

Принцип действия электрических машин. Назначение основных частей
Электрические машины — это электромеханические преобразователи, в которых осуществляется преобразование электрической энергии в механическую или механической в электрическую. Основное отличие электрических машин от других преобразователей в том, что они обратимы, т. е. одна и та же машина может работать в режиме двигателя, преобразуя электрическую энергию в механическую, и в режиме генератора, преобразуя механическую энергию в электрическую.
По виду создаваемого в машинах поля, в котором происходит преобразование энергии, электрические машины подразделяются на индуктивные, емкостные и инуктивно-емкостные. Современные электрические машины — индуктивные. Преобразование энергии в них осуществляется в магнитном поле. Емкостные электрические машины, хотя и были изобретены задолго до индуктивных, до сих пор не нашли практического применения из-за сложности создания достаточно мощного электрического поля, в котором происходит преобразование энергии. В практике эти машины еще не применяются, поэтому в дальнейшем будем рассматривать только индуктивные электрические машины.
Для того чтобы электрическая машина работала, в ней должно быть за счёт индуктора создано основное магнитное поле, в котором будут располагаться проводники обмотки якоря. Взаимодействие проводников обмотки якоря и основного магнитного поля (потока) машины при их взаимном перемещении и является основой преобразования энергии.
Для того чтобы МДС, необходимая для создания магнитного поля, не была чрезмерно велика, статор и ротор электрической машины выполняют из ферромагнитного материала, магнитная проводимость которого во много раз больше, чем проводимость воздуха (μст»μ0). При этом магнитные силовые линии поля замыкаются по магнитопроводу машины и практически не выходят за пределы ее активных частей.
Непременным условием преобразования энергии является изменение потокосцепления обмоток в зависимости от взаимного положения ее частей: неподвижной - статора и подвижной - ротора. Для преобразования энергии в подавляющем большинстве электрических машин используется вращательное движение.
Классификация электрических машин
В зависимости от рода потребляемого или отдаваемого в сеть тока электрические машины подразделяются на машины переменного и постоянного тока.
Машины переменного тока делятся на синхронные, асинхронные и коллекторные.
Большинство машин постоянного тока — это коллекторные машины. Коллектор, вращающийся на одном валу с якорем, и неподвижный щеточный аппарат служат для преобразования постоянного тока сети в переменный ток якоря (в двигателях) или переменного многофазного тока якоря в постоянный ток сети (в генераторах постоянного тока). В последние годы получили распространение также бесколлекторные машины постоянного тока с вентильным управлением, в которых механический преобразователь частоты заменен преобразователем частоты на полупроводниковых элементах.
Преобразование энергии в электрических машинах
Электромеханическое преобразование энергии сопровождается обязательным преобразованием электрической или механической энергии в тепловую. Преобразование энергии в теплов электрических машинах принято называть потерями, так как тепловая энергия при эксплуатации электрических машин, как правило, не используется в практических целях
Для общего представления о работе машины как преобразователя энергии ее можно представить в виде шестиполюсника (см. рис), у которого есть два электрических вывода U, I, два механических вывода М, п и два тепловых Q, t.

Рис. Электрическая машина как шестиполюсник.
Электрические выводы связаны с электрической мощностью PЭ и характеризуются напряжением U и током I; механические связаны с механической мощностью и характеризуются моментом на валу машины М и частотой ее вращения п; тепловые выводы связаны с потерями энергии, возникающими в процессе преобразования, и характеризуются количеством выделенного тепла Q и температурой частей электрической машины t.
При работе электрической машины генератором механическая энергия подводится к валу, т. е. к механическим выводам М, п (рис. 1.6), а электрическая энергия снимается с выводов U, I. При работе двигателем энергия подается на электрические выводы, а снимается с механических - M и n.
Помимо двигательного или генераторного режима электрические машины могут работать также в тормозном и трансформаторном режимах.
По характеру нагрузки и частоте вращения ротора различают также режимы нагрузки, холостого хода и короткого замыкания машины.
При холостом ходе нагрузка на валу в двигательном режиме или электрическая нагрузка на выводах в генераторном режиме равна нулю.
В режиме короткого замыкания генераторов сопротивление нагрузки равно нулю. В режиме короткого замыкания двигателей равна нулю частота вращения. Режим короткого замыкания характерен для начального момента пуска двигателя из неподвижного состояния. При включении обмотки статора на номинальное напряжение ток двигателя достигает больших значений, поэтому длительный режим короткого замыкания опасен для машин, не рассчитанных на работу при таких условиях.
Описание
Электромагнитный затвор (Э/М затвор) – это устройство для преобразования энергии электромагнитного поля в механическую энергию (энергию поступательного движения). Затвор состоит из катушки индуктивности(возможно, с сердечником внутри для формирования более сильного поля), подключенной к источнику тока(элемент ИТ рисунка 1) и примагничиваемого элемента (элемент 1 рисунка 1), например, стержня из магнитного металла. При подаче тока через катушку в ней возникает магнитное поле, которое начинает притягивать металлический элемент к себе, “перекачивая” свою электромагнитную энергию в его механическую энергию. При отключении тока поле пропадает. Без внешнего воздействия элемент постепенно размагничивается до исходного состояния, его можно вернуть в исходное положение (например, с помощью силы тяжести, силы упругости пружины и т.д.). Материал притягиваемого элемента удобно делать магнитно-мягким (т.е. теряющим через некоторое время приобретенную во внешнем поле намагниченность), чтобы он после некоторого количества циклов включения/выключения затвора не остался навсегда примагничен к катушке, но возможен и вариант с использованием постоянного магнита. При достаточно больших импульсах тока затвор может работать очень быстро, также, поскольку он имеет очень простую конструкцию, шанс затвора выйти из строя чрезвычайно мал.
Схема электромагнитного затвора
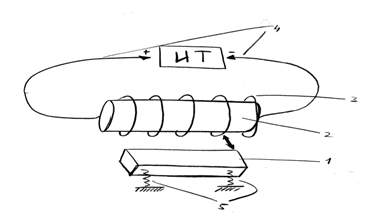
Рис.1.
Обозначения: 1 – перемагничиваемый элемент; 2 – сердечник; 3 – катушка индуктивности; 4 – соединительные провода; 5 –возвращающие элементы; ИТ – источник тока.
http://proelectro2.ru/info/id_365
Основные понятия и классификация ЭП
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного, либо поступательного движения, и включающее электромеханический преобразователь (двигатель) и устройство управления двигателем.
Один из вариантов блок-схемы ЭП приведен на рис. 17.1.
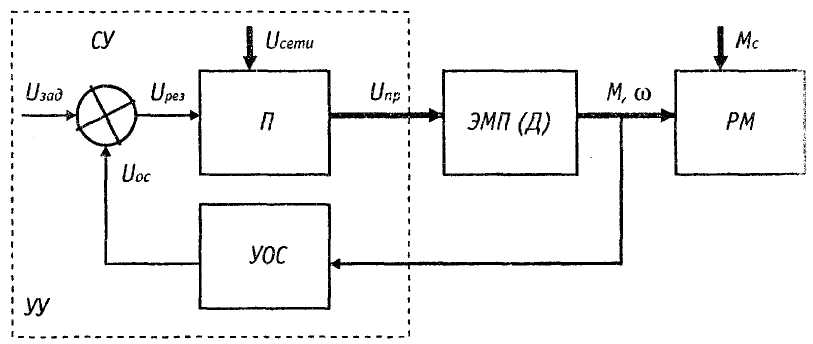
Рис. 17.1. Вариант блок-схемы электропривода
В общем случае ЭП включает преобразователь П, электромеханический преобразователь (электродвигатель) ЭМП (Д), рабочий механизм РМ, устройство (или устройства) обратной связи УОС, суммирующий узел СУ. Преобразователь П, устройства обратной связи УОС и суммирующий узел СУ образуют устройство управления УУ. В зависимости от типа ЭП в УУ могут входить и другие элементы управления.
Преобразователь П предназначен для преобразования напряжения сети U сети в напряжение U пр другой частоты и величины, напряжение той же частоты и переменной величины, постоянное напряжение, изменяющееся по величине, и до. Это напряжение подается на ЭМП (Д), который, развивая на валу вращающий момент М, непосредственно или через передаточное устройство приводит в движение (вращательное или поступательное) рабочий механизм РМ с моментом сопротивления Мс.
УОС служит для контроля, измерения и последующего учета ЭП регулируемой величины (на рис. 17.1 — частоты вращения ω).
УС осуществляет функцию суммирования задающего напряжения U зад и напряжения обратной связи по частоте вращения или иной величине U ос. Результирующее напряжение управления U рез, равное разности между задающим напряжением и напряжением обратной связи, определяет выходные параметры преобразователя и, следовательно, скорость вращения двигателя.
Блок-схема на рис. 17.1 соответствует структуре автоматизированных электроприводов — наиболее массовым типам ЭП. Другие типы ЭП могут иметь структуру большей или меньшей сложности.
Классификация электроприводов
В соответствии с ГОСТ-16593 ЭП классифицируются по следующим характеристикам:
1. По количеству и связи исполнительных, рабочих органов:
1.1. Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
1.2. Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
1.3. Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
1.4. Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
1.5. Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических
связей, используется электрическая связь двух или нескольких ЭМП.
2. По типу управления и задаче управления:
2.1. Автоматизированный ЭП, управляемый путем автоматического регулирования параметров и величин.
2.2. Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
2.3. Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
2.4. Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
2.5. Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
3. По характеру движения:
3.1. ЭП с вращательным вращательный движением.
3.2. Линейный ЭП с линейными двигателями.
3.3. Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
4. По наличию и характеру передаточного устройства
4.1. Редукторный ЭП с редуктором или мультипликатором
4.2. Электрогидравлический с передаточным гидравлическим устройством.
4.3. Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
5. По роду тока:
5.1. Переменного тока.
5.2. Постоянного тока.
6. По степени важности выполняемых операций:
6.1. Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
6.2. Вспомогательный ЭП.
Электродвигатель
В настоящее время самым массовым преобразователем электроэнергии в механическую энергию, является асинхронный электродвигатель, используемый повсеместно. Своей популярностью электрический мотор обязан простоте конструкции, небольшим габаритам и отсутствию коммутационных ограничений по току, частоте вращения и т. д. Именно электродвигательявляется базовой основой, на которой конструируется вся приводная техника, цель которой – автоматизация технологических процессов. Например,электродвигатель способен эффективно регулировать скорость подачиконвейерной ленты или модульной цепи, влияя тем самым на производительность линии. Подобного типа электродвигатель используется в конструкции преобразователя угловых скоростей и вращающих моментов, каковым являетсямотор-редуктор, широко применяемый как отдельно, так и в составе машин и механизмов. Для этого электродвигатель и понижающий количество оборотов на выходе редуктор, объединяют в единый компактный агрегат с выходным валом. Благодаря тому, что электродвигатель отлично совместим с большинством технологического оборудования, его применяют в подъемно-транспортных механизмах, конвейерах, транспортерах и пр. Мотор-редуктор на основе асинхронного электродвигателя способен при необходимости снижать скорость движения конвейерной ленты, за счет чего ресурс, которым обладают конвейерные комплектующие, существенно увеличивается. В частности, роликовые подшипники, которые, как правило, используются в конвейерных системах и подшипниковые опоры, служат до 2-3-х раз дольше. Кроме того, электродвигатель надежен и долговечен, его легко обслуживать, он ремонтопригоден, превосходно интегрируется в любую систему. Таким образом, можно сделать вывод, что электродвигатель, это основа основ приводной техники, с помощью которой становится возможным в точности соблюсти технологии производства и исключить простои.
История создания двигателей уходит в глубокую древность. Сложными путями шел человек к открытию и познанию законов физики, созданию различных механизмов, машин. Впервые двигатель назвал машиной римский зодчий Марк Полион (1в. до н.э.). Важнейшим этапом в развитии электроэнергетики явилось изобретение и применение электродвигателей. Принцип действия электродвигателей основан на физическом явлении: виток проводника, по которому протекает электрический ток, будучи помещенным между магнитами, движется поперек силовых линий магнитного поля. Электродвигатель, как правило, компактнее других двигателей, всегда готов к работе, может управляться на расстоянии. История электродвигателя - сложная и длинная цепь открытий, находок, изобретений. Проследим этапы развития электродвигателей. I этап. Начальный период развития электродвигателя (1821-1834 г.г.). Он тесно связан С созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую. В 1821 г. М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита, или вращение магнита вокруг проводника. Опыт Фарадея показал принципиальную возможность построения электрического двигателя. Многие исследователи предлагали различные конструкции электродвигателей. Первые электродвигатели напоминали по устройству паровые машины: двигатель Дж. Генри (1832 г.) и двигатель У. Пейджема (1864 г.) имели коромысла, кривошип, шатун, а также золотники (переключатели тока в соленоидах, заменявших собой цилиндр).
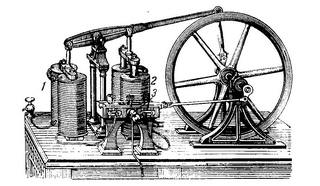
П. Барлоу предложил «колесо Барлоу». Оно состояло из постоянного магнита и зубчатых колес, скользящий контакт осуществлялся с помощью ртути, а питалось колесо от гальванического элемента. Дж. Генри предложил в 1832 г. Модель двигателя с возвратно-поступательным движением: подвижный электромагнит поочередно притягивался к постоянным магнитам и отталкивался от них, замыкая и размыкая батареи гальванических элементов. Он совершал 75 качаний в минуту. Было еще много попыток создания двигателей с качательным движением якоря. Однако, Более прогрессивными оказались попытки построить двигатель с вращательным движением якоря. II этап. Второй этап развития электродвигателей (1834-1860 г.г.) характеризуется конструкциями с вращательным движением явнополюсного якоря. Однако, вращательный момент на валу у таких двигателей обычно был резко пульсирующим. В 1834 г. Б.С. Якоби создал первый в мире электрический двигатель постоянного тока, В котором реализовал принцип непосредственного вращения подвижной части двигателя.
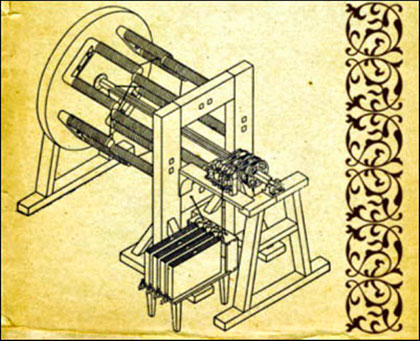
В 1838 г. этот двигатель (0,5 кВт) был испытан на Неве для приведения в дивжение лодки с пассажирами, т.е. получил первое практическое применение. Испытания различных конструкций электродвигателей привели Б.С. Якоби и других исследователей к следующим выводам: -применение электродвигателей находится в прямой зависимости от удешевления электрической энергии, т.е. от создания генератора, более экономичного, чем гальванические элементы; -электродвигатели должны иметь по возможности малые габариты и по возможности большую мощность и больший коэффициент полезного действия. III этап. Третий этап в развитии электродвигателей (1860-1887 г.г.) связан с разработкой конструкций с кольцевым неявнополюсным якорем и практически постоянным вращающим моментом. На этом этапе стоит отметить электродвигатель итальянца А. Пачинотти (1860 г.).
Его двигатель состоял из якоря кольцеобразной формы, вращающегося в магнитном поле электромагнитов. Подвод тока осуществлялся роликами. Обмотка электромагнитов включалась последовательно с обмоткой якоря (т.е. электромашина имела последовательное возбуждение). Габариты двигателя были невелики, он имел практически постоянный вращающий момент. В двигателе Пачинотти явнополюсный якорь был заменен неявнополюсным. Барабанный якорь, в котором рабочим является проводник, составляющий виток, был изобретен лишь в 1872 г. В. Сименсом. Еще через 10 лет в железе якоря появились пазы для обмотки (1882 г.). Барабанный якорь машины постоянного тока стал таким, каким мы его можем видеть в настоящее время. Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешевого источника электрической энергии – электромагнитного генератора постоянного тока. В 1886 г. электродвигатель постоянного тока приобрел основные черты современной конструкции. В дальнейшем он все более и более совершенствовался. По роду тока электродвигатели стали делиться на машины переменного и постоянного тока; по принципу действия машины переменного тока делятся на синхронные и асинхронные. Асинхронные двигатели отличаются простотой конструкции, малой стоимостью, надежностью в работе. Они являются самым распространенным видом двигателей.