

ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ
ИНСТИТУТ ЭКОНОМИКИ, УПРАВЛЕНИЯ И ИНФОРМАЦИОННЫХ СИСТЕМ В СТРОИТЕЛЬСТВЕ (ЭУИС)
КАФЕДРА АВТОМАТИЗАЦИИ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ ТЕХНОЛОГИЙ (АИСТ)
Курсовая работа
по дисциплине: "Технические средства автоматизации"
на тему: «Бесконтактная схема силового кулачкового контроллера ККТ 69А»
Выполнил студент: Смородин А.В.
ИСТАС 4-4
Проверил: Макарова И.А.
Москва, 2013
Введение
Целью данной курсовой работы является преобразование релейно-контактной схемы управления механизмом подъема крана, с использованием силового кулачкового контроллера ККТ 69А, в бесконтактную. Преобразования требуется произвести с сохранением условий работы схемы установки, силовых пускателей, контакты которых коммутируют силовую схему и непосредственно самого силового контроллера. Бесконтактная схема, в отличие от релейно-контактной, характеризуется следующими достоинствами:
-бесконтактное оборудование более дешевое;
-бесконтактное оборудование характеризуется более высокой надежностью;
-увеличивается срок службы установки и т.д.
1. Технологическая часть
Силовые кулачковые контроллеры относятся к категории аппаратов ручного управления. Они предназначаются для непосредственного управления двигателями постоянного и переменного тока различных грузоподъемных машин.
Простота конструкции и безотказность в работе, а также минимально возможные габариты относительно сложного коммутационного устройства предопределили широкое распространение силовых кулачковых контроллеров для электроприводов кранов с невысокими требованиями по износостойкости.
Основой конструкции
контроллеров кулачкового типа является
блок коммутационных элементов с
кулачковым валом, размещенным в
алюминиевом корпусе. Крышки выполняются
из алюминиевых сплавов. Максимальное
число контактных элементов - 12. При этом
предусматривается двухрядное расположение
элементов - по шесть в каждом ряду.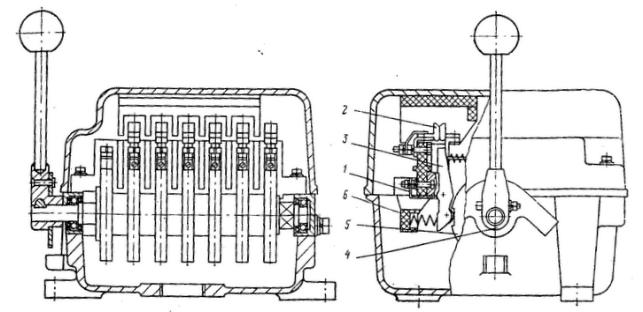
Рисунок 1.1 - Общий вид кулачкового контроллера серии ККТ 60А
Основные конструктивные решения, принятые для крановых кулачковых контроллеров, видны на Рисунке 1.1, на котором показан общий вид кулачкового контроллера серии ККТ 60А. У контроллеров этой серии коммутационные элементы размещаются на двух пластмассовых рейках 6. Привод элементов осуществляется с помощью кулачковых шайб, смонтированных на барабане 5. Каждая из шайб управляет одновременно двумя кулачковыми элементами, размещенными на 2-х рейках. Кулачковые шайбы имеют определенный профиль для создания необходимой последовательности коммутации пары контактных элементов. Поворот кулачкового барабана производиться рукояткой 4. Главные контакты 2 контроллера выполнены из меди. Неподвижные контакты укреплены непосредственно на пластмассовых рейках, а подвижные контакты установлены на контактных рычагах 3 с шарнирно-пружинной связью между рычагом и контактом. Электрическая связь подвижных контактов с выводными зажимами осуществляется через гибкое соединение.
При набегании гребня кулачковой шайбы на ролик контактного рычага последний поворачивается и контакты размыкаются. Наоборот, при сходе ролика с гребня шайбы рычаг под действием возвратной пружины переводит контакты в замкнутое состояние. Такая система обеспечивает высокую надежность коммутации, поскольку даже при приваривании главных контактов они механически отрываются при повороте вала барабана. Профиль гребня кулачковых шайб и устройства фиксирования рабочих положений вала контроллера (состоит из храповика и фиксатора) обеспечивает эффективную установку вала в рабочие положения контроллера и исключение такого положения главных контакторов, когда они не имеют определенного коммутационного состояния.
Угол поворота вала и размеры кулачковых шайб выбраны с таким расчетом, чтобы при предельном износе движущихся элементов и возможных производственных допусках сохранилась заданная программа замыкания контактов.
Коммутация тока контактами контроллера естественная, без дугогасительных устройств. Для предотвращения перебросов дуги между элементами при размыкании больших токов с внутренней стороны крышки контроллера укреплены камеры, отделяющие коммутационные зоны элементов друг от друга.
Регулирование скорости по ступеням осуществляется: в сторону подъема путем простого изменения сопротивления резисторов в цепи ротора, в сторону спуска - путем изменения сопротивления в цепи ротора двигателя, работающего в режиме динамического торможения с самовозбуждением.
Принцип динамического торможения с самовозбуждением основан на подключении статора электродвигателя к выпрямленному напряжению ротора. От обычной схемы динамического торможения схема с самовозбуждением отличается автоматической зависимостью тока возбуждения от нагрузки электродвигателя, а также отсутствием понизительного трансформатора.
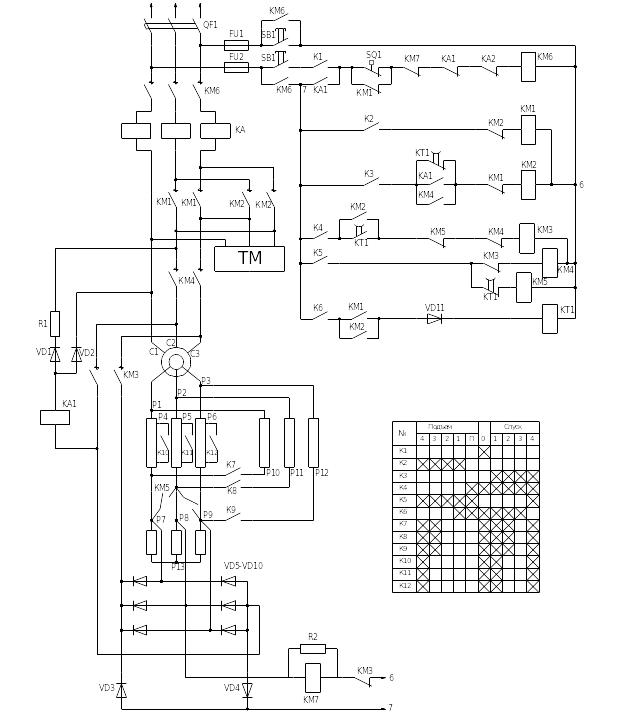
Рисунок 1.2 - Схема кулачкового контроллера ККТ 69А