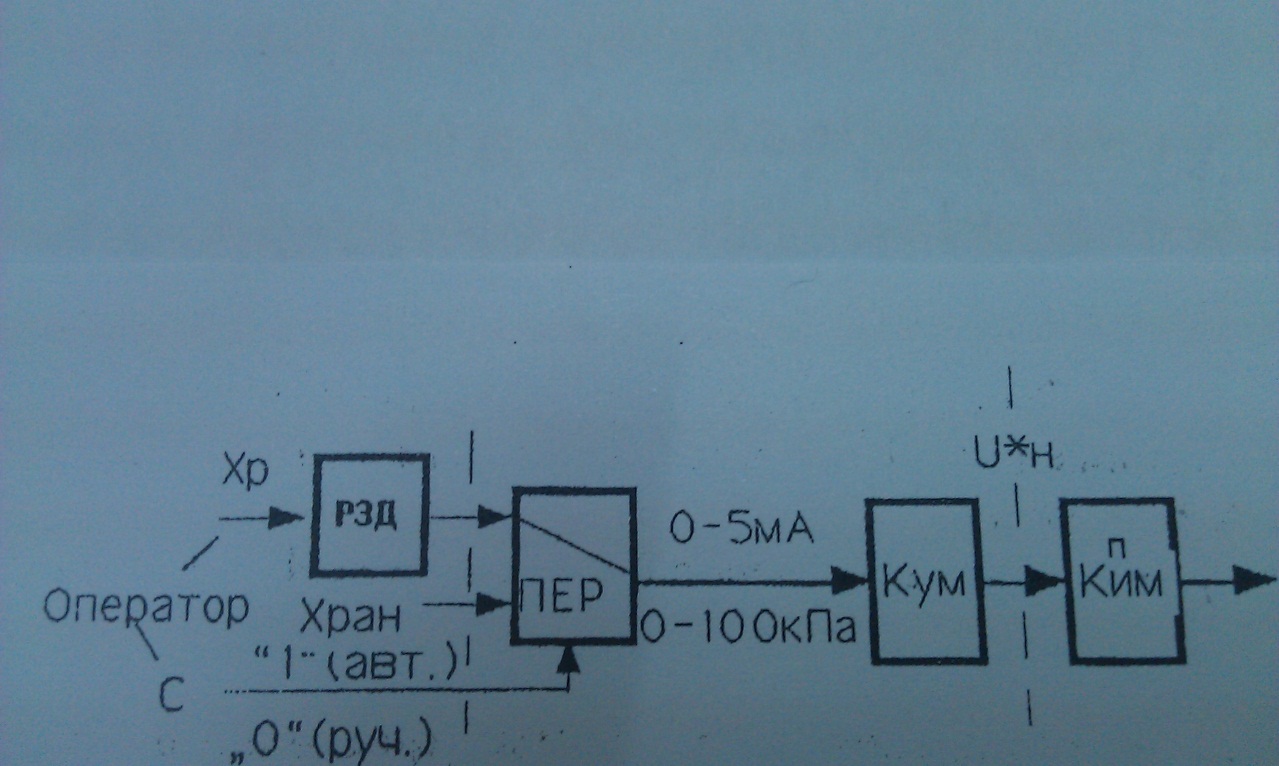
5.1Сурет –пропорционалды ОМ алгоритмдік ДУ сұлбасы
АЛС ядросының кірістік ақпаратты сигналы болып келетіндер:
-дискретті сигнал С («1» -автоматты реттеу режимі; «0» -қолмен басқару режимі);
-ХР – оператормен құрастырылатын РЗД беретiн құрылымдар көмегiмен қолмен басқарудың үздiксiз әсерi;
-ХРАН – Хі технологиялық параметрі бойынша ОМ жағдайын басқаратын автоматты реттеуіштің кірістік сигналы (РАН);
Берілген алгоритмдік сұлба ОМ жағдайымен тұйықталмаған ДУ принципі бойынша құралған, себебі оператор –технолог қол режимінде, РЗД-ге әсер етіп, ОМ-ді индикатор арқылы визуалды түрде басқарады.
Тұйықталған ДУ әдісі АСР шамасы U% көмегімен жүзеге асырылады, басқарулар төменгi иерархиялық деңгей объектiнiң шығысында (2.5 сурет [3]).
Тұйықталған ДУ әдісін жүзеге асырғанда пропорционалды ОМ –ФСА 5.1 суретте көрсетілген түрге ие болады:
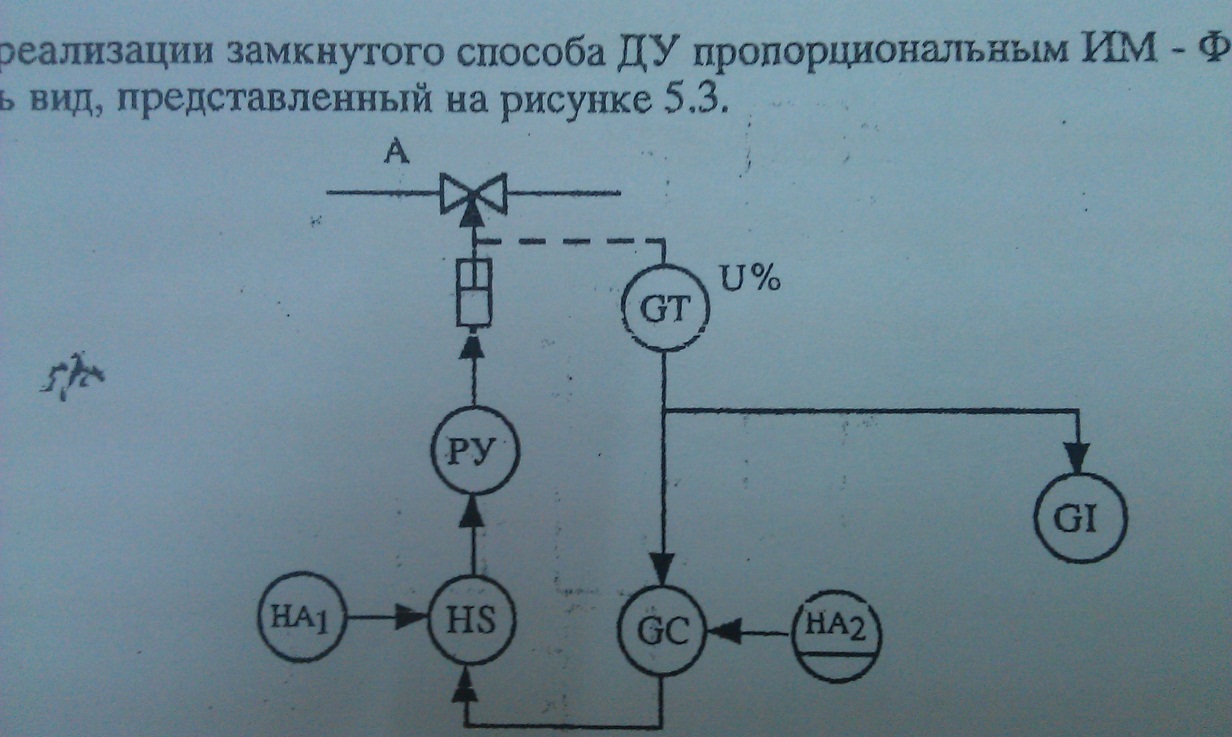
5.1 Сурет –тұйықталған әдісті пропорционалды ОМ-нің ДУ функционалдық сұлбасының мысалы
GC функциясы PAH алгоритмін орындайды.
НА1 –тұйықталмаған әдісті ДУ режиміндегі жергілікті беретін құрылым;
НА2 –тұйықталған әдісті ДУ режимінде беретін құрылым, әрі НА2 және GІ индикаторы оператордың пунктінде орналасқан.
Бақылау сұрақтары және есеп
5.1.1 ДУ пропорционалды ОМ-мен тұйықталмаған әдіспен қалай ұйымдастыруға болады, АЛС пен ФСА мысал келтіру.
5.1.2 ДУ пропорционалды ОМ тұйықталған әдіспен қалай ұйымдастыруға болады, АЛС пен ФСА мысал келтіру.
6 Лекция. ИМПС дросселді реттеуіш органның ДУ алгоритмдік сұлбасы
Алгоритмдік сұлба екі каналдың әрбірінің электрқозғағышының командаларын құрастыруын бейнелейді:
-х (U*н «арттыру»);
-у (U*н «кеміту»).
АЛС ядросы болып әрбір канал үшін келесі типтік алгоритмдер сәйкес болады:
-ПЕР алгоритмі – басқару режимін таңдау «қол-автоматикалық»;
-«тыйым» алгоритмі х(у) команаларын құру;
-«немесе» алгоритмі у(х) кіріс дискретті сигналмен немесе GBH (GBL);
-«немесе» біркірісті алгоритм (шығыс командаларының қайталамасы, яғни контактор)
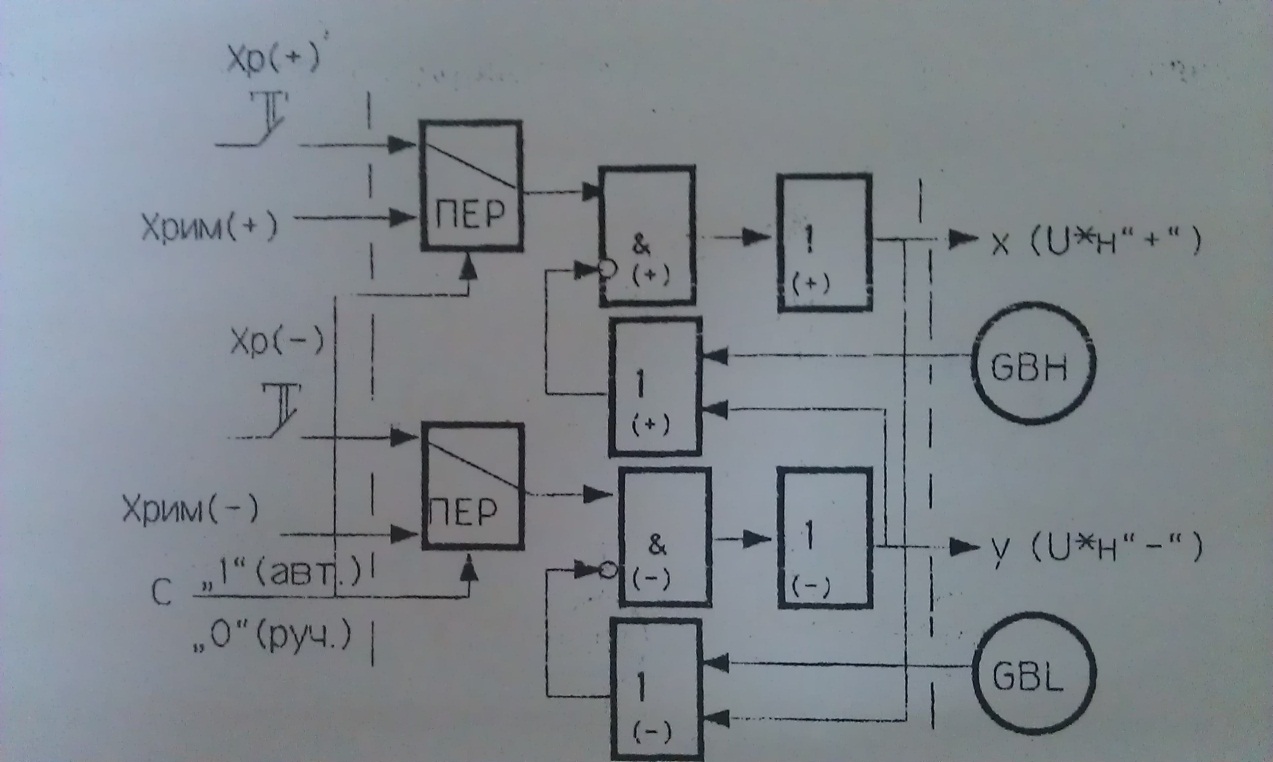
6.1 Сурет - ИМПС дросселді реттеуіш органның ДУ алгоритмдік сұлбасы
Әрбір канал алгоритмінің кірістік ақпараттық сигналы болып:
-С дискретті сигналы баспалдақты формада («1» -автоматты режим; «0» -қолмен басқару) –оператор-технологпен құрылады;
-Хр(+), Хр(-) –қолмен басқарылатын дискретті импульсті команда;
-ХРИМ(+) , ХРИМ(-) – құрылатын дискретті импульсті команда;
Берілген шартты қанағаттандыру үшін “ЖАДЫ” алгоритмінің шығысында шығыс х командасы қалыптасады, ол GBH дискретті сигналының R кірісіне енуіне дейін созылады , яғни “ЖАДЫ” алгоритмінің бастапқы күйіне алып келеді, ол дегеніміз R=GBH логикалық шартының орындалуы.
Ескерту
1.Техникалық шарттарға сәйкес кейбір запорлы арматуралар үшін берік дроссельді -запорлы органды қамтамасыз ету керек, жұмыс ортасының жабық күйінде өтуі үшін. Бұл мақсат үшін қосымша дискретті ESH кіріс сигналы қолданылады, ол электроқозғалтқыштың нығыздалуы кезінде салмағының жылдам көтерілуіне әкеліп соғады.
ESH дискретті сигналы қосымша ПОР алгоритмінің бірінші ретті түрлендіргішінің кірісінде қалыптасады, электрқозғалтқыштың І тогын өлшейді және валдың Мкр айналу моментін өлшейді.
Бұл жағдайда R логикалық шарты У командасын өшіру үшін келесі түрде болады:
R=GBH*ESH ,
яғни, “ЖАДЫ” алгоритмінің R кірісінде “у” каналы арқылы “И” қосымша алгоритмі қолданылады.
2. АЛС 5.6 - суреттегі сәйкестікпен мысал ретінде келтірілген. АЛС үшін қолданылатын ДУ запорлы арматурасы оператор - технологқа қате команданы белгілеу үшін керек және де аралық уақытта қажетті задвижканы жіберіп, тоқтатуға арналған.
Бақылау сұрақтары мен есептері
6.1.1 ДУ ИМПС дроссельді -запорлы органы қалай ұйымдастырылады, АЛС мен ФСА-ны келтіру.
6.1.2 ДУ ИМПС дроссельді -запорлы органы үшін 1 ескертуді ескере отырып АЛС құру.
6.1.3 ДУ ИМПС дроссельді -запорлы органы үшін 2 ескертуді ескере отырып АЛС құру.
6.1.4 Дроссельді -запорлы органы үшін ПЭС басқаруын құру, 5.6 - суретіндегі АЛС сәйкестігімен.
7 Лекция. Электроприводты басқарудағы ДУ мөлшерлеуіш органының басқарылмайтын өндірістілігінің алгоритмдік схемасы.
АЛС бірканалды дискретті х командасының(U*д – “қосу”) электроприводтың аз қуаты(0,27÷2 кВт) кезіндеқалыптасуын көрсетеді.
Қарастырылып отырған АЛС ядросы болып келесілер табылады:
ПЕР1 және ПЕР2 алгоритмі;
“ТЫЙЫМ САЛУ”алгоритмі;
“НЕМЕСЕ1”және “НЕМЕСЕ2”алгоритмі;
“ЖАДЫ” алгоритмі.

7.1 сурет – ДУмөлшерлеуіш органының басқарылмайтын өндірістілігінің алгоритмдік схемасы.
Кіріс информациялық сигналдар болып табылатындар:
C – басқару режиміндегі сатылы форманың дискретті сигналы(“1” автоматты , “0” қолша);
Xp(вкл) – қолша басқарудың дискретті импульсті сигналы – “қосу” командасы;
ХЛУ(вкл)- автоматты басқарудың дискретті импульсті сигналы – “қосу” командасы;
Хр(откл) жане ХЛУ(откл)- сәйкесінше қолша басқару мен автоматты басқарудың өшіру командалары;
ESH– дискретті сигнал “қайта қосу” ;
SBH - дискретті сигнал “қосу”.
Cәйкесінше қарастырылып отырған алгоритмдік схеманың логикалық рұқсат беру шарты S кіріс импульсті “қосу” командасының түрі келесідей:
S= Xp(вкл)*( SBH+ESH+ Хр(откл)) немесе
S= XЛУ(вкл)*( SBH+ESH+ ХЛУ(откл)). (5.2)
Сәйкесінше R логикалық шартының “ЖАДЫ” алгоритмінің бастапқы күйіне келуі, яғни өшу командасының орындалу түрі:
R= Хр(откл)+ESH немесе
R= ХЛУ(откл)+ESH. (5.3)
Бақылау сұрақтары мен есептері
7.1.1ДУ мөлшерлеуіш органының басқарылмайтын өндірістілігін қалай ұйымдастырады, АЛС келтіру.
8 Лекция.АЛС Тұйық әдіс бойынша Хі параметрін стабилизациялау есебін шешу
Реттеу нысанының динамикалық қасиеттеріне байланысты, сонымен қатар реттеуші Хі параметрін реттеудің статикалық және динамикалық нақтылық талаптарына әртүрлі типтік стабилизация есептері құрастырылады, оларды іске асыруға қажетті АРЖ атқарушы бөлігінің алгоритмдік схемалары қолданылады.
8.1 1-ші иерархиялық басқару деңгейінің статикалық инерционды нысанның шығысында статикалық қате δ=0 болғанда Хі параметрінің стабилизация есебін іске асыруға арналған АЛС.
Есеп бір контурлы АРЖ-ң ПИ (ПИД) реттеушісі арқылы іске асады. АЛС ОМ-ң түріне байланысты (пропорционалды немесе ИМПС) және аналогты немесе микропроцессорлық ТСА көмегімен құрастырылуы мүмкін. 8.1 суретте Р-130 контроллермен қолданылған АЛС көрсетілген, 8.1.1 суретте ИМПС-мен, 8.1.2. суретте пропорционалды ОМ-мен.
Басқару бөлігінің ядросы ретінде келесі типтік алгоритмдер болып табылады:
(шешілетін есептің алгоритмдік сыйымдылығы)
Кірістік сигналды масштабтау алгоритмі ( Р-130-да аналогты сигналды ВАА(ВАБ) енгізу алгоритмімен қиыстырылған);
РИМ алгоритмі (PD) немесе (PID);
ПЕР алгоритмі;
Ескерту – кіріс-шығыс алгоритмі жеңілдету үшін көрсетілмеген.
Басқару бөлігінің кіріс сигналы:
(шешілетін есептің мәліметтік сыйымдылығы)
РИМ (РАН) алгоритмінің инверсті кірісіне берілетін Хі параметрлі бірінші ретті түрлендіргіштің Хі-аналогты сигналы;
Хі параметріне сыртқы қолша мән енгізу функциясын атқаратын НА1 құрылғысынан келетін сигнал, РИМ(РАН) алгоритмінің тура кірісіне беріледі.
НА2 құрылғысынан келген аналогты сигнал, қолша тәртіп кезінде пропорционалды ОМ күйіне сәйкес сыртқы қолша мән енгізу функциясын атқарады (8.1.2.);
HS құрылғысымен құрылатын, «қолша-автоматты» басқару тәртібін атқаратын, реттеу жүйесі жұмыс күйіне енгізілгені жайлы дискретті сатылы түрдегі сигнал.
Ескерту
– Дискретті С сигналы жүйе ашылған
кездегі SB-ң статикалық балансын қамтамасыз
етеді(Yε=0), РИМ және РАН алгоритм
программаларында қаралған.

8.1-сурет. АЛС 1-ші иерархиялық басқару деңгейінің статикалық инерционды нысанның шығысында статикалық қате δ=0 болғанда бір контурлы АРЖ-ң Хі параметрі .
Басқару бөлігінің шығыс сигналы:
РИМ алгоритмі шығысынан ИМПС-ге өткендегі екі каналды команда (ЩИМ сигнал);
РАН алгоритмі шығысынан пропорционалды ОМ-ге өткендегі бір каналды аналогты сигнал.
Типтік алгоритмдердің конфигурациясы (байланысуы) 6.1.1 және 6.1.2 суретте көрсетілген.
Ескерту – Басқару бөлігінің конфигурациясы кесте ретінде жасалады, әр жолда жазылады:
Алгоблок нөмірі мен цифрлық код, кітапханадан шығарылған, оған енгізілген алгоритм, оның модификаторы;
Алгоблок-қабылдағыштың кіріс адресі(алгоблок нөмірі мен кіріс нөмірі) және онымен байланысқан алгоблок-негізінің шығысы (алгоблок нөмірі және шығыс нөмірі);
Коэффициенттер мен константалар мәнін жазатын параметрлік кірістер.
Кестенің мәліметтері Р-130 “бағдармалау” контроллер режимінде тиісті бағдарламалық қамтамасыз ету арқылы ПЭВМ экран интерфейсінің көмегімен қолша немесе автоматты түрде шығарым пультінің көмегімен еңгізіледі.
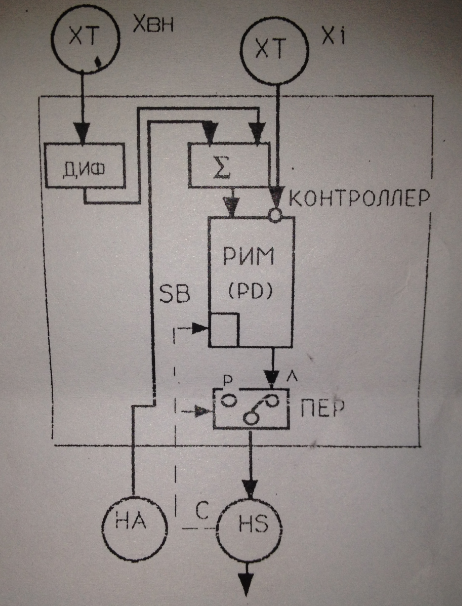
8.2.2АЛС статикалық немесе астатикалық инерционды объектердің шығысында δ≠0 статикалық қателік кезінде X_i параметрінің тұрақтандыру есебін іске асыру.
Есеп бірконтурлы АСР П-регуляторының көмегімен іске асырылады. АЛС-ң АСР басқару бөлігінің шығысының ИМПС-те орналасқаны 6.2 суретте көрсетілген.
Басқару бөлігінің алгоритм ядросы 8.1.1 суретке ұқсас.
Қосымша СУМ (∑ символымен көрсетілген) алгоритмі еңгізілген;
Кіріс сигналдарды масштабтайтын алгоритм көрсетілмеген;
Басқару бөлігінің кіріс сигналдары:
X_i параметрінің ХТ алғашқы түрлендіргішінің X_i-аналогты сигналы;
НА сыртқы тапсырғыш құрылымының аналогты сигналы;
ТС кірісінде өлшенетін, Х_пр аралық параметрінің алғашқы турлендіргішінің аналогты сигналы (ИМПС ке еңгізілген GT алғашқы түрлендіргіштің аналогты сигналы)
8.2 – Сурет. АЛС статикалық немесе астатикалық инерционды объектердің шығысында δ≠0 статикалық қателік кезінде X_i параметрінің тұрақтандыру есебін іске асыру
Ескерту. Х_пр аналогты сигнал (GT алғашқы түрлендіргіштің аналогты сигналы) δ≠0 статикалық қателіктің керек өлшемін қажет ететін П-заң реттеуіштерін іске асыратын теріс кері байланыс контурын құрады.
С-дискретті кіріс сигналының АСР жұмыс күйі.
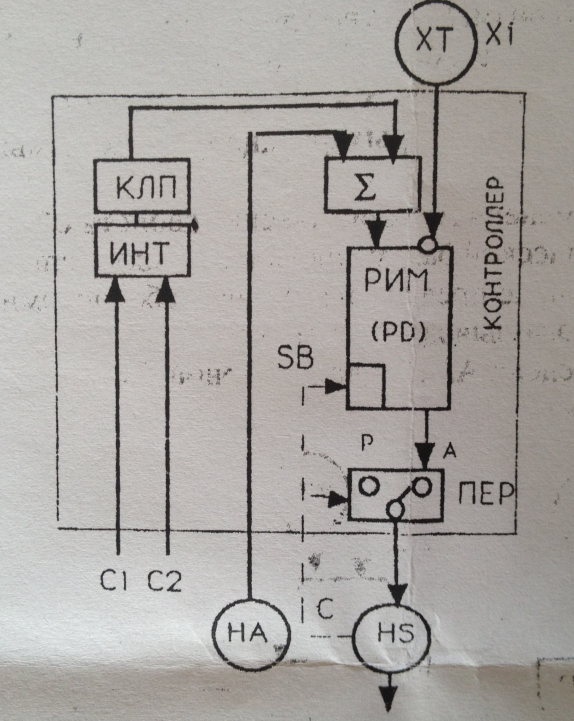
8.2.3 АЛС 1-иерархиялық деңгейінің астатикалық инерционды объектердің шығысында δ=0 статикалық қателік кезінде X_i параметрінің тұрақтандыру есебін іске асыру.
Есеп бірконтурлы АСР П-реттеуішінің көмегімен және сыртқы ашудың мәні бойынша сигналды енгізіп, статикалық қателікті компенсациялайды іске асырылады.
АЛС басқару бөлігі 8.3-суретте көрсетілген.
8.3-сурет. Бірконтурлы АСР АЛС 1-иерархиялық деңгейінің астатикалық инерционды объектердің шығысында δ=0 статикалық қателік кезінде X_i параметрі.
Есептің ақпараттық камтамасыздануы:
X_i параметрінің ХТ алғашқы түрлендіргішінің аналогты сигналы;
Х_пр аралық параметрінің алғашқы турлендіргішінің аналогты сигналы;
Сыртқы ашуды сипаттайтын, Х_вн параметрінің алғашқы турлендіргішінің аналогты сигналы;
НА сыртқы тапсырғыш құрылымының аналогты сигналы;
АСР ді жұмысқа келтіретін С дискретті кіріс сигналы.
Сыртқы тапсырма мен Х_вн сигналының қосындысы келесі алгоритмімен іске асады
Шығысы
тікелей РИМ алгоритм кірсіне байланысты
 сигналдардың қосындысымен және сыртқы
тапсырмасы СУМ-1 алгоритмымен іске
асады. Инверстік кіріс алгоритмі РИМ
контрукциясы бойынша СУМ-2 алгоритмімен
және барлық сигналдар қосындысы
сигналдардың қосындысымен және сыртқы
тапсырмасы СУМ-1 алгоритмымен іске
асады. Инверстік кіріс алгоритмі РИМ
контрукциясы бойынша СУМ-2 алгоритмімен
және барлық сигналдар қосындысы
 және
және
 іске асады.
іске асады.
8.2.4
АЛС
 болғандағы
орнықты параметірінің кірсіндегі
статикалық-инерциондық объектінің 1-ші
иерархиялық басқару деңгейінің
болғандағы
орнықты параметірінің кірсіндегі
статикалық-инерциондық объектінің 1-ші
иерархиялық басқару деңгейінің
 сыртқы
ауытқудағы конпенциалды динамикалық
қателіктерді орындау үшін қажет. Бұл
есеп бірконтурлы АСР
сыртқы
ауытқудағы конпенциалды динамикалық
қателіктерді орындау үшін қажет. Бұл
есеп бірконтурлы АСР
 қосымша енгізілген сигналы бар
ПИ(ПИД)-регуляторы көмегімен орындалады.
қосымша енгізілген сигналы бар
ПИ(ПИД)-регуляторы көмегімен орындалады.
8.4 суретте АЛС-ның басқарылған бөлігі көрсетілген.
8.4 сурет АЛС бірконтурлы АСР-ның сыртқы ауытқу кезіндегі динамикалық қателіктің компециалды парамері
синалын қалыптастыру үшін мәнін сипаттайтын кіріс сигналынан бірінші түрлендіргіш параметрі бар ДИФ типтік алгоритмді қолданамыз.
сигналдардың қосындысы және сыртқы берілетін құрылғысы РИМ кіріс алгоритміне тікелей түседі.
шамасындағы сигнал тікелей РИМ инверсті кіріс алгоритміне түседі.
8.4.5 АЛС болғандағы орнықты параметірінің кірсіндегі статикалық-инерциондық объектінің 1-ші иерархиялық басқару деңгейінің сыртқы ауытқудағы конпенциалды динамикалық қателіктерді орындау үшін қажет.
Бұл есеп бірконтурлы АСР басқарылатын әсердің канал бойымен өтуіндегі ішкі ықпалын сипаттайтын параметрі аралық мәні бойынша икемді теріс кері байланысымен қолданылатын ПИ(ПИД)-регуляторы көмегімен орындалады .
АЛС-ның басқарушы бөлігі 6.5суретінде көрсетілген

8.5
сурет АЛС бірконтурлы АСР-ның
 сыртқы
ауытқу кезіндегі динамикалық қателіктің
компециалды
парамері
сыртқы
ауытқу кезіндегі динамикалық қателіктің
компециалды
парамері
РИМ
инверсивті кіріс алгоритміне
 сигналдардың қосындысы түседі.
сигналдардың қосындысы түседі.
8.2.6 АЛС болғандағы орнықты параметірінің кірсіндегі статикалық-инерциондық объектінің 1-ші иерархиялық басқару деңгейінің сыртқы ауытқудағы және ішкі ауытқудағы конпенциалды динамикалық қателіктерді орындау үшін қажет.
Бұл есеп бірконтурлы АСР басқарылатын әсердің канал бойымен өтуіндегі ішкі ықпалын сипаттайтын параметрі аралық мәні мен су сигналы бойынша икемді теріс кері байланысымен қолданылатын ПИ(ПИД)-регуляторы көмегімен орындалады .
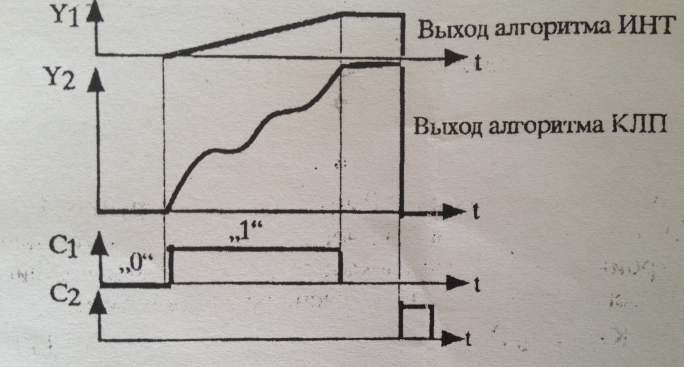
КЛП стандарты алгоритмі және НА сыртқы беруші құрылғы арқылы қосынды сигнал РИМ алгоритмінің тікелей кірісіне белгілі уақыттық тәуелділікпен берілу арқылы , АРЖ-нің тапсырмасын өзгерту функциясын іске асыру жүзеге асады.
КЛП алгоритмінің кірісі ИНТстандарты алгоритімінің шығысымен байланысты, ол х1=const кіріс анологты сигналдың интеграциясын жүзеге асырады.
Сурет 8.10 Хi программалық реттегіш АЛС
ИНТ стандартты алгоритмі сыртқы дискретті С1 сигналдармен("1"-интеграция болуы,"0"-интеграцияны тоқтату ) және С2 (ИНТ алгоритмінің шығыс сигналының бастапқы мәні ) басқарылады.
Белгілі бағдарлама арқылы АРЖ-нің тапсырмасының өзгерісінің уақыттық диаграммасы 8.11 сурет.
Сурет 6.11 Тапсырманың бағдарламалық өзгерісінің уақыттық диаграммасы
Бақылау сұрақтары мен тапсырмалары
8.4.1. Хi параметрінің бағдарламалық реттеуішін қалай ұйымдастыруға болады?
8.4.2. АЛС -тің басқа бағдарламалық өзгеріс нұсқасын көрсетіңіз.
8.5АРЖ-нің функционалды мүмкіндіктерін кеңейту.
Автоматты басқару функциясының құрамына, қаралған АЛС -дің қолданумен жұмыс атқаратын әртүрлі АРЖ, белгілі эксплуатациондық жағдайларда жеткілікті емес, жекелей қарағанда процессті іске қосқанда және технологиялық құрылғылардың өтпелі жұмысы кезінде.
Осы мақсатта АРЖ-нің пусктті және барлық режимдегі алгоритмдері, бастыларынан басқасы, автоматтандыру тапсырмаларын кеңейту үшін келесі функцияларды орындайды:
- Басқару обьектісінің динамикалық қасиеттерінің өзгерісіне АРЖ-нің бейімделуі;
- РАН(РИМ) басты алгоритмін статикалық балансты автоматтандыру, егер жасаушылармен берілген функция жайлы мәліметтер қаралмаған болса;
- АРЖ және т.б. кіріс-шығыстарын автоматтандыру.
8.12 суреттінде бірконтурлы АРЖ функционалды мүмкіндіктерімен берілген АЛС көрсетілген.

Сурет 8.12 бірконтурлы АРЖ функционалды басқару кеңейюмен берілген АЛС көрсетілген.
Автоматты түйістіру көмегімен АРЖ-нің айнамалылардың динамикалық қасиеттеріне бейімделуі, мысал үшін есептік тәуелділікті пайдаланып, КП ПИ(ПИД) -регулятордың тұйықталмаған коэффициент көмегімен:
КП=f(ХВН ), (6.1)
мұндағы, ХВН - бірінші ретті
9 Лекция.ТЕХНОЛОГИЯЛЫҚ ПРОЦЕССТІ ДИСКРЕТТІ ЛОГИКАЛЫҚ БАСҚАРУДЫҢ ІШКІ ЖҮЙЕСІНІҢ АЛГОРИТМІ