

Теоретическая Механика
ТЕОРИЯ
Билет1. Геометрический способ сложения сил. Геометрическое и аналитическое условия равновесия системы сходящихся сил.
П усть
к телу в точках А, В, С, D
приложены силы
усть
к телу в точках А, В, С, D
приложены силы
 ,
ЛД которых пересекаются в точке О
(рисунок 1.1 а). Перенесем силы вдоль их
ЛД в точку О и будем последовательно
складывать силы по правилу силового
треугольника (рисунок 1.1 б). Сначала
найдем равнодействующую
,
ЛД которых пересекаются в точке О
(рисунок 1.1 а). Перенесем силы вдоль их
ЛД в точку О и будем последовательно
складывать силы по правилу силового
треугольника (рисунок 1.1 б). Сначала
найдем равнодействующую
 сил
сил
 и
и
 ,
затем
,
затем
 сил
и
сил
и
 и т.д. Получим следующее:
и т.д. Получим следующее:
 ,
,
 ,
,
 =
= .
Если сил n, то
.
Если сил n, то
можно определить
также, отложив вектор
 и приложив к его концу вектор
и приложив к его концу вектор
 ,
затем к концу
- вектор
,
и т.д. Равнодействующая
соединяет начало первого вектора с
концом последнего.
,
затем к концу
- вектор
,
и т.д. Равнодействующая
соединяет начало первого вектора с
концом последнего.
Т.о., равнодействующая системы сходящихся сил равна векторной сумме сил, входящих в систему, и ее ЛД проходит через точку пересечения ЛД слагаемых сил. Чтобы найти равнодействующую геометрическим способом, надо построить в точке пересечений их ЛД силовой многоугольник на слагаемых силах; замыкающая силового многоугольника будет равнодействующей.
Рассмотрим аналитический способ определения равнодействующей системы сходящихся сил. Спроецируем векторное равенство на оси прямоугольных координат и найдем проекции равнодействующей
 ,
,
 ,
,
 .
.
Модуль равнодействующей силы определяется, как
а направление - по трем направляющим косинусам
 ,
,
 ,
,
 .
.
Для
равновесия системы сходящихся сил
необходимо и достаточно, чтобы ее
равнодействующая была равна нулю, т.е.,
 или
или
 (условия равновесия в векторном виде).
Условия равновесия в геометрическом
смысле выражаются в том, что силовой
многоугольник должен быть замкнут,
т.е., конец последнего вектора должен
совпасть с началом первого вектора. В
аналитическом виде они
выражаются в том, что должны равняться
нулю суммы проекций на три координатные
оси всех сил, входящих в систему
(условия равновесия в векторном виде).
Условия равновесия в геометрическом
смысле выражаются в том, что силовой
многоугольник должен быть замкнут,
т.е., конец последнего вектора должен
совпасть с началом первого вектора. В
аналитическом виде они
выражаются в том, что должны равняться
нулю суммы проекций на три координатные
оси всех сил, входящих в систему
 ,
,
 ,
,
 .
.
Условия равновесия для плоской системы сходящихся сил
, .
Теорема о трех силах: если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
Билет2. Момент силы относительно центра и оси. Пара сил. Момент пары сил.
Моментом
силы
 относительно оси называется проекция
векторного момента этой силы, взятого
относительно любой точки оси, на эту
ось, т. е.
относительно оси называется проекция
векторного момента этой силы, взятого
относительно любой точки оси, на эту
ось, т. е.

 .
.
Проекция на ось момента силы , взятого относительно какой-либо точки О этой оси Oz, не зависит от положения точки на оси.
Иначе: момент силы относительно оси - это алгебраический момент проекции этой силы на плоскость, перпендикулярную оси, взятый относительно точки пересечения оси с плоскостью (рисунок 2.2)
 .
.
Момент
силы относительно оси равен нулю, если
сила и ось находятся в одной плоскости. Момент
силы относительно начала координат
 равен по (2.1.1)
равен по (2.1.1)
 ,
,
откуда получим моменты силы относительно осей координат
 ,
,
 ,
,
 .
.
П арой
сил,
приложенной к АТТ, называют систему
двух равных по модулю параллельных сил,
направленных в противоположные стороны
(рисунок 2.3). Сумма
сил пары равна нулю,
но пара сил не уравновешена. Кратчайшее
расстояние между ЛД сил пары называют
плечом
пары,
а плоскость, в которой действуют силы
пары - плоскостью действия пары.
Совокупность нескольких пар сил,
действующих на тело, называется
системой пар сил.
арой
сил,
приложенной к АТТ, называют систему
двух равных по модулю параллельных сил,
направленных в противоположные стороны
(рисунок 2.3). Сумма
сил пары равна нулю,
но пара сил не уравновешена. Кратчайшее
расстояние между ЛД сил пары называют
плечом
пары,
а плоскость, в которой действуют силы
пары - плоскостью действия пары.
Совокупность нескольких пар сил,
действующих на тело, называется
системой пар сил.
Действие
пары на тело характеризуется моментом
пары
 ,
равным
±F∙d,
а также положением плоскости действия
пары в пространстве и направлением, в
котором пара стремится вращать тело,
т.о., момент пары сил есть вектор.
,
равным
±F∙d,
а также положением плоскости действия
пары в пространстве и направлением, в
котором пара стремится вращать тело,
т.о., момент пары сил есть вектор.
Векторный
момент пары сил
- это вектор
 ,
перпендикулярный плоскости действия
пары и направленный в ту сторону, откуда
видно, что пара стремится повернуть
тело против часовой стрелки, и численно
равный произведению модуля одной из
сил пары на ее плечо. Пару сил можно
переносить куда угодно в плоскости и в
параллельную плоскость, изменяя модуль
силы и плечо пары, но, сохраняя при этом
неизменными модуль момента пары и
направление, в котором она стремится
вращать твердое тело, т.е. пара сил –
свободный вектор.
,
перпендикулярный плоскости действия
пары и направленный в ту сторону, откуда
видно, что пара стремится повернуть
тело против часовой стрелки, и численно
равный произведению модуля одной из
сил пары на ее плечо. Пару сил можно
переносить куда угодно в плоскости и в
параллельную плоскость, изменяя модуль
силы и плечо пары, но, сохраняя при этом
неизменными модуль момента пары и
направление, в котором она стремится
вращать твердое тело, т.е. пара сил –
свободный вектор.

Б илет3.
Приведение системы сил к центру. Теорема
о параллельном переносе сил.
илет3.
Приведение системы сил к центру. Теорема
о параллельном переносе сил.
Теорема о моменте равнодействующей.
Произвольную систему сил, действующих на АТТ, можно привести к какому-либо центру, заменив все действующие силы одной силой, равной главному вектору системы сил, приложенному в этом центре, и одной парой сил с моментом, равным главному моменту системы сил относительно того же центра (рисунок 2.5)
 .
.
При
этом
 не зависит от выбора центра приведения,
а
не зависит от выбора центра приведения,
а
 – зависит.
– зависит.
Две системы сил, приложенных к АТТ, эквивалентны, если они имеют одинаковые главные векторы и главные моменты относительно одного и того же центра.
Теорема о параллельном переносе силы
Силу, приложенную к твердому телу, можно, не изменяя ее действия, перенести параллельно самой себе в любую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, в которую она переносится (рисунок 2.4).
Теорема о моменте равнодействующей.
Теорема Вариньона:
-
Если система сил, приложенных к абсолютно твердому телу, имеет равнодействующую, то момент равнодействующей относительно произвольного центра (оси) равен сумме моментов всех сил системы относительно того же центра (оси).
Векторная
запись теоремы:
 .
.
Билет4. Плоская система сил. Приведение плоской системы сил к простейшему виду. Равновесие плоской системы сил.
Если все силы, действующие на твердое тело, лежат на одной плоскости, выберем систему координат xOy в плоскости действия сил (рисунок 2.1). В этом случае обнаружим, что
![]()
Далее, вспомнив определение момента силы относительно оси, замечаем, что сумма моментов всех сил относительно оси z равна алгебраической сумме моментов этих сил относительно начала координат, т.е. точки О. В результате останутся следующие три аналитические условия равновесия:

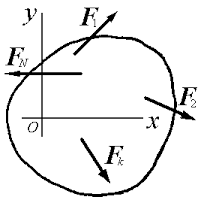
Рисунок 2.
Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей x и y и сумма моментов всех сил относительно любой точки, лежащих в плоскости действия сил, были равны нулю.
Произвольной плоской системой сил называется совокупность сил, линии действия которых находятся в одной плоскости.
Главным вектором системы сил называется вектор, равный векторной сумме этих сил:
R = ΣFk.
Главным моментом системы сил относительно точки O тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки:
Mo = ΣMo(Fk).
Приведение плоской системы сил к простейшему виду.

Рассмотрим систему сил (F1, F2,..., Fn), расположенных в одной плоскости. Совместим с плоскостью расположения сил систему координат Оху и, выбрав ее начало в качестве центра приведения, приведем рассматриваемую систему сил к одной силе F0=åFk, (5.1) равной главному вектору, и к паре сил, момент которой равен главному моменту M0=åM0(Fk), (5.2) где Мо(Fk)– момент силы Fk относительно центра приведения О. Так как силы распол в одной пл-ти, то сила Fo также лежит в этой плоскости. Момент пары Мо направлен перпендикулярно этой плоскости, т.к. сама пара распол в пл-ти действия рассматриваемых сил. Т.о., для плоской системы сил главный вектор и главный момент всегда перпендикулярны друг другу (рис. 5.1). Момент полностью характеризуется алгебраической величиной Mz, равной произведению плеча пары на величину одной из сил, составляющих пару, взятой со знаком плюс, если «вращение-» пары происходит, против хода часовой стрелки, и со знаком минус, если оно происходит по ходу часовой стрелки.
Равновесие плоской системы сил
Как известно, необходимыми и достаточными условиями равновесия плоской произвольной системы сил являются равенства нулю ее главного вектора и главного момента.
Существуют
три формы уравнений равновесия плоской
системы сил.
Первую
форму
получим, спроектировав на оси координат
векторное равенство
![]() и присоединив к получившимся двум
уравнениям равенство
и присоединив к получившимся двум
уравнениям равенство
![]() ,
выражающее
условие равенства нулю главного момента:
,
выражающее
условие равенства нулю главного момента:
![]() ,
,
![]() ,
,
![]() .
.
Первые
два уравнения называются уравнениями
проекций сил на оси координат,
третье - уравнением
моментов.
Точка
![]() может быть выбрана произвольно.
может быть выбрана произвольно.
Легко доказать, что необходимые и достаточные условия равновесия плоской системы сил могут быть записаны еще в двух формах.
Вторая
форма:
,
![]() ,
,
![]() ,
,
где
ось проекций
![]() должна быть не перпендикулярна к отрезку
должна быть не перпендикулярна к отрезку
![]()
Третья
форма:
,
,
![]() ,
,
где
точки
![]() не должны
лежать на одной прямой.
не должны
лежать на одной прямой.
Отметим, что для любой из трех форм уравнений равновесия число независимых между собой уравнений равновесия равно трем. Задачи, в которых все неизвестные могут быть определены из уравнений равновесия твердого тела, называются статически определенными. Если же неизвестных больше, чем этих уравнений, то задача оказывается статически неопределенной.
Билет5. Трение. Законы трения скольжения. Реакции связей. Угол трения. Трение качения.
Трение в машинах играет существенную роль. В передаточных механизмах — фрикционных, канатных, ременных и др. — передача движения от ведущего звена к ведомому осуществляется трением. В других случаях трение препятствует движению, поглощая значительную часть работы движущих сил.
Законы трения скольжения:
1. Сила трения скольжения прямо пропорциональна силе нормального давления:
Fтр = Ff = f R,
где R — сила нормального давления, направлена перпендикулярно опорной поверхности;
f — коэффициент трения скольжения.
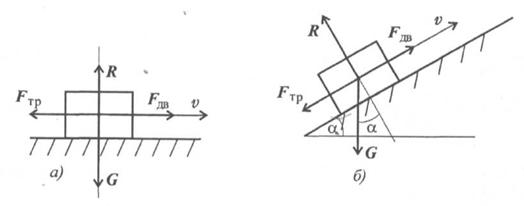
Рис. 13.3
В случае движения тела по наклонной плоскости (рис. 13.3 б))
R = G cos α,
где а — угол наклона плоскости к горизонту.
Сила трения всегда направлена в сторону, обратную направлению движения.
2. Сила трения меняется от нуля до некоторого максимального значения, называемого силой трения покоя (статическое трение):
0 < Ff ≤ Ff0,
где Ff0 — статическая сила трения (сила трения покоя).
3. Сила трения при движении меньше силы трения покоя. Сила трения при движении называется динамической силой трения (Ff):
Ff ≤ Ff0,
Поскольку сила нормального давления, зависящая от веса и направления опорной поверхности, не меняется, то различают статический и динамический коэффициенты трения:
Ff = f R, Ff0 = ff0R.