

3. Проверка системы двигатель-редуктор
3.1. Проверка условия пуска
Для проверки условия пуска необходимо пересчитать Мдв_max с учетом динамических и статических моментов на валу двигателя и проверить выполняется ли условие:


Мдв_max = 219.505 Нм
289.473 219.505/2,5 Нм
95,54 87.802 Нм
условие выполняется
3.2. Условие тепловой загрузки двигателя
Электрический двигатель при своей работе может нагреваться лишь до определенной, допустимой температуры, определяемой в первую очередь нагревостойкостью применяемых изоляционных материалов. Превышение допустимой температуры ведет к преждевременному разрушению изоляции обмотки и сокращению срока службы электрических двигателей. Для предотвращения этого необходимо проверить двигатель на условие тепловой загрузки. Воспользуемся методом эквивалентного момента, который заключается в расчете среднеквадратичного момента двигателя за рабочий цикл Mэ:

Условие тепловой загрузки:
Мэ
=
 = 209.47 Нм
= 209.47 Нм
2
условие выполняется
89.473 209.474. Расчет и выбор преобразователя
Тип преобразователя должен соответствовать типу двигателя. Для двигателя постоянного тока требуется тиристорный преобразователь напряжения (по заданию), а для двигателей переменного – транзисторный.
Выбранный преобразователь должен соответствовать следующим условиям:
1) Требуемая мощность преобразователя
2) В грузоподъемных механизмах циклического действия преобразователь рассчитывается на средний ток Iск за два цикла:

3) Напряжение преобразователя должно соответствовать следующему условию:

Выбираем, преобразователь из каталога по первому условию, далее выполняется проверка по остальным:
Преобразователь ATV66FD23
1)
 1693.86 Вт
1693.86 Вт
2)
 28.83
А
28.83
А
3)
 220
В
220
В
Выписываем номинальные параметры двигателя из каталога:
Iпр_ном = 33 А – номинальный ток
Uпр_ном = 400 В – номинальное напряжение питания
Pпр_ном = 15 000 кВт – номинальная мощность
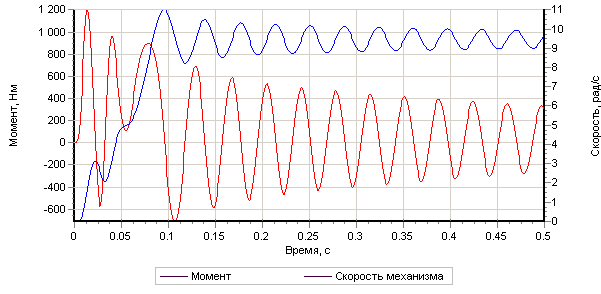
5. Моделирование разомкнутой системы
Выбор оборудования завершается моделированием разомкнутой системы преобразователь-двигатель-механизм. Моделирование разомкнутой системы необходимо для проверки выполненных расчетов и выбранного оборудования. В результате этого можно оценить установившуюся скорость, время разгона, ускорение и степень использования оборудования. Для построения модели используем программу eDrive.


Редуктор: Ц2-250
Двигатель:4A200L
Преобразователь ATV66FD23

Блок-схема разомкнутой системы
6. Проектирование системы управления
Для правильной работы подъемника необходимо управлять двумя его параметрами: скоростью и углом поворота вала двигателя (положением).Скорость необходимо регулировать для получения движения с заданной скоростью и требуемых динамических показателей переходного процесса (время разгона, время движения, время торможения). Регулирование положение груза необходимо для того, чтобы груз останавливался на определенной высоте. Для моделирования замкнутой системы электропривода с контуром скорости и положения следует рассчитать параметры регуляторов и датчиков.
Блок схема замкнутой системы управления электропривода с контурами скорости и положения:
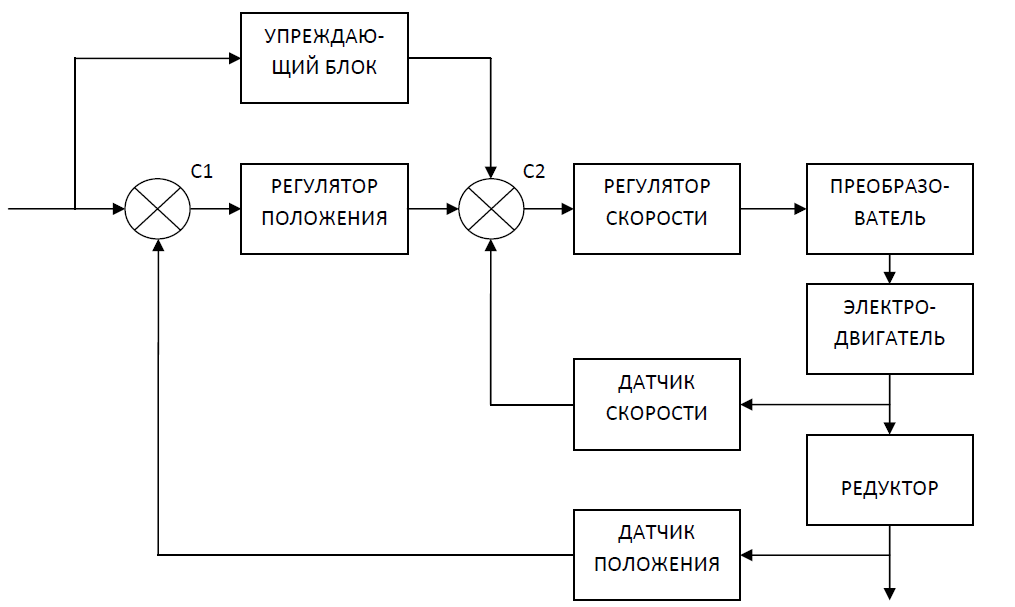
На сумматор С1 системы поступает сигнал от задатчика положения (угла поворота) и сигнал обратной связи с датчика положения. На выходе сумматора С1 появляется сигнал рассогласования (ошибки) по положению, который поступает на регулятор положения. На выходе регулятора формируется регулирующее воздействие, которое поступает на сумматор 2. На этот же сумматор поступаю сигналы с упреждающего блока (этот блок нужен для компенсации скоростной ошибки) и обратной связи с датчика скорости. На выходе сумматора С2 формируется сигнал рассогласования и подается на вход регулятора скорости. На выходе регулятора скорости формируется регулирующее воздействие, которое подается на тиристорный преобразователь напряжения, который управляет электродвигателем постоянного тока.Таким образом, из блок-схемы видно, что система состоит из двух контуров: внутреннего – контура скорости и внешнего – контура положения. Так как при расчете регуляторов будет сделано много допущений, то регуляторы потребуют дополнительной наладки на модели. Расчет параметров следует начинать с внутреннего контура – контура скорости. После приблизительного расчета следует смоделировать систему с одним контуром и произвести ее наладку (если это необходимо). Затем произвести расчет внешнего контура – контура положения – и смоделировать систему с двумя контурами и произвести окончательную наладку.