

Неустойчивое : Если система будет смещена на небольшое расстояние, то она продолжит своё движение за счёт сил, действующих на систему.
Устойчивое равновесие : Если систему сместить на небольшое расстояние, она вернётся назад в состояние равновесия.
Безразличное равновесие : Если система будет смещена на небольшое расстояние, она останется в новом положении.
21.2 Условия : Механическое равновесие - состояние механической системы, при котором сумма всех сил, действующих на каждую её частицу, равна нулю и сумма моментов всех сил, приложенных к телу относительно любой оси вращения равна нулю.
22. Момент и плечо силы. Пара сил.
М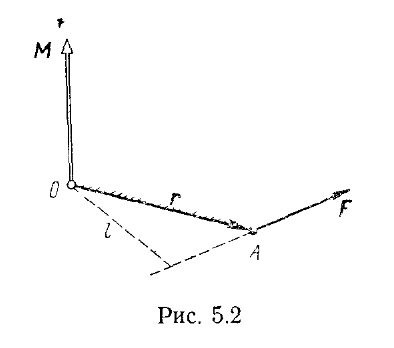 оментом
силы
F
относительно точки О называется векотор
оментом
силы
F
относительно точки О называется векотор
![]() ,равный
веторному призведению векторов
и
.
,равный
веторному призведению векторов
и
.
![]() =[
=[![]() ,
, ![]() ]
]
![]() - аксиальный вектор.
- аксиальный вектор.
Модуль : | M | = l . F
Где : l – Плето силы относительно точки О.


Уравнение
моментов
:
= ![]()
где
![]() - момент импульса.
- момент импульса.
L=lp=lmv
Где : l – Плето силы относительно точки О.
Пара силы
Две равные паралельные силы F1 и F2 , направленных в противоположные стороны, такие силы образуют пару сил.
![]()
23. Момент импульса. Момент импулься механической системы.
М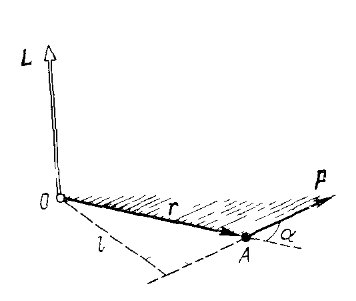 омент
импульса тела относительно
точки О называют
омент
импульса тела относительно
точки О называют ![]() ,
равный векторному произведению векторов
и
.
,
равный векторному произведению векторов
и
.
= [ , ]
- аксиальный вектор
Модуль
L
= rp
sin![]() = lp
= lp
Где : l-плечо вектора относительно точки О.
Момент импульса системы
![]() =
= ![]() - Момент
импульса L
равен сумме моментов импульсов частей
Li
- Момент
импульса L
равен сумме моментов импульсов частей
Li
24. Теорема об изменении момента импульса системы. Закон сохранения момента импульса системы. Момент импульса относительно оси. Момент импульса относительно подвижного начала и подвижной оси.
24.1 Теорема об изменении момента импульса системы
Изменение момент импульса системы - =
– величина аддитивная - Момент импульса системы равен сумму моментов импульсов отдельных частей i
По
времени : ![]() =
= ![]() =
= ![]() +
+
![]()
Где
![]() - суммарный момент внутренних сил
относительно точки О
- суммарный момент внутренних сил
относительно точки О
![]() - суммарный момент внешних сил относительно
точки О
- суммарный момент внешних сил относительно
точки О
Относительно
любой точки ![]() = 0 →
=
= 0 →
= ![]() → L2
– L1
=
→ L2
– L1
= ![]()
(производная момента импульса системы по времени равна сумме моментов всех внешних сил)
24.2 закон сохранения момента импульса системы
Момент импульса замкнутой системы остается постоянным
L
= ![]() = const
= const
З акон
сохранения момента импульса имеет место
только по отношению к инерциальным
системам отсчёта.
акон
сохранения момента импульса имеет место
только по отношению к инерциальным
системам отсчёта.
Прирыщение момента импульса одной части равно убыли момента импульса другой части.
24.3 Момент и импульса относительно оси
Моментом
импульса относительно оси z
называют проекцию на эту ось.
, определунного относительно произвольной
точки О данной оси ![]() = MZ
= MZ
Производная по времени от момента импульса частицы относительно оси z равно моменту силы относительно этой оси.
Если MZ = 0,то LZ = const
24.4 Момент импульса относительно подвижного начала и подвижной оси
![]() =
= ![]() =
= ![]() +
+ ![]() →
=
→
= ![]() +
+ ![]()
Где М – суммарный момент сил относительно О
М’ – суммарный момент сил относительно О’
F=
![]() - внешние силы
- внешние силы
25. Связь момента импульса с угловой скоростью. Кинетическая энергия при вращательном движении. Работа, совершаемая моментом силы.
